




Un sensor de imagen CMOS se compone de matriz de sensado, lógica de selección fila/columna y convertidor analógico-digital. El desempeño de este último influye en el desempeño global del sensor de imagen. Una alternativa estudiada en los últimos años, es la arquitectura de sobremuestreo, que a diferencia de la tradicional arquitectura Nyquist, alcanza la misma razón señal a ruido, pero con cuantificador de 1-bit. Esta importante ventaja es atractiva para depender menos de las imperfecciones tecnológicas de los circuitos. Este artículo presenta el diseño de un prototipo sensor de imagen CMOS con prestaciones básicas para fotografía digital, que incluye matriz de fotodiodos, circuitos de selección fila/columna y modulador sigma-delta a nivel de 4-columnas. La modulación sigma-delta aprovecha la ventaja del sobremuestreo, disminuye el ruido de cuantificación en banda, es robusto y compatible con dispositivos MOSFET. Para el diseño del modulador se optimizó la razón señal a ruido, a través de un modelo comportamental. Todos los circuitos se implementaron con reglas de diseño de señal mixta y se fabricaron en un solo chip con tecnología CMOS estándar. Los resultados de mediciones e imágenes obtenidas con el prototipo muestran que la metodología de diseño que se utilizó es fiable. Este prototipo es un circuito VLSI y es la base del diseño de nuevos sistemas de detección fotónica para diversas aplicaciones.
A CMOS image sensors is composed of array pixel, row/column selection logic and analog to digital converter. The performance of this latter influences the image sensor overall performance. An alternative studied in recent years, is the oversampling architecture, unlike traditional Nyquist architecture, has the same signal to noise ratio, but with 1-bit quantizer. It is major advantage is attractive to reduce dependence on technological imperfections of the circuits. This paper presents the design of a prototype CMOS image sensor with basic performance to digital still-photography, which includes sigma-delta modulator at the 4-columns. The sigma -delta modulation takes advantage of oversampling, robustness and compatibility with MOSFET devices. To design the modulator, the SNR was optimized, through a model which includes noise sources. All circuits were implemented with mixed signal design rules and manufactured on a single chip using standard CMOS technology. The results of measurements and images obtained with the prototype show that the design methodology used is reliable. This prototype is a VLSI circuit and is the basis for the design of the new photodetection systems in other applications.
Convertidor analógico digital
Sensor de imagen CMOS
Metal óxido semiconductor complementario
Convertidor digital analógico
Amplificador diferencial
Diodo emisor de luz
Transistor de efecto de campo de metal óxido semiconductor
Amplificador operacional
Sensor de pixel pasivo
Densidad espectral de potencia
Región de carga espacial
Razón señal a ruido
Razón señal a ruido de cuantificación
Velocidad de respuesta
Tiempo de establecimiento
Modulador sigma-delta
Como resultado del avance en los procesos de fabricación de circuitos integrados, llegó el sensor de imagen basado en silicio. Actualmente existen dos versiones: el dispositivo acoplado por carga o CCD y el sensor de imagen CMOS o CMOS' alt='Sensor de imagen CMOS'>CIS
(El Gamal y Eltoukhy, 2005).A mediados de los años 90 surgió el CMOS' alt='Sensor de imagen CMOS'>CIS
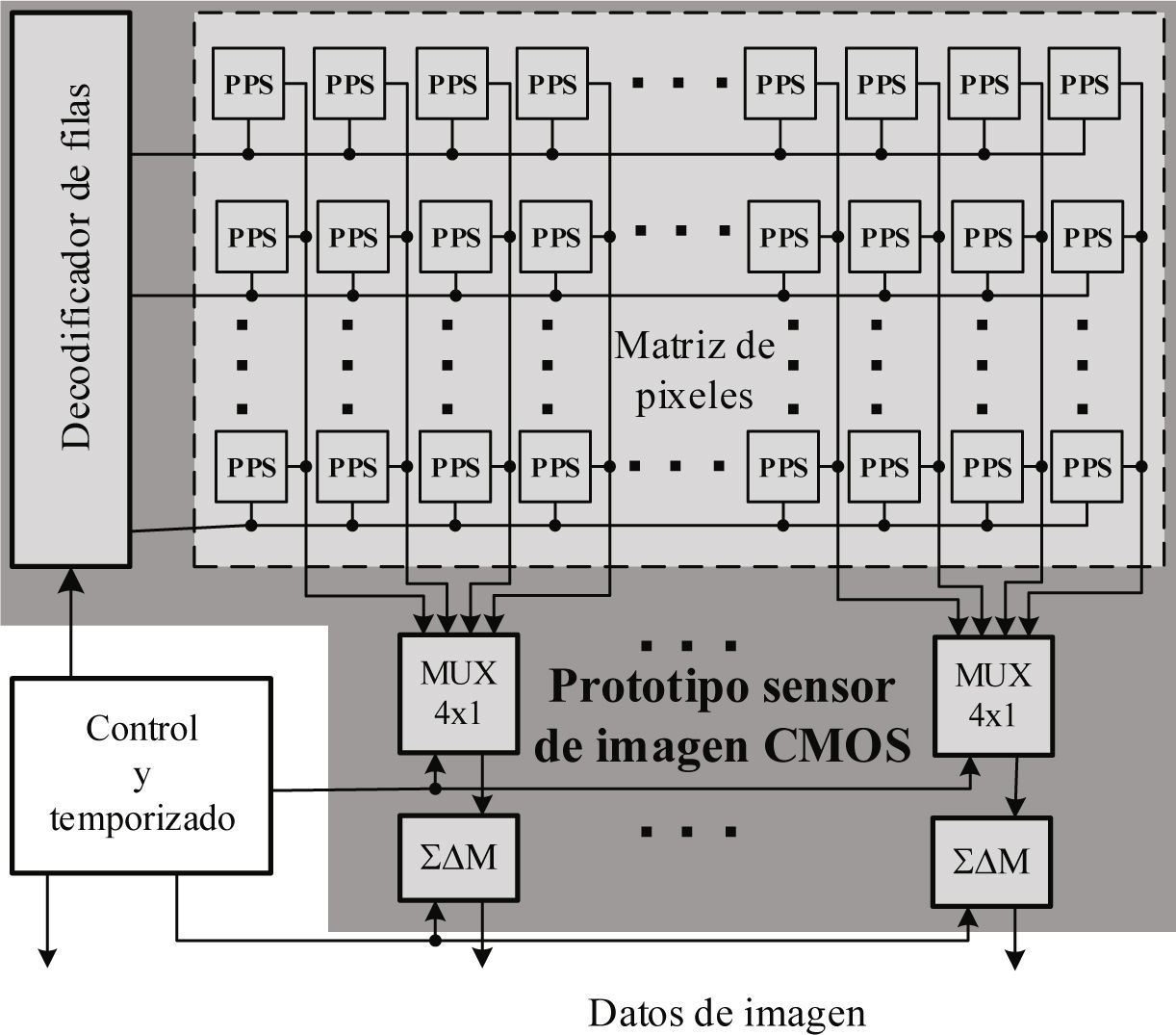
, fabricado en tecnología CMOS estándar, el cual se logró gracias al uso de máscaras. Un CMOS' alt='Sensor de imagen CMOS'>CIS es un chip constituido por: matriz de pixeles, decodificador, amplificadores, convertidor analógico-digital (ADC) y circuito de control y temporizado. Tradicionalmente, los diseñadores han implementado el ADC con arquitectura tipo Nyquist (Hwang y Song, 2014), esta arquitectura requiere una razón señal a ruido de cuantificación del orden de 50dB para alcanzar resoluciones de 8 bits. Dichos ADCs requieren un filtro limitador de ancho de banda, muestreador, cuantificador multinivel y codificador digital. Todo ello convierte a los ADCs tipo Nyquist en sistemas complejos de señal mixta de bajo desempeño, que utilizan espacio considerable en el chip.Una alternativa a los convertidores tipo Nyquist, que en años recientes se prefiere, es la conversión por sobremuestreo y particularmente, la técnica que usa modulador sigma-delta (ΣΔM). Un ΣΔM puede formar parte de un ADC o solamente ser un bloque de sensado. En cualquier caso, la salida de un ΣΔM es una versión digital de la señal, que llega a ser de alta resolución, pero con baja velocidad de conversión (De La Rosa, 2011). Debido a esto, los ΣΔM son útiles para la digitalización de señales de baja frecuencia. Un ΣΔM lleva a cabo dos operaciones: discretización en amplitud y suavizado del ruido de cuantificación (Proakis y Manolakis, 2007), es decir, el desplazamiento de componentes de ruido de cuantificación fuera del ancho de banda de interés. Tratándose de un ΣΔM de 1-bit, su salida produce una sucesión de pulsos digitales, en los cuales se encuentra codificada la señal de entrada, similar a la modulación por pulsos codificados o PCM.
