




Conocer la concordancia entre el ángulo del eje mecánico femorotibial medido en radiografías y en navegación quirúrgica, tanto en el pre como en el postoperatorio al implantar una artroplastia total de rodilla.
Material y métodoSe analizaron las mediciones pre y postoperatorias en 88 artroplastias totales del mismo modelo y realizadas todas con el mismo sistema de navegación quirúrgica. Se valoró el ángulo frontal mecánico (AMFFT) y anatómico femorotibial pre y posquirúrgico. Para ello se utilizó una telerradiografía en bipedestación, donde se midió el ángulo mediante técnicas digitalizadas. En la navegación se recogió el ángulo femorotibial en reposo y en varo-valgo forzado, hallándose la media de estos 3 valores.
ResultadosLa media del AMFFT preoperatorio medido en la radiografía fue 4,55°. La media del mismo ángulo medido en la radiografía postoperatoria fue de 1,72°, con diferencias estadísticamente significativas. La media del AMFFT medido con la navegación antes de iniciar la técnica quirúrgica fue de 3,12° y tras el implante con navegación fue de 0,53°, también con diferencias estadísticamente significativas (p=0,013). El coeficiente de concordancia entre el AMFFT preoperatorio en telerradiografía y en navegación fue de 0,869 (p<0,001) y en el postoperatorio de 0,709 (p=0,017).
ConclusionesHemos encontrado una fuerte concordancia en el AMFFT entre la medición con radiografías y con navegación quirúrgica. Ello puede suponer que no es necesaria la realización de una telerradiografía cuando se utiliza navegación en el implante de una artroplastia total de rodilla.
To establish the concordance between angulation of the femoro-tibial mechanical axis measured with x-rays and surgical navigation in both the pre and postoperative period after a total knee arthroplasty (TKA) was implanted.
Material and methodPre and postoperative measurements were analyzed in 88 TKA of the same model and all performed with the same surgical navigation system. The mechanical frontal angle (MFA) and femoro-tibial anatomic angle were measured before and after the TKA. The angulation was digitally measured with a teleradiography. In the navigation, the femoro-tibial angle at rest, forced varus and valgus were registered and the average of these three measurements was calculated.
ResultsThe mean preoperative MFA measured on the radiograph was 4.55°. The mean of the same angle measured on the postoperative radiograph was 1.72°, (p=0.05). The mean of the MFA measured with navigation before TKA was 3.12° and after the implant with navigation was 0.53 (P=.013). The concordance coefficient between the MFA in teleradiography and in navigation was 0.869 (P<.001) preoperatively and 0.709 postoperatively (P=.017).
ConclusionsWe found a strong concordance between radiographic and surgical navigation measurements of the MFA. This may imply that teleradiography is not necessary when using surgical navigation in TKA.
Los óptimos resultados obtenidos en las últimas décadas con la artroplastia total de rodilla (ATR) pueden atribuirse a la mejora de los materiales, al perfeccionamiento de la instrumentación quirúrgica, al estudio y control del balance ligamentoso y a la correcta alineación obtenida siguiendo el eje mecánico de la extremidad. No puede dudarse de que la mejora en la instrumentación ha conseguido que sean excepcionales errores groseros en esta alineación, pero se sabe que un porcentaje elevado de ATR presenta desviaciones patológicas del eje femorotibial1 sin relación directa con la experiencia del cirujano.
Para la medición del eje mecánico de la extremidad se recomienda la realización de una telerradiografía en carga2. Este método presenta desventajas; por una parte la radiación que supone para el paciente, por otra su disponibilidad y por otra las dificultades que supone seguir una correcta técnica en el departamento de radiología al no valorar adecuadamente la rotación de la pierna3.
