
En las últimas décadas ha existido un especial interés por las teorías que podrían explicar el gobierno del control motor y sus aplicaciones. Estas teorías suelen basarse en modelos de función cerebral, reflejando criterios filosóficamente diferentes sobre la forma en la que el movimiento es controlado por el cerebro, enfatizando cada una de ellas en los distintos componentes neurales del movimiento. Asimismo, en el contexto de las neurociencias, toma relevancia el concepto de aprendizaje motor, considerado como el conjunto de procesos internos asociados a la práctica, y la experiencia, que producen cambios relativamente permanentes en la capacidad de producir actividades motoras, a través de una habilidad específica. Por lo que ambos, control y aprendizaje motor, se posicionan como campos de estudio fundamentales para los profesionales sanitarios en el campo de la neurorrehabilitación.
DesarrolloSe describen las principales teorías de control motor como la teoría de la programación motora, la teoría de sistemas, la teoría de la acción dinámica o la teoría del procesamiento de distribución en paralelo, así como los factores que influyen en el aprendizaje motor y sus aplicaciones en neurorrehabilitación.
ConclusionesEn la actualidad no existe un consenso sobre qué teoría o modelo es definitorio en dar explicación al gobierno del control motor. Las teorías sobre el aprendizaje motor deben ser la base para la rehabilitación motora. Las nuevas líneas de investigación deben aplicar los conocimientos generados en los campos del control y aprendizaje motor en neurorrehabilitación.
In recent decades there has been a special interest in theories that could explain the regulation of motor control, and their applications. These theories are often based on models of brain function, philosophically reflecting different criteria on how movement is controlled by the brain, each being emphasised in different neural components of the movement. The concept of motor learning, regarded as the set of internal processes associated with practice and experience that produce relatively permanent changes in the ability to produce motor activities through a specific skill, is also relevant in the context of neuroscience. Thus, both motor control and learning are seen as key fields of study for health professionals in the field of neuro-rehabilitation.
DevelopmentThe major theories of motor control are described, which include, motor programming theory, systems theory, the theory of dynamic action, and the theory of parallel distributed processing, as well as the factors that influence motor learning and its applications in neuro-rehabilitation.
ConclusionsAt present there is no consensus on which theory or model defines the regulations to explain motor control. Theories of motor learning should be the basis for motor rehabilitation. The new research should apply the knowledge generated in the fields of control and motor learning in neuro-rehabilitation.
El estudio de la causa y la naturaleza del movimiento resultan esenciales para la práctica médica. Recientemente ha surgido un especial interés por las nuevas teorías del control motor (CM) y su aplicación. Sin embargo, la distancia entre la teoría y los procedimientos terapéuticos empleados en las alteraciones del CM se ha visto incrementada debido a las nuevas investigaciones en el campo de las neurociencias, no existiendo una teoría única entre la comunidad científica sobre el CM1.
Los métodos específicos habitualmente empleados en neurorrehabilitación vienen pues determinados por las suposiciones fundamentales sobre la causa y la naturaleza del movimiento de forma que la teoría se constituye en la base teórica de la práctica médica2.
La neurorrehabilitación en términos generales tendrá como objeto el mantenimiento de las habilidades existentes, la readquisición de habilidades perdidas y el aprendizaje de nuevas destrezas. Existen diversos factores que, siendo significativos desde el punto de vista de la neurorrehabilitación, influyen en los procesos de aprendizaje motor, como las instrucciones verbales, características y variabilidad de la práctica, participación activa y motivación del individuo, la transferencia positiva/negativa del aprendizaje, el control postural, la memoria y el retroalimentación. Todos ellos son de aplicación clínica y son la base de las emergentes vías de investigación, así como de otras ya bien instauradas, en el reentrenamiento de la función sensitivo-motora del paciente neurológico.
El objetivo del presente trabajo es realizar un análisis crítico de las teorías y modelos de control motor y aprendizaje motor descritos, así como estudiar sus potenciales aplicaciones clínicas en el campo de la neurorrehabilitación, fundamentalmente en la readquisición del control postural y el equilibrio, la locomoción, el alcance, el agarre y la manipulación. Por último, se describen las posibilidades reales de las nuevas tecnologías de aplicación en la patología neurológica.