Este artículo presenta el diseño de un prototipo sensor de imagen CMOS para fotografía digital elemental. En este prototipo se toma en cuenta el tiempo de exposición, el cual se determina por el tiempo de integración en los pixeles (también llamado shutter time). En una cámara fotográfica convencional, el tiempo de integración suele estar entre 30 s y 250μs. Para el prototipo CMOS' alt='Sensor de imagen CMOS'>CIS se seleccionó un tiempo de integración máximo de 4ms. Tomando este tiempo como referencia, realizar la lectura de una matriz de 24×32 pixeles, requeriría un tiempo de lectura por pixel (tl) de aproximadamente 5.2μs
El sistema en chip propuesto se presenta en la figura 1, incluye arreglo de 24×32 pixeles tipo PPS, selector de filas, columnas y ΣΔM cada 4-columnas. Los circuitos de control y temporizado son externos al chip. Se utilizó modelado comportamental a nivel sistema para la obtención de parámetros de diseño y proponer las dimensiones finales de los MOSFETs. Finalmente, los circuitos se implementaron con reglas de diseño de señal mixta y se fabricaron en un solo chip de 4mm2 con tecnología CMOS estándar pozo-n.
 CMOS.' title='Arquitectura para el prototipo sensor de imagen
CMOS.' title='Arquitectura para el prototipo sensor de imagen El resto de este artículo se organiza en seis secciones más. La segunda sección muestra las características del foto-detector. La tercera sección presenta la estimación de la razón señal a ruido de cuantificación (SQNR) del ΣΔM de 1er-orden y 1-bit; el objetivo es poner en perspectiva las variables involucradas en el diseño. La cuarta sección presenta el modelo comportamental del modulador y su simulación con herramientas computacionales, con ello identificamos los parámetros que degradan la razón señal a ruido (SNR). La quinta sección presenta el diseño a nivel circuito. La sexta sección presenta la implementación y mediciones del prototipo sensor de imagen CMOS, finalmente, las conclusiones.
Características del dispositivo foto-detectorEn el prototipo CMOS' alt='Sensor de imagen CMOS'>CIS
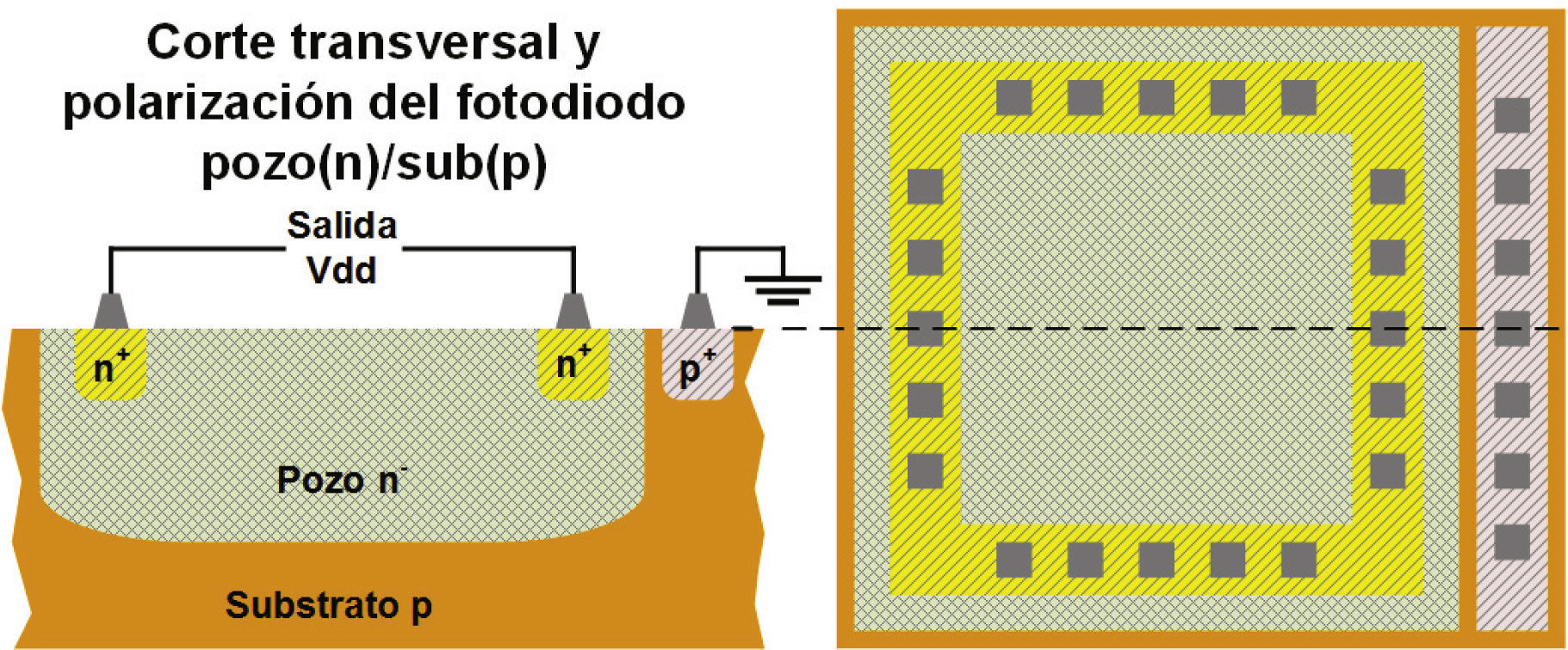
se empleó un fotodiodo pozo-n/substrato-p, para ofrecer mayor factor de llenado en tecnología CMOS estándar, frente a la fotocompuerta y el fototransistor; otra ventaja es su respuesta espectral, centrada entre 600 y 700nm (Murari et al., 2009). La estructura se muestra en la figura 2. El fotodiodo se polariza en forma inversa para generar una región de carga espacial (SCR) que da origen a un campo eléctrico y una capacitancia. Cuando los fotones inciden sobre el dispositivo, los huecos y electrones generados cercanos a los bordes de la SCR se arrastran hacia las regiones p y n, respectivamente, para así contribuir a la fotocorriente. Por otro lado, la capacitancia formada por la unión se utiliza como mecanismo de acumulación de carga.
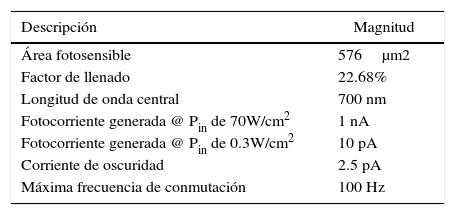
La tabla 1 resume las características eléctricas del fotodiodo, fabricado en tecnología CMOS estándar. De la tabla 1 se estima que el intervalo dinámico de la fotocorriente es de hasta cuatro órdenes de magnitud, lo que para el modulador representaría una señal de entrada con un intervalo dinámico de 40dB, suficiente para emplear un ΣΔM de 1er-orden.
Resumen de características del fotodiodo pozo-n/substrato-p (n/p+)
| Descripción | Magnitud |
|---|---|
| Área fotosensible | 576μm2 |
| Factor de llenado | 22.68% |
| Longitud de onda central | 700 nm |
| Fotocorriente generada @ Pin de 70W/cm2 | 1 nA |
| Fotocorriente generada @ Pin de 0.3W/cm2 | 10 pA |
| Corriente de oscuridad | 2.5 pA |
| Máxima frecuencia de conmutación | 100 Hz |
El desempeño del ΣΔM determina el desempeño global del prototipo CMOS' alt='Sensor de imagen CMOS'>CIS
, de ahí que su diseño deberá tomar en cuenta la mayor cantidad de aspectos físicos de un circuito modulador real. En este contexto, el diseño del ΣΔM inicia con la estimación analítica de la razón señal a ruido de cuantificación (SQNR) para una arquitectura ideal. Concretamente, se seleccionó un modulador de 1er-orden y 1-bit en tiempo discreto.Estimación analíticaEl ΣΔM ideal de 1er-orden y 1-bit, en tiempo discreto, se compone de un integrador de 1er-orden, un cuantificador de 1-bit y un lazo de retroalimentación negativa, como lo muestra la figura 3a. El integrador es un elemento acumulador y se modela con (1)
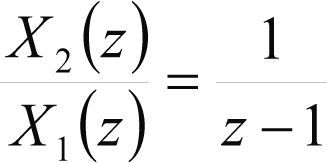
 diagrama a bloques del ∑ΔM ideal y b) modelo lineal.")
donde X1(z) y X2(z) son las señales de entrada y salida del integrador, respectivamente, como lo presenta la figura 3a.