La introducción de la navegación quirúrgica para el implante de las ATR permite la posibilidad de realizar una cirugía individualizada con mejor control de los cortes óseos, del tamaño y de la posición de la artroplastia y del balance ligamentoso. Con este mejor control de los gestos quirúrgicos se espera conseguir una mejoría en los resultados clínicos a largo plazo y que sobre todo, en grandes deformidades o rodillas complejas, el cirujano actúe con mayor seguridad y destreza4,5.
En la técnica de navegación sin imágenes preoperatorias y a través de la recogida y palpación de puntos anatómicos se puede visualizar el eje mecánico pre y postoperatorio de la extremidad, quedando reflejado en el archivo informático del sistema. Podría considerarse que esta medición sustituiría a la medición radiográfica con las ventajas que ello aportaría en cuanto a radiación y coste económico. En la literatura publicada no hay acuerdo en este sentido, y el objetivo de este trabajo es demostrar que la telerradiografía pre y posquirúrgica para hallar el eje mecánico de la extremidad no es necesaria cuando se implanta una ATR con navegación.
Material y métodosEstudio prospectivo. La serie constó de 88 ATR implantadas con navegación en 82 pacientes (6 casos bilaterales); 23 casos eran varones y 65 mujeres. La edad media fue de 72 años (SD: 9,07). El índice medio de masa corporal fue de 31 (SD: 3,5). En 34 casos se observó en la radiografía inicial un ángulo mecánico frontal femorotibial (AMFFT) en varo mayor de 3°, en 31 un normo eje y en 23 un ángulo en valgo mayor de 3°. El diagnóstico en todos los casos fue gonartrosis tricompartimental en pacientes que habían realizado previamente un tratamiento físico y farmacológico sin resultado. Como criterios de exclusión se consideraron la ausencia de medición radiográfica pre o postoperatoria y la dificultad para realizar la medición de los ángulos en la telerradiografía debida a defectos de rotación.
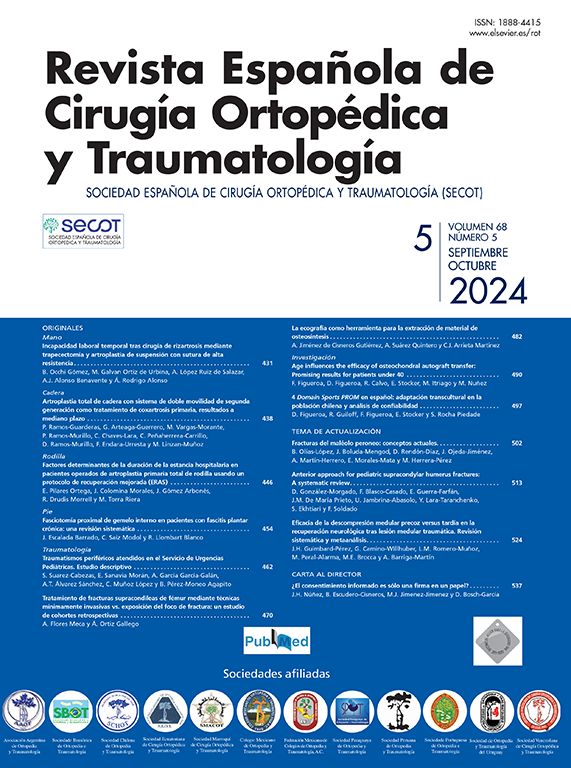
Los pacientes siguieron un mismo protocolo preoperatorio y una similar técnica quirúrgica. Fueron citados en el departamento de radiología un mes antes de la intervención y un mes tras el implante de la ATR. Se realizó una telerradiografía incluyendo cadera, rodilla y tobillo, en apoyo bipodal con proyección centrada en la rodilla. No se consideraron para este trabajo las telerradiografías con defectos posicionales por alteraciones en la rotación de la extremidad o con flexión de la rodilla. Se colocó a la altura del muslo un calibrador con el objeto de poder realizar mediciones en las radiografías digitalizadas. Se realizó la medición del ángulo mecánico frontal femorotibial y anatómico (AAFFT), tanto antes como después del implante de la ATR (fig. 1). La medición se realizó por 2 autores del trabajo (AAS y SR), que tenían amplia experiencia en la planificación preoperatoria, considerando la media de ambas mediciones si había diferencias entre ellos. Se utilizó el programa Impax 6.3.1. 2813 (Agfa Healthcare N.U. Montsel, Belgium y Agfa-Orthopaedic Tools Version 2.06). Los pacientes fueron informados sobre el objetivo y las características del estudio mediante un consentimiento informado específico realizado para este trabajo. Se obtuvo la autorización del comité ético regional, al formar parte este trabajo de un proyecto del Instituto de Salud Carlos III para la investigación biomédica.
 y anatómico (AAFFT). Imagen preoperatoria (AMFFT: –5,2°, AAFFT: 2,8°). Imagen tras la planificación preoperatoria (AMFFT: 0°, AAFFT: 7,9°).")
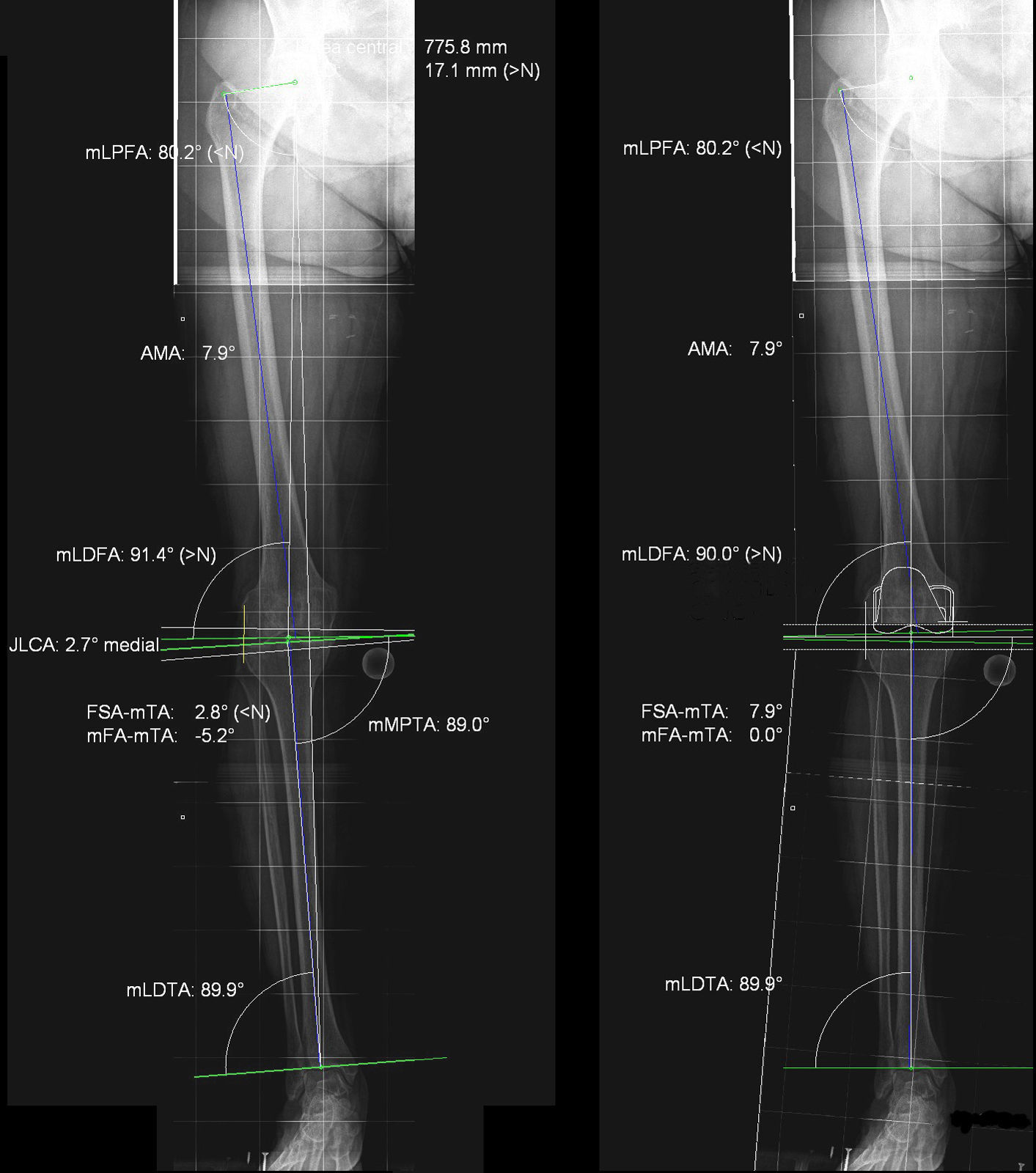
Todas las artroplastias implantadas fueron del modelo Apex (Omnilife Science, Massachusetts, EE. UU.). Para la navegación se utilizó siempre el sistema Nano Station (Total Knee Surgetics, Praxim, S.A. La Tronche, Francia) y fueron implantadas por 2 cirujanos (DHV y ANF). El navegador utilizado contiene un PC de panel, una unidad de lectura/grabación de CD-ROM, un lector de tarjetas y una cámara de infrarrojos. Su funcionamiento se basa en interfaces exteriores ergonómicas, pantalla táctil y pedal de órdenes doble. Tras la recogida de datos mediante puntero se obtuvo la alineación preoperatoria femorotibial (fig. 2). Se tomaron 3 ángulos: en reposo y en estrés forzado varo y valgo, hallándose la media de los 3. Al acabar el implante de la artroplastia se recogió esta misma información a través de la pantalla del navegador.