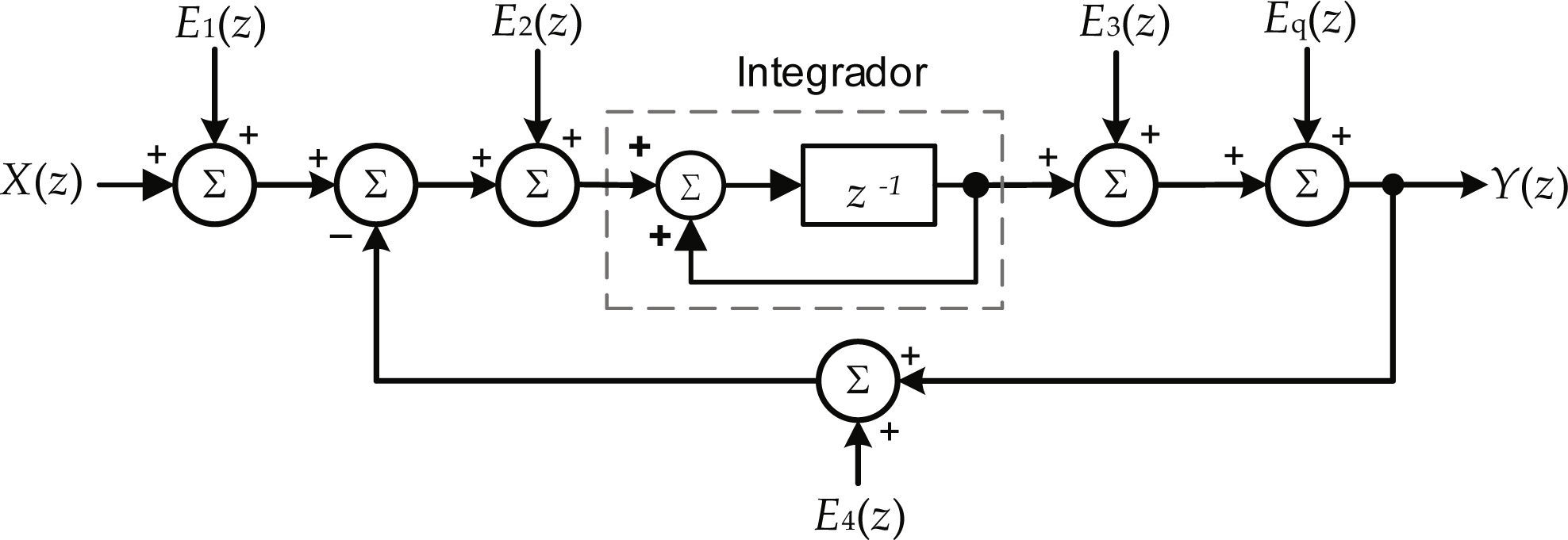
Por otro lado, el cuantificador de 1-bit se puede linealizar al modelarlo como una fuente de ruido blanco aditivo, con varianza eq2 y densidad espectral de potencia Neq(fs); esta aproximación se discute en Silva et al. (2009). Así, un cuantificador lineal con paso de cuantificación Δ y ruido distribuido uniformemente en el ancho de banda, tiene una densidad espectral de potencia (PSD) dada por (2)
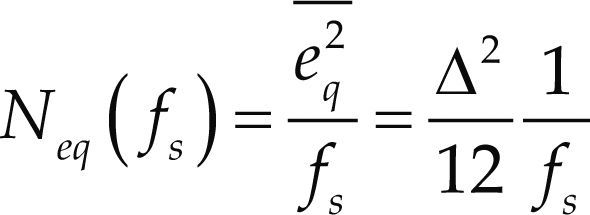
donde fs es la frecuencia de muestreo. De esta manera, el modelo se simplifica como lo presenta la figura 3b, cuya función de transferencia se obtiene por superposición. Primero haciendo X(z)=0 e incluyendo (1), se obtiene (5)



Luego, haciendo E(z)=0 e incluyendo (1), se obtiene (8)



De esta forma, la función de transferencia del sistema de la figura 3b es (9)

donde z-1 es la función de transferencia de la señal o STF y (1 - z-1) es la función de transferencia del ruido de cuantificación o NTF.
La SQNR se define como la relación entre la potencia de la señal de entrada y la potencia del ruido de cuantificación (Baker, 2010), es decir, SQNR=sm2¯/sq2¯BW. La potencia del ruido de cuantificación se obtiene de

donde R es la razón de sobremuestreo. Para estimar sm2¯ consideramos que al modulador entra una señal sinusoidal, con frecuencia fb, amplitud Ap y potencia. Así la SQNR es (11)

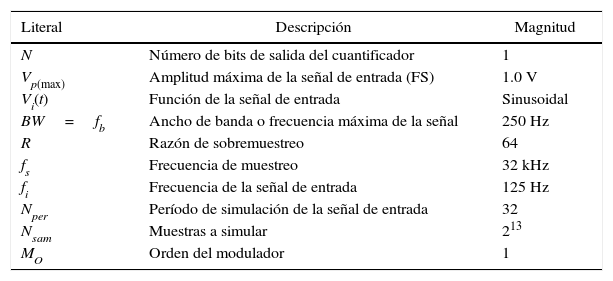
De (11), las variables posibles de optimizar son: la frecuencia de muestreo fs, a través de R y el número de bits N, a través de Δ. Por otro lado, con los parámetros de la tabla 2, la expresión (10) predice una SQNR de 50.77dB, lo cual es congruente con algunos resultados encontrados en la literatura (Malcovati et al., 2003).
Parámetros para simulación del ∑ΔM de 1er-orden y 1-bit en tiempo discreto
| Literal | Descripción | Magnitud |
|---|---|---|
| N | Número de bits de salida del cuantificador | 1 |
| Vp(max) | Amplitud máxima de la señal de entrada (FS) | 1.0 V |
| Vi(t) | Función de la señal de entrada | Sinusoidal |
| BW=fb | Ancho de banda o frecuencia máxima de la señal | 250 Hz |
| R | Razón de sobremuestreo | 64 |
| fs | Frecuencia de muestreo | 32 kHz |
| fi | Frecuencia de la señal de entrada | 125 Hz |
| Nper | Período de simulación de la señal de entrada | 32 |
| Nsam | Muestras a simular | 213 |
| MO | Orden del modulador | 1 |
Para verificar, se estimó la SQNR por medio de herramientas computacionales; la ventaja de estas radica en el hecho de que es posible evaluar directamente el modulador y con ello, tener una respuesta temporal. Esto permite fácilmente, agregar modelos comportamentales de fuentes de ruido presentes en un circuito modulador real.