Los datos fueron analizados estadísticamente mediante el modelo general lineal de medidas repetidas (GLM) y el análisis de concordancia por correlación intraclase (CCI). El GLM permite evaluar las diferencias en los resultados en una o más variables cuantitativas entre diferentes grupos y en mediciones seriadas en el tiempo. El análisis es pareado, por lo que se considera siempre el cambio de cada sujeto consigo mismo. El GLM permite valorar el efecto de interacción de una o más variables con las variables estudiadas.
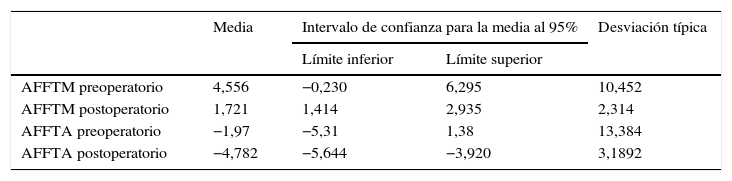
ResultadosLa media del AMFFT preoperatorio medido en la telerradiografía fue 4,55° (SD: 10,45). La media del AMFFT postoperatorio también medido en la telerradiografía fue de 1,72 (SD: 2,31). Se encontraron diferencias significativas entre ambos ángulos (p=0,05) (modelo general lineal). La media del AAFFT preoperatorio radiográfico fue de –1,97° (SD 13,38), y en el postoperatorio de –4,78° (SD 3,19) (tabla 1). Por tanto, la diferencia de las medias entre el AMFFT y AAFFT en el preoperatorio fue de 2,58° y en el postoperatorio de –3,06°.