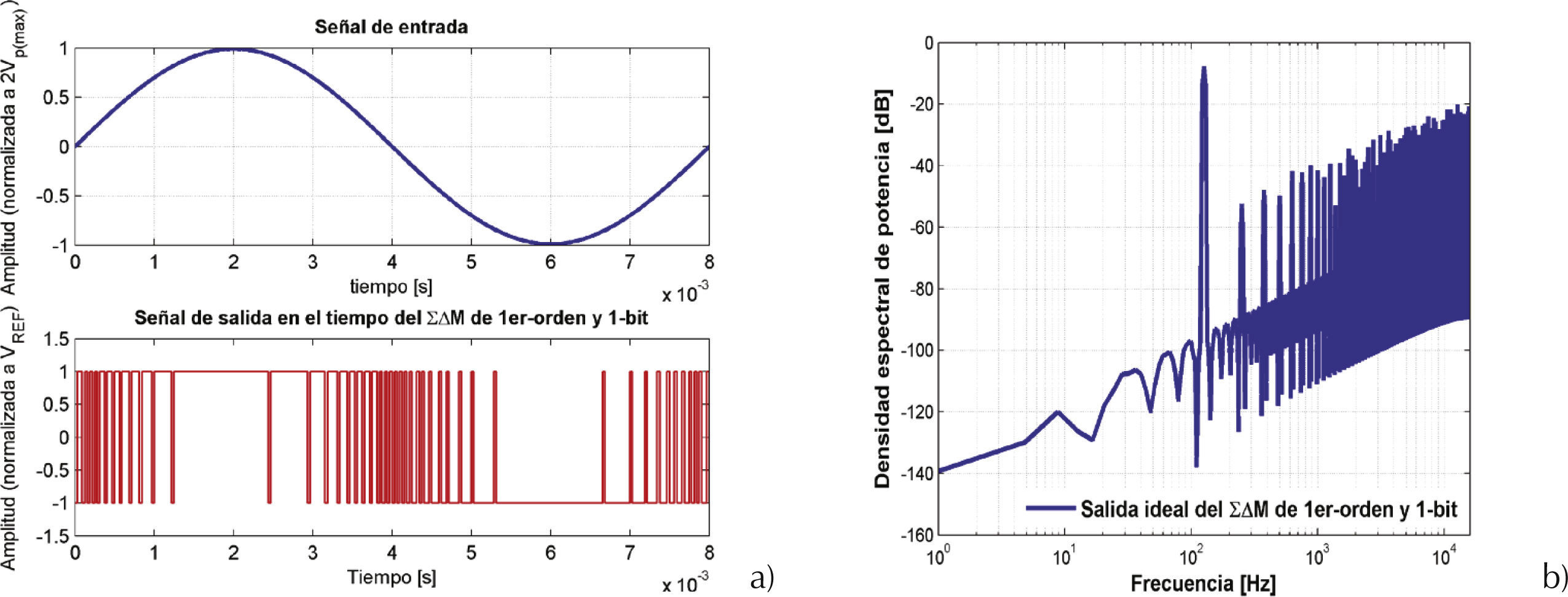
Estimación a partir de la respuesta temporalPara evaluar temporalmente el ΣΔM de 1er-orden y 1-bit (figura 3a) se seleccionó SIMULINK®, fundamentado en el hecho de que ha sido ampliamente utilizado para diseñar filtros paso-bajo, paso-bandas y convertidores basados en ΣΔM (Brigati, 2014). En consecuencia, el modelo de bloques se construye con las bibliotecas de SIMULINK®. Para una simulación con frecuencia de muestreo de 32kHz y señal de entrada de 125Hz, se obtiene un resultado temporal que se observa en la figura 4a. Este resultado muestra que una alta densidad de pulsos corresponde a valores máximos positivos y negativos de la señal de entrada; al obtener la PSD de dicha señal de salida (figura 4b), es posible estimar y sm2 ¯y sq2 ¯.
 señal de entrada y salida hacia y desde un ∑ΔM de 1-er orden y 1-bit, obtenido por simulación a nivel sistema, b) densidad espectral de potencia de la señal de salida del modulador.")
Como era de esperarse, en la figura 4b, el pico principal corresponde a la señal de entrada (125Hz), y las componentes del ruido de cuantificación se desplazan hacia frecuencias superiores, como lo predice la NTF (comportamiento de filtro paso-alto). Para una potencia de -0.1dB se determinó una SQNR de 52.19dB, la discrepancia de este resultado respecto a la estimación analítica, obedece a una correlación entre la amplitud de la señal de entrada y el ruido de cuantificación. Por otro lado, la expresión (11) no impone límites a fs y fb, sin embargo, hay un compromiso entre los requerimientos de la aplicación y los límites tecnológicos.
Para el prototipo CMOS' alt='Sensor de imagen CMOS'>CIS
una SQNR entre 30 y 50dB es aceptable, requiriendo el diseño de un solo integrador. Hoy día, aplicaciones de espectrometría clínica y bioluminiscencia se implementan con ΣΔM de 1er-orden (Perelman et al., 2001; Roh et al., 2009; Singh et al., 2011; Jung, 2013).Modelado de fuentes de ruido y no linealidades del circuitoEl prototipo CMOS' alt='Sensor de imagen CMOS'>CIS
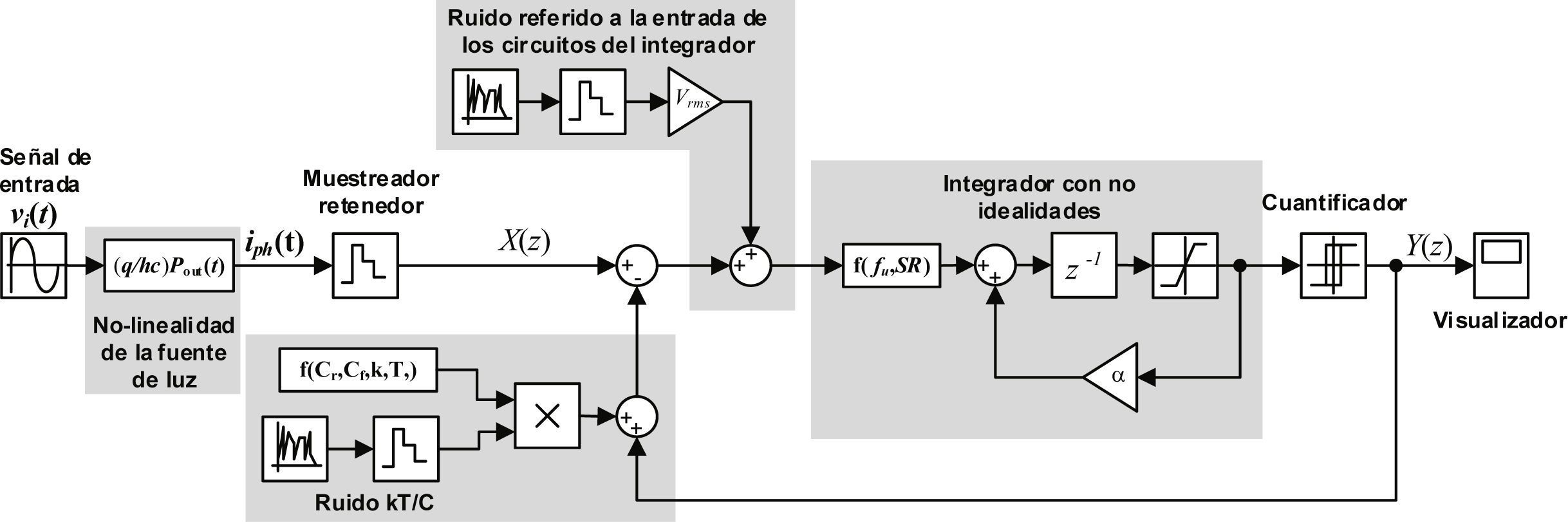
se diseña con la técnica capacitor conmutado en tecnología CMOS estándar. En este tipo de diseños existen no idealidades inducidas por los componentes del modulador y también imperfecciones originadas por el sistema de caracterización. El resultado de todas las imperfecciones se adicionan al ruido de cuantificación. El ruido de cuantificación se atenúa por el lazo de retroalimentación del modulador, pero no ocurre lo mismo con las otras fuentes de ruido.Es posible agregar fuentes de distorsión y proponer un modelo más realista como se presenta en la figura 5. La fuente E1 modela el ruido que acompaña a la señal de entrada, no linealidad del fotodiodo y ruido clock jitter inducido por la fase de reloj durante el muestreo. E2 incluye los efectos no ideales y el ruido referido a la entrada del integrador. E3 modela la no linealidad y el ruido referido a la entrada del cuantificador. E4 representa el ruido referido a la entrada y por clock jitter de un convertidor digital-analógico (DAC), necesario para la compatibilidad de señales. Finalmente Eq es el ruido de cuantificación. La función de transferencia del nuevo sistema se presenta en (12)


Eq y E3 se desplazan fuera del ancho de banda de interés y E1, E2 y E4 se distribuyen uniformemente en toda la banda, afectando el desempeño. Así la SNR se estima con (13)
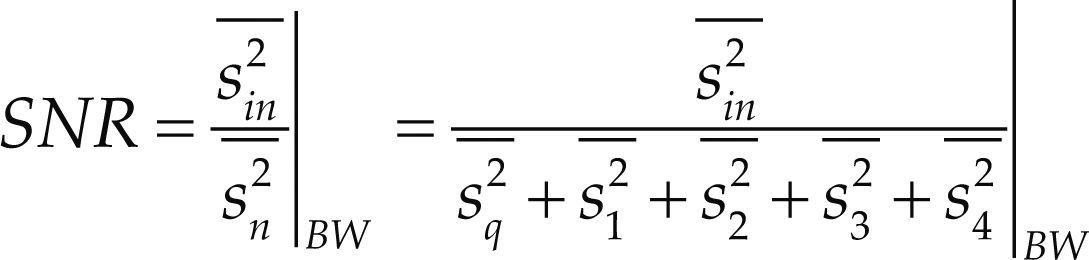
donde Sn2¯ es la potencia global de ruido. En la siguiente sección se presentan los modelos útiles en la estimación de Sn2¯ para la arquitectura del prototipo CMOS' alt='Sensor de imagen CMOS'>CIS.
Desde el punto de vista de las arquitecturas típicas de capacitor conmutado en CMOS estándar, las fuentes de ruido que afectan significativamente el desempeño del modulador son las siguientes: distorsión no lineal de la señal de entrada, ruido del DAC, efecto de la velocidad de respuesta (SR) para el amplificador operacional (OpAmp), efecto fu para el OpAmp, efecto de ganancia finita en CD para el OpAmp y ruido referido a la entrada del OpAmp.
Distorsión no lineal debido a la señal de entradaLa fuente de luz empleada en la caracterización proviene de un LED, así es posible modular y controlar fácilmente la potencia óptica incidente sobre el CMOS' alt='Sensor de imagen CMOS'>CIS
. La función de señal utilizada para polarizar el LED se da por (14)
donde fd es la frecuencia de la señal de polarización y determina el ancho de banda de la señal de entrada. Si se descarta el ruido shot, flicker y demás fenómenos que intervienen en la radiación radiativa, la potencia emitida pout, como lo presenta (15), es directamente proporcional a la corriente de polarización del LED.

donde
PBK=potencia debido a la luz de fondo
po=potencia de oscuridad
VB=punto de operación
Vm=factor de modulación
Las variables PBK, po, VB y Vm se toman en cuenta porque introducen distorsión no lineal en la señal de salida.
Por otro lado, los fotones que inciden sobre la región activa del fotodiodo se caracterizan por su potencia óptica incidente (pin en mW/cm2) y una respuesta espectral plana. Si se descartan los efectos de reflexión del sistema óptico y superficial del silicio, la luz incide directamente y la fotocorriente generada iph es (16)

donde
η=eficiencia cuántica
q=carga elemental
c=velocidad de la luz
Si además consideramos que cada fotón genera un par electrón-hueco y η=1, la fotocorriente resulta en (17)

La distorsión por señal de entrada (11) se añadió al modelo ΣΔM de la figura 3b como un bloque modulador de la señal de entrada, este se presenta la en figura 6.
 CMOS' alt='Sensor de imagen
CMOS' alt='Sensor de imagen Los efectos de las no idealidades del integrador por capacitor conmutado se estudiaron ampliamente por Bourdopoulos et al. (2003); Boser y Wooley (2002) y Ocampo (2004). Recientemente, se presentó en Malcovati et al. (2003) un resumen de los modelos comportamentales para el ruido kT/C, el efecto de la velocidad de respuesta (SR), fu y ganancia finita en DC. Para efectos de diseño del prototipo CMOS' alt='Sensor de imagen CMOS'>CIS se utilizaron esos modelos.
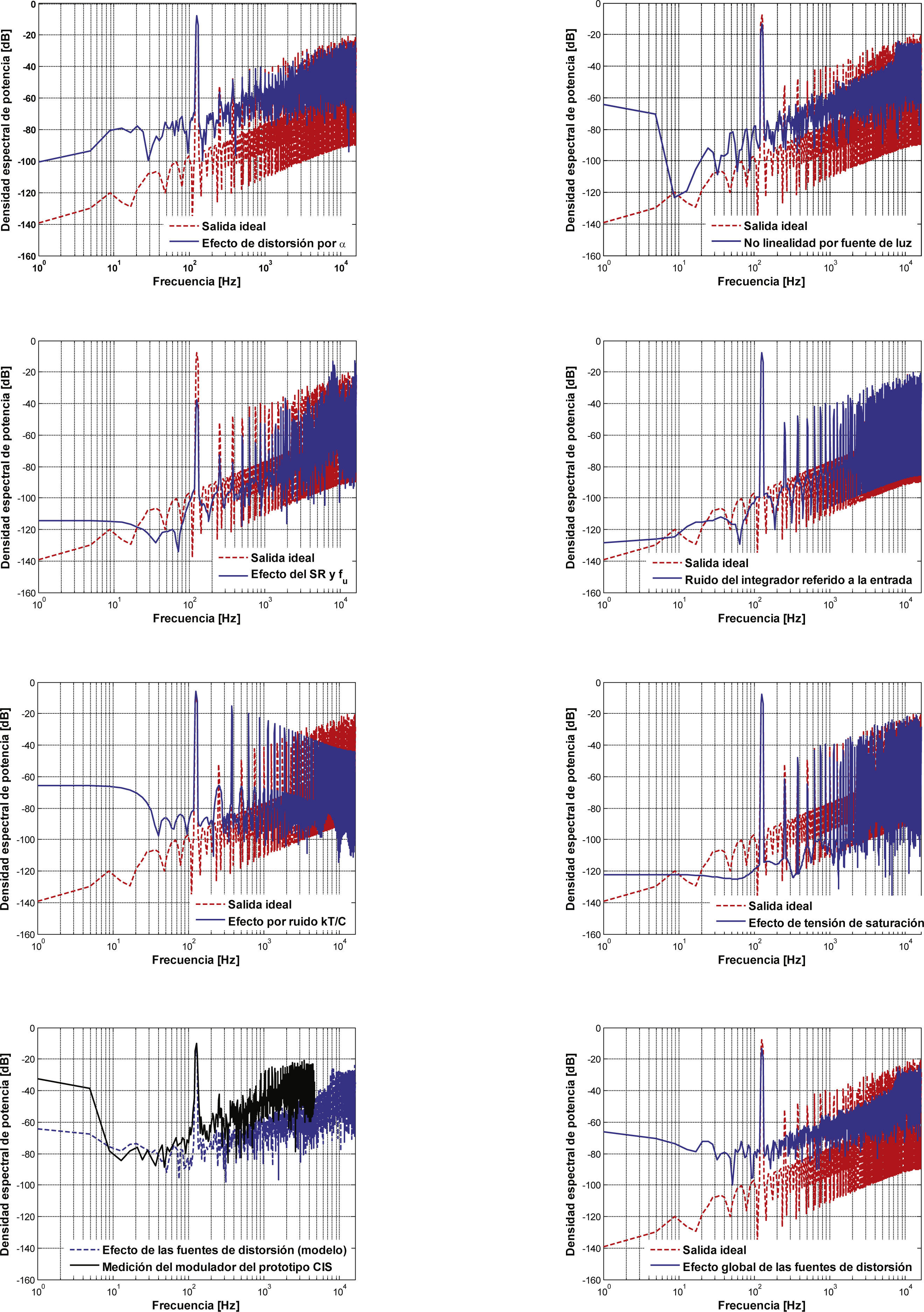
Resultados de simulaciones del sistemaEl modelo de la figura 6 se evaluó con los parámetros de la tabla 2. Para determinar el efecto de la no linealidad de la señal de entrada se utilizó po=92/Pmax y Vm=5.8mV, generando la PSD de la figura 7a. Los resultados muestran una SNR de 48dB, lo que representa 4.16dB por debajo del desempeño “ideal”. Se determinó que existe una contribución al ruido de fondo y componentes importantes de distorsión y de componente de corriente directa.

Los integradores reales tienen ganancia finita debido a una fracción de pérdida que es adicionada a cada nueva muestra a ser integrada (Boser y Wooley, 2002). Esta pérdida se modela por un factor α cuyo valor se encuentra entre 0 y 1. En el modelo propuesto, α es la ganancia de lazo de retroalimentación del integrador y se relaciona directamente con la ganancia del OpAmp. El efecto de α se evaluó con valores cercanos a 1 (un resultado se presenta en la figura 7b). Se determinó que por debajo de 0.983, la SNR cae a 50.72dB, apenas 1.46dB respecto del modelo “ideal”. El efecto es una contribución importante de ruido de fondo, pero con menor distorsión armónica, respecto del efecto de la distorsión por señal de entrada.
Por otro lado, si la frecuencia unitaria fu, del OpAmp impone un tiempo menor que el tiempo de establecimiento (ST), la ganancia del integrador se afecta. Para una adecuada operación, la máxima velocidad de respuesta debe ser una fracción del ST. Esta pérdida se modela con un bloque que modifica la ganancia del integrador, como se observa en la figura 6. Resultados de simulaciones, muestran que una fu ≥ 2fs no introduce distorsión debido al ST en la señal.
El efecto de la SR se exploró, fijando fu=2fs. Se concluyó que con una SR ≥ 0.75V fs se garantiza una pérdida de apenas 0.061dB. Un aspecto de importancia en este resultado, es que el efecto del ST se traduce en una pérdida de potencia de la señal de interés y prácticamente, no hay contribución de ruido de fondo. El efecto por ST y fu se muestra en la figura 7c.