Ángulo femorotibial mecánico y anatómico pre y postoperatorio, medido en la telerradiografía
| Media | Intervalo de confianza para la media al 95% | Desviación típica | ||
|---|---|---|---|---|
| Límite inferior | Límite superior | |||
| AFFTM preoperatorio | 4,556 | −0,230 | 6,295 | 10,452 |
| AFFTM postoperatorio | 1,721 | 1,414 | 2,935 | 2,314 |
| AFFTA preoperatorio | −1,97 | −5,31 | 1,38 | 13,384 |
| AFFTA postoperatorio | −4,782 | −5,644 | −3,920 | 3,1892 |
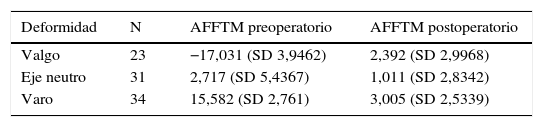
La media del AMFFT medido con la navegación antes de iniciar la técnica quirúrgica fue de 3,12° (SD: 6,61) y tras el implante con navegación fue de 0,53° (SD 1,94) (p=0,013) (modelo general lineal) (tabla 2). Cuando la deformidad preoperatoria del eje mecánico fue superior a 3° (en varo o en valgo) la mejoría fue mayor que en las rodillas con ejes neutros sin deformidad (<3°) (p<0,001) (modelo general lineal) (tabla 3).
El coeficiente de concordancia entre el AMFFT preoperatorio en telerradiografía y en navegación fue de 0,859 (IC 95%: 0,825-0,936) (CCI p<0,001) y en el postoperatorio de 0,709 (IC 95%: 0,678-0,896) (CCI p=0,017).
DiscusiónEn los últimos años ha habido controversias en relación con la conveniencia de reproducir el eje previo de la extremidad del paciente o buscar un eje neutro de±3°. Aunque esta discusión aún está vigente, así como la necesidad de encontrar el eje cinemático más que el mecánico, hasta ahora parece demostrado que conseguir un eje mecánico neutro o en ligero valgo6,7 debe ser un esencial objetivo en los implantes de prótesis de rodilla.
Para ello el hallazgo del eje mecánico de la extremidad antes y después de una ATR es considerado como una medida fundamental para evaluar la calidad y los resultados de la técnica. La radiografía exclusivamente de la rodilla no permite hallar el eje mecánico de la extremidad. En un reciente trabajo8 se ha comprobado que en el estudio preoperatorio existía una discordancia en el eje mecánico medido en telerradiografía o en radiografías de la rodilla de un 14%, que aumentaba al 33% en la medición postoperatoria. La radiografía de la rodilla puede medir el eje anatómico, pero no el mecánico, por lo que debería excluirse de los protocolos y guías clínicas la petición de esta radiografía si deseamos conocer el eje mecánico antes o después de la ATR.
No obstante, la medición del eje mecánico en telerradiografía está sujeta a errores sobre todo por mala colocación de la pierna, defectos en la proyección radiográfica o por la flexión de la rodilla. La mayor dificultad es conseguir una correcta rotación de la rodilla, e incluso se han descrito fórmulas para conseguirlo, apoyándose en la posición de la cabeza del peroné en relación con la tibia3,9. Una correcta posición rotacional mostrará la cabeza del peroné superpuesta exactamente 1/3 sobre la tibia. Se considera que hay una rotación externa si la cabeza del peroné esta superpuesta más de 1/3. Una rotación externa marcada muestra una superposición mayor de 2/3 y una rotación interna exagerada mostrará la cabeza del peroné completamente visible (fig. 3). En nuestra serie estas malposiciones se han evitado colocando siempre el pie en 10° de rotación externa y descartando las radiografías en las que la rótula no estuviera centrada y la cabeza del peroné superpuesta en 1/3 a la tibia. Otras posibles causas de errores son una inadecuada proyección radiográfica (debe ser perpendicular al espacio articular entre la rótula y los cóndilos femorales) o la deficiente colocación del calibrador. Este calibrador, de 25mm de diámetro, debe adherirse a la piel del paciente en el momento de efectuar la radiografía y debe estar colocado cerca de la rodilla. Hay discusión en la literatura sobre la conveniencia de hacer la telerradiografía de una o de las 2 extremidades inferiores10.
.")
La diferencia entre el eje mecánico y anatómico del fémur es de unos 7°±2°, lo que no sucede en la tibia, donde el eje mecánico y anatómico son paralelos y similares. El eje mecánico femorotibial atraviesa la rodilla a unos 5-8mm medial al centro de la misma, lo que se llama desviación del eje mecánico. También de forma fisiológica existe una desviación en valgo entre el eje anatómico del fémur y de la tibia11. Según lo descrito en la literatura el eje anatómico femorotibial forma un ángulo de unos 6,8°±1,4° y de 1,2°±2° el mecánico12,13. En nuestra serie la diferencia entre el eje anatómico y mecánico de la extremidad se mantuvo en cifras similares a las apuntadas en la bibliografía. Tras el implante de la ATR el eje mecánico se normalizó tanto en las mediciones con telerradiografía como con la navegación.
La cirugía asistida con ordenador ha mostrado su utilidad en cuanto al mejor eje mecánico conseguido14. Un inconveniente descrito en la navegación es la imprecisión de la toma de referencias. En contra de algunos trabajos creemos que los datos recogidos en la navegación son precisos e independientes de la experiencia del cirujano15. Esta técnica proporciona mejores resultados clínicos a medio y corto plazo16, y aunque a largo plazo aún no han sido corroborados estos hallazgos, es de esperar que una mejor alineación en todos los ejes, un mejor balance ligamentoso y en definitiva una cirugía personalizada como la realizada con la navegación, aporte mejores resultados y una mayor supervivencia del implante. Un reciente trabajo ha encontrado una supervivencia del 87% en cirugía estándar versus 98% en navegación a los 10 años17, y en otro18 se ha comprobado un menor número de revisiones por mal alineamiento cuando se ha hecho cirugía asistida con ordenador. En nuestra serie con la navegación se obtuvo un AMFFT próximo al eje neutro.
Hay mucha controversia en la literatura sobre la concordancia entre el eje mecánico pre y postoperatorio medido con radiografías y con navegación. Algunos autores19,20 no la encuentran y lo atribuyen a que no puede ser igual el eje mecánico en bipedestación, como se hace la telerradiografía, que en navegación con el paciente sobre la mesa quirúrgica. En otros artículos8,21 sí se encuentra esta relación siempre que la radiografía se haya realizado correctamente, sobre todo en cuanto a la rotación de la extremidad, ya que se sabe que cerca del 10% de las radiografías muestran una rotación de la pierna inaceptable, lo que altera la medición del eje mecánico de la extremidad22. Nuestros resultados muestran una aceptable concordancia entre la medición del AMFFT en telerradiografía y en navegación. Este hecho lo relacionamos con varios factores. En primer lugar, con el correcto posicionamiento de la extremidad, lo que nos ha obligado a excluir radiografías defectuosas. En segundo lugar, porque hemos hallado la media del AMFFT en navegación medido en posición de reposo y en varo-valgo forzado. Esta maniobra, que practicamos sistemáticamente al iniciar la navegación para evaluar la necesidad de liberación ligamentosa, aporta además la ventaja de hallar el AMFFT real.
Como conclusiones de nuestro estudio creemos que la concordancia entre las mediciones tomadas en la radiografía y en la navegación permite evitar la realización sistemática de una telerradiografía en los pacientes que van a ser o han sido intervenidos con técnica de navegación. Esta restricción supone reducir costes, disminuir las radiaciones para el paciente y evitar la sobrecarga de los servicios de radiodiagnóstico.
Nivel de evidenciaNivel de evidencia iv.
Responsabilidades éticasProtección de personas y animalesLos autores declaran que para esta investigación no se han realizado experimentos en seres humanos ni en animales.
Confidencialidad de los datosLos autores declaran que han seguido los protocolos de su centro de trabajo sobre la publicación de datos de pacientes.
Derecho a la privacidad y consentimiento informadoLos autores declaran que en este artículo no aparecen datos de pacientes.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.
Este trabajo se ha realizado a través de una ayuda a la investigación del FIS (Instituto de Salud Carlos III) con fondos FEDER (PI12/01098).