Para el ruido referido a la entrada del OpAmp, se estimó que con 10µVHz existe una pérdida de 0.16dB (figura 7d). Por otro lado, para Cr>50pF, existirá 100µVHz de ruido kT/C y pérdida de 5.8dB (figura 7e). Debido a que el bloque DAC está en el lazo de retroalimentación, el ruido kT/C de ese bloque no presentó efecto alguno en el desempeño. Finalmente, el efecto de la tensión de saturación del integrador, trae como consecuencia un espectro como el de la figura 7f, lo que indica un fuerte incremento de componentes no lineales, una tensión de saturación mayor al paso de cuantificación (Vsat>Δ) no presenta ninguna alteración en la operación del modulador.
La tabla 3 presenta los parámetros de desempeño discutidos y se indica con √ el tipo de fuente de distorsión que dicho parámetro agrega al modelo ideal.
Resumen de los parámetros del modelo de la figura 8
| Parámetro de desempeño | Descripción | Magnitud | Ruido de fondo | Distorsión armónica | Componente de CD |
|---|---|---|---|---|---|
| po, Vm | Parámetros que originan distorsión en la señal de entrada | po=92/Pmax Vm=5.8 mV | √ | √ | √ |
| α | Efecto de ganancia finita en CD | ≥0.983 | √ | ||
| SR Velocidad de respuesta | ≤ 0.57 V/▵ fs | √ | |||
| fu | Frecuencia unitaria | ≥ 2fs | √ | ||
| vref, rms | Ruido referido a la entrada del OpAmp | ≤10µV/Hz | √ | √ | |
| eKT/C, rms | Ruido KT/C | Cr ≥ 50 pF | √ | √ | |
| Vsat | Tensión de saturación | ≥ Δ | √ | √ |
El conjunto de especificaciones obtenidas de simulaciones a nivel sistema, se relacionaron con características eléctricas para diseñar el circuito integrador a capacitor conmutador, las dimensiones de los capacitores Cr, Ci y características del cuantificador.
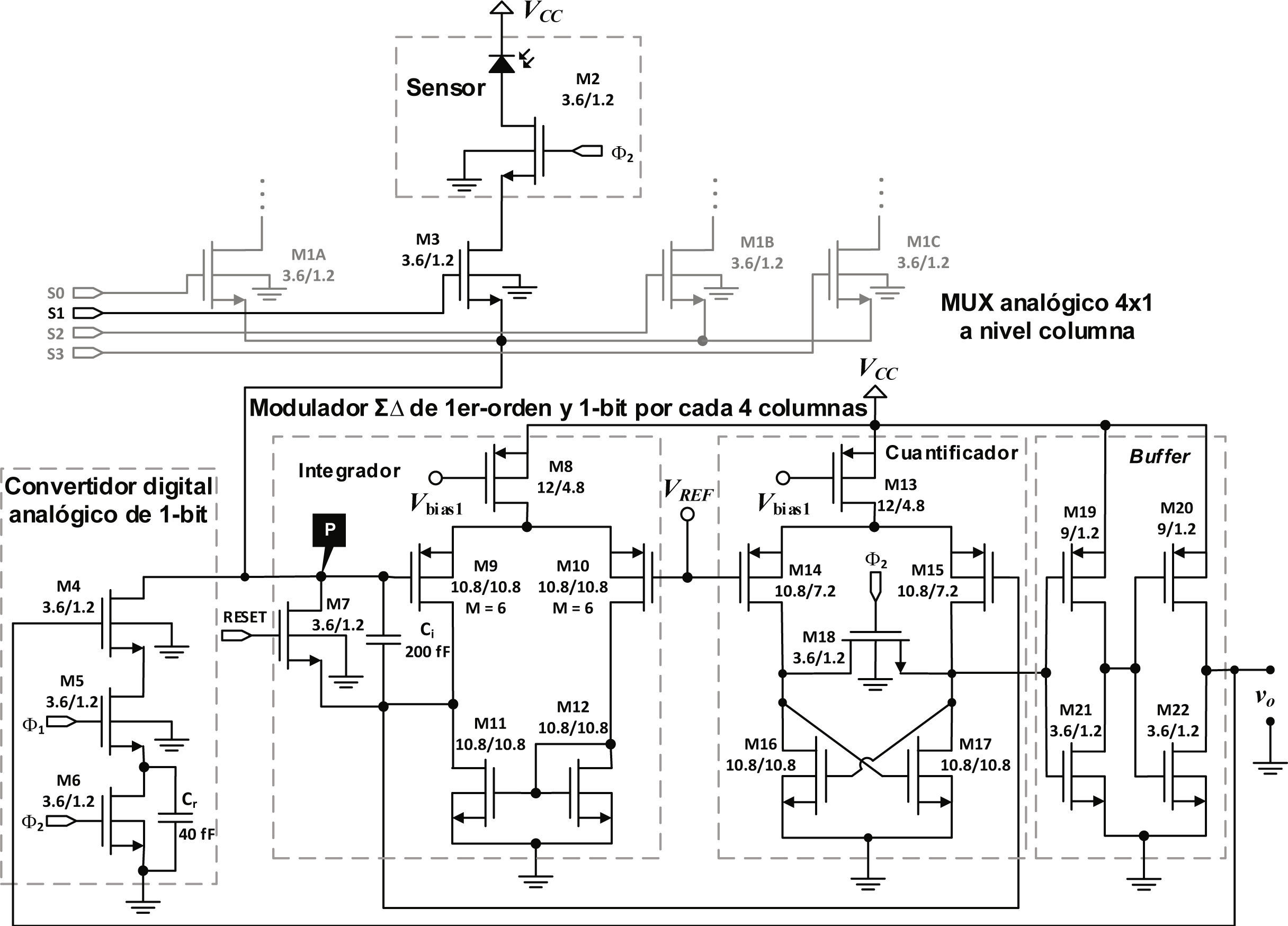
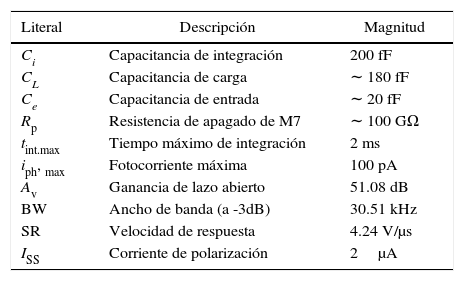
Circuito integrador de 1er-ordenTomando en cuenta la baja frecuencia de la señal a integrar, el alta ganancia del cuantificador, el requerimiento de polarización inversa del fotodiodo y para evitar efecto de cuerpo en los MOSFETs, se seleccionó un amplificador diferencial (DifAmp) p-MOSFET, como elemento activo del integrador, como se puede ver en la figura 8 (sección integrador). El capacitor Ci y las especificaciones del DifAmp determinan el tiempo máximo de integración tint, max y la precisión de conversión carga-tensión, respectivamente. La tensión de salida en el nodo P (figura 8) en la fase de integración, es (18).


Considerando vo=1V, iph, max=10 pA y tint.max=fb/2, se tiene un Ci de 200 fF. El proceso de integración se inicia después de un pulso de reinicio en Ci, generando una tensión de salida vr, enseguida inicia el tiempo de integración y la tensión final es directamente proporcional a iph como lo indica (18). El transistor M2 en el circuito de la figura 8 se utiliza para el control del tiempo de exposición, evita también la saturación del integrador. La tabla 4 resume las características del integrador.
Parámetros del circuito integrador
| Literal | Descripción | Magnitud |
|---|---|---|
| Ci | Capacitancia de integración | 200 fF |
| CL | Capacitancia de carga | ∼ 180 fF |
| Ce | Capacitancia de entrada | ∼ 20 fF |
| Rp | Resistencia de apagado de M7 | ∼ 100 GΩ |
| tint.max | Tiempo máximo de integración | 2 ms |
| iph, max | Fotocorriente máxima | 100 pA |
| Av | Ganancia de lazo abierto | 51.08 dB |
| BW | Ancho de banda (a -3dB) | 30.51 kHz |
| SR | Velocidad de respuesta | 4.24 V/μs |
| ISS | Corriente de polarización | 2μA |
El circuito se presenta en la figura 8 (sección cuantificador). Se trata de un comparador de alta ganancia operado por reloj, formado por un par diferencial con p-MOSFET. Cuando ocurre Φ2, la tensión de salida es Vthn, lo que representa un 0 lógico a su salida. Cuando se presenta Φ1 y si Vp>VREF, M17 queda en corte y M16 en la región triodo, así Vs=0V; por el contrario si Vp<VREF, se tiene VS=VCC. El error por desplazamiento (∼20mV) tiene poco efecto sobre la salida del modulador. El cuantificador se diseñó con ganancia lineal de voltaje de 150 y respuesta en frecuencia superior a 40kHz.
Diseño del convertidor digital/analógicoEl circuito DAC se implementó como el propuesto en Fowler et al. (1994), ya que es eficiente y utiliza solo tres n-MOSFET (figura 8) (sección convertidor digital/analógico). En la fase Φ2 se descarga Cr, y durante Φ1 se habilita. Si vo=0V la fotocorriente continúa integrándose, disminuyendo Vp, en caso contrario vo=VCC, la fotocorriente carga a Cr, incrementando Vp. La relación Cr/Ci determina la ganancia del integrador y es menor a 1 para garantizar estabilidad (Bourdopoulos et al., 2003).
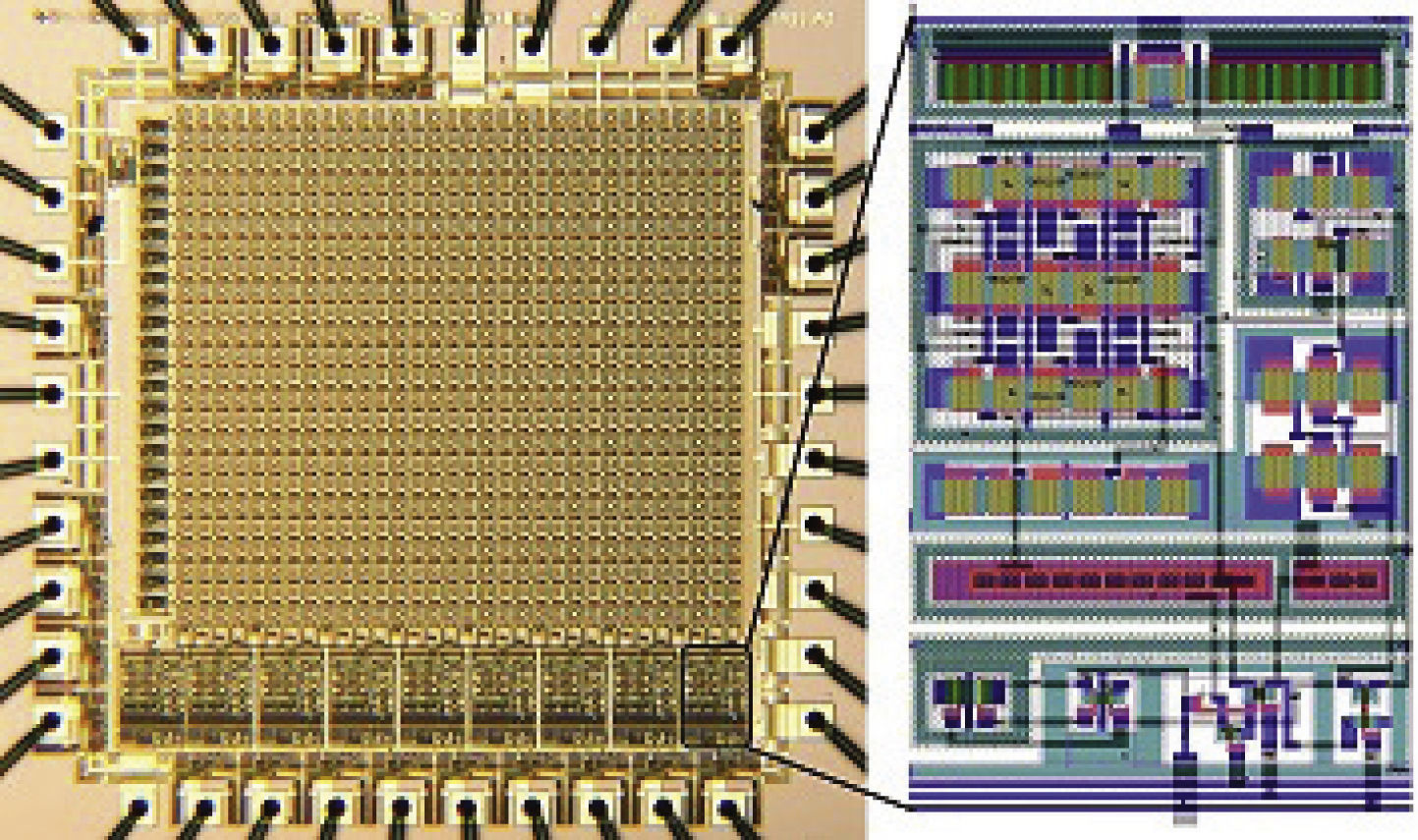
Implementación y mediciones del prototipo sensor de imagen CMOSEl sistema se implementó en tecnología CMOS estándar con dos capas de polisilicio y dos niveles de metal, λmin=1.2μm, además de seguir reglas de layout para sistemas de señal mixta. El metal 2 se utilizó como pantalla de luz. La figura 9 es una microfotografía del chip y el layout.
 CMOS.' title='Microfotografía del chip prototipo sensor de imagen
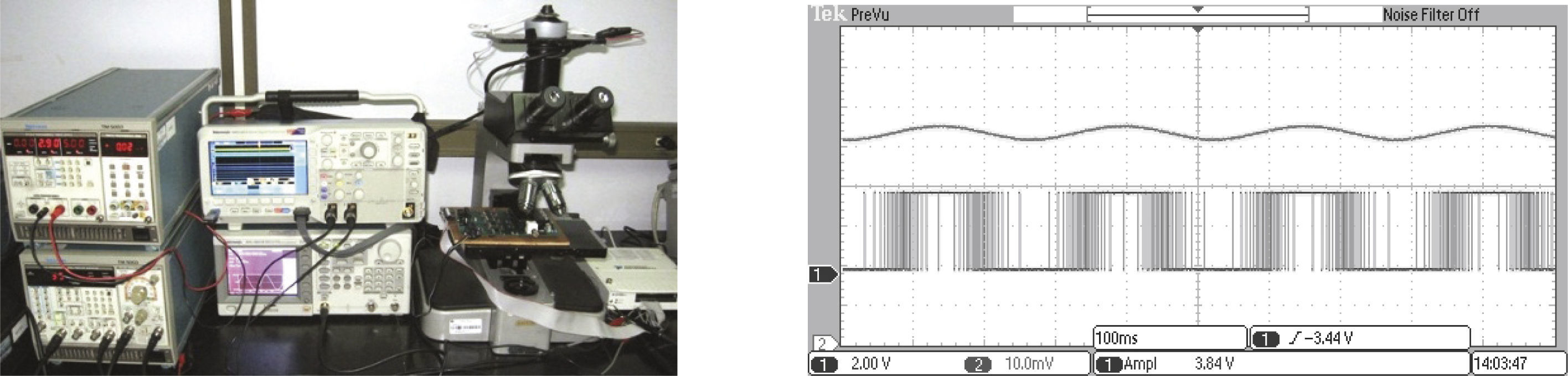
CMOS.' title='Microfotografía del chip prototipo sensor de imagen El sistema de medición se colocó sobre una base de microscopio como lo muestra la figura 10a. La fuente de luz (LED) se ubica en la parte superior. Entre la fuente de luz y la entrada del ocular se colocó una imagen impresa en acetato y se enfocó sobre la matriz de pixeles. El prototipo CMOS' alt='Sensor de imagen CMOS'>CIS
se colocó en una PCB diseñada para este fin. Los circuitos en la PCB acondicionan la polarización, la entrada de las fases Φ1 y Φ2, las entradas digitales para seleccionar la fila (reloj al registro de corrimiento) y el selector de columna (MUX analógico). Las salidas de los moduladores se capturaron con canales digitales de un osciloscopio digital, posteriormente, los datos se guardaron en dispositivos de almacenamiento extraíbles. Para realizar mediciones se seleccionó una frecuencia de muestreo de 32kHz e intensidades de luz, desde 1 mW/cm2 hasta 10 mW/cm2. sistema de medición y b) señales de entrada/salida del sistema de sensado.")
La figura 10b presenta una salida temporal, la señal superior corresponde a la tensión empleada en la polarización directa del LED, frecuencia de 3.3Hz y amplitud de 5mV. Con dicha amplitud se induce la mínima distorsión armónica en la luz emitida. La señal inferior es una salida de un modulador, como ya se adelantó desde la sección 3, se trata de una señal PCM cuya densidad de unos se incrementa con la máxima amplitud y con la mínima se incrementa la densidad de ceros.
Se realizaron capturas de 2 ciclos por modulador y se obtuvo la densidad espectral de potencia. Uno de esos resultados se muestra en la figura 8h, donde se adicionó la respuesta del modelo comportamental. La máxima SNR obtenida fue de 43.11dB, que representa una pérdida de 9dB respecto del modelo comportamental. Este resultado pone en evidencia que existe una importante contribución de componente de CD, distorsión armónica y ruido de fondo que no se consideraron en el modelo. La gran cantidad de ruido por CD lo induce la fuente de luz, ya que a nivel experimental es difícil encontrar un punto de polarización que coincida con el punto de polarización del integrador. Por otro lado, son evidentes los armónicos por arriba de la frecuencia de interés, dichos componentes contribuyen a la distorsión armónica total, y naturalmente se presentan en la respuesta de un modulador de este tipo (Webb, 2009).
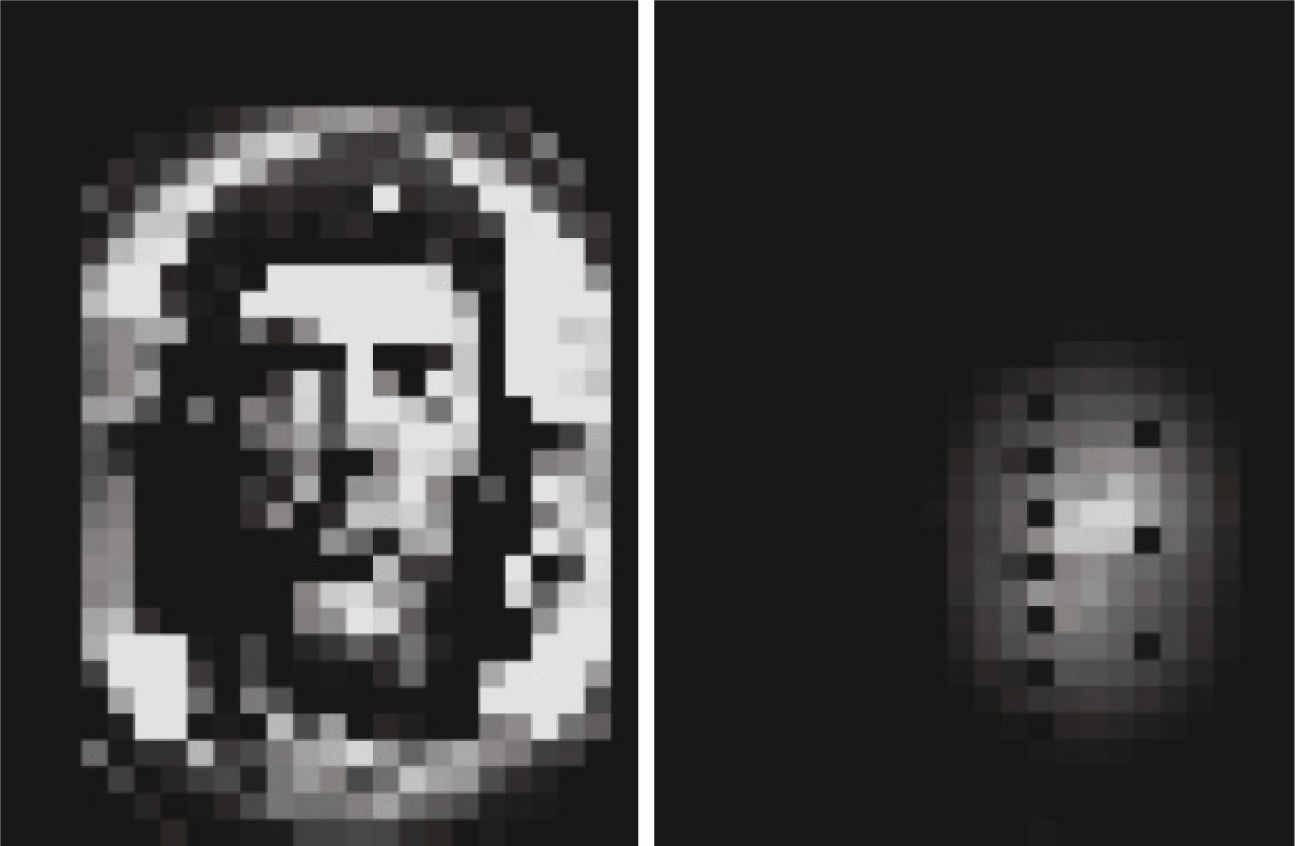
La salida digital de cada modulador se llevó a un decimador multietapa, dos etapas con filtros CIC (factor de decimación: 2) cada uno y dos etapas con filtros de rizo simétrico (factor de decimación: 4). Este proceso permitió recuperar la señal muestreada a 512Hz (fNy), con 8 bits. Al pasar cada salida de cada pixel por el filtro se puede correlacionar el nivel de salida digital con una escala de gris. Debido a que los niveles de salida de cada filtro garantizan 8 bits, es posible obtener hasta 28 niveles de gris. La figura 11 muestra dos ejemplos capturados con el prototipo CMOS' alt='Sensor de imagen CMOS'>CIS. Estos resultados muestran que las dimensiones de los pixeles y la técnica de layout se eligieron adecuadamente.
 CMOS, en a) fotografía del Che-Guevara y en b) Una captura de prueba de una fuente puntual de luz.' title='Imágenes fotografiadas con el prototipo sensor de imagen
CMOS, en a) fotografía del Che-Guevara y en b) Una captura de prueba de una fuente puntual de luz.' title='Imágenes fotografiadas con el prototipo sensor de imagen Este artículo presentó el diseño de un prototipo sensor de imagen CMOS de medianas prestaciones para fotografía digital. Los circuitos se diseñaron con base en un modelo comportamental temporal en tiempo discreto que incluye las principales fuentes de ruido originadas en la fuente de luz y los circuitos del sistema de sensado. Este último se implementó utilizando la técnica de sobremuestreo a través de un ΣΔM de 1er-orden y 1-bit, el cual desplaza el ruido de cuantificación fuera de la banda de interés. La señal de entrada es la fotocorriente proveniente de un pixel formado por un fotodiodo pozo-n/substrato-p. La arquitectura del ΣΔM incluye un integrador a capacitor conmutado de 1er-orden, cuantificador, y sistema de conversión A/D. Cada bloque del modulador es una fuente particular de ruido que afecta el desempeño global, en términos de SNR. Para alcanzar una SNR específica, se utilizaron modelos de nivel sistema y simulaciones en SIMULINK®. Los resultados de análisis de la PSD mostraron que las no-linealidades de la señal de entrada son la principal fuente de distorsión a bajas frecuencias y que las no idealidades del integrador, el ruido kT/C y la saturación del cuantificador son fuentes de ruido blanco. El modelo también se empleó para la optimización de bloques de nivel circuito. Los resultados de imágenes capturadas con el CMOS' alt='Sensor de imagen CMOS'>CIS
mostraron que el método de diseño por modelado comportamental y simulación de nivel sistema es una herramienta con alto grado de fiabilidad.Agradecemos al Consejo Nacional de Ciencia y Tecnología por el apoyo a esta investigación, a través del proyecto Núm. 082579.
Citación estilo Chicago
Citación estilo ISO 690
Sergio Garduza-González. Obtuvo el grado de maestro en ciencias en Cinvestav-IPN, Departamento de Ingeniería Eléctrica. Actualmente trabaja como profesor titular en la Academia de Electrónica en UPIITA-IPN. Entre sus temas de investigación se encuentran: convertidores analógico/digital por sobre-muestreo, diseño analógico en tecnología CMOS estándar, sensores de imagen CMOS, incluyendo desarrollo de métodos E-Learning para la educación superior.
Felipe Gómez-Castañeda. Obtuvo el grado de doctor en ciencias en Cinvestav-IPN, Departamento de Ingeniería Eléctrica. Actualmente es profesor titular del Departamento de Ingeniería Eléctrica, Cinvestav-IPN. Sus áreas de investigación son: diseño analógico de baja frecuencia, desarrollo de sistemas neuro-difusos en tecnología FPGA, sistemas adaptativos y uso de métodos de optimización basados en meta-heurística.
Víctor Hugo Ponce-Ponce. Obtuvo el grado de doctor en ciencias en Cinvestav-IPN, Departamento de Ingeniería Eléctrica. Actualmente está adscrito como investigador en el Laboratorio de micro-tecnología y sistemas embebidos del CIC-IPN. Sus áreas de interés son: diseño analógico de sistemas mixtos y sensores de imágenes CMOS.
José Antonio Moreno-Cadenas. Obtuvo el grado de doctor-ingeniero, Grenoble, Francia. Actualmente es profesor titular del Departamento de Ingeniería Eléctrica en Cinvestav-IPN. Sus áreas de investigación son: diseño analógico y mixto de sistemas en tecnología CMOS, desarrollo de sistemas neuro-difusos en tecnología FPGA, sistemas expertos basados en lógica difusa y uso de métodos de optimización para sistemas complejos.