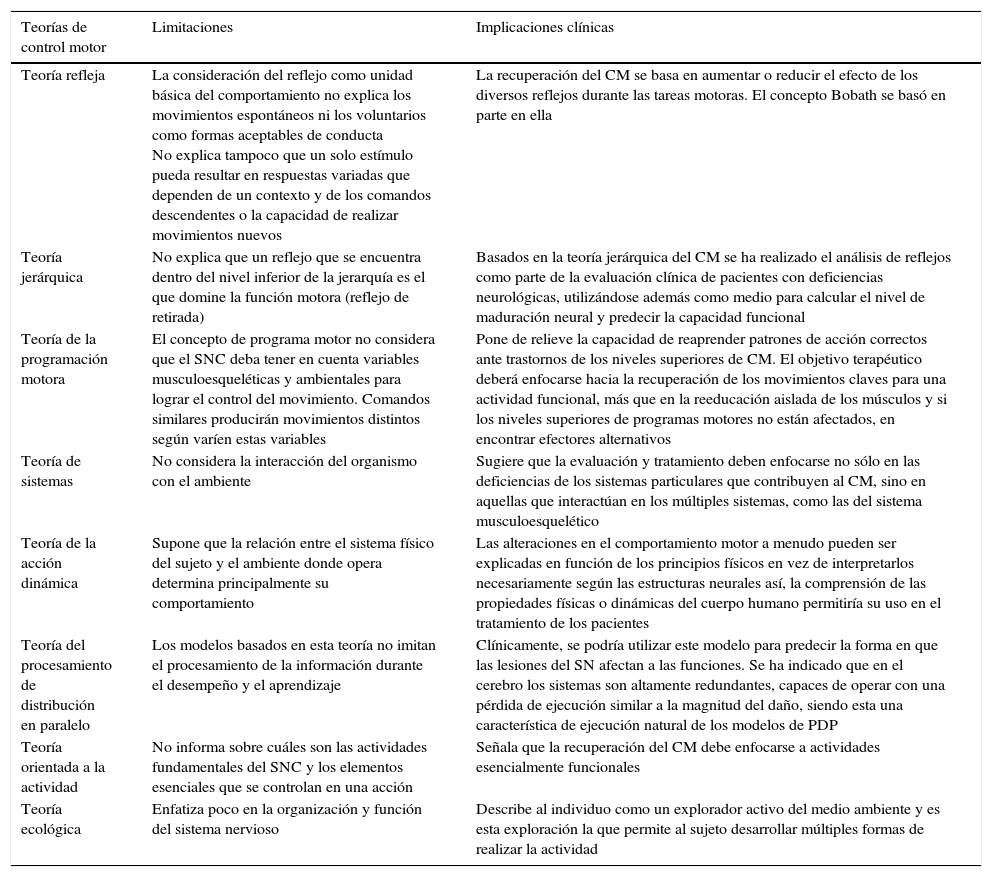
DesarrolloTeorías sobre el control motorLas diversas teorías sobre CM reflejan las concepciones existentes sobre la forma en la que el movimiento es controlado por el cerebro, enfatizando cada una de ellas en los distintos componentes neurales del movimiento1. Los métodos específicos usados en neurorrehabilitación vienen pues determinados por las suposiciones fundamentales sobre la causa y la naturaleza del movimiento de forma que la teoría se constituye en la base teórica de la práctica médica2, la cual se encargará de verificar o no dichas teorías3. Las principales limitaciones e implicaciones clínicas de las teorías sobre CM se muestran en la tabla 1.
Limitaciones de las teorías sobre el control motor
| Teorías de control motor | Limitaciones | Implicaciones clínicas |
|---|---|---|
| Teoría refleja | La consideración del reflejo como unidad básica del comportamiento no explica los movimientos espontáneos ni los voluntarios como formas aceptables de conducta No explica tampoco que un solo estímulo pueda resultar en respuestas variadas que dependen de un contexto y de los comandos descendentes o la capacidad de realizar movimientos nuevos | La recuperación del CM se basa en aumentar o reducir el efecto de los diversos reflejos durante las tareas motoras. El concepto Bobath se basó en parte en ella |
| Teoría jerárquica | No explica que un reflejo que se encuentra dentro del nivel inferior de la jerarquía es el que domine la función motora (reflejo de retirada) | Basados en la teoría jerárquica del CM se ha realizado el análisis de reflejos como parte de la evaluación clínica de pacientes con deficiencias neurológicas, utilizándose además como medio para calcular el nivel de maduración neural y predecir la capacidad funcional |
| Teoría de la programación motora | El concepto de programa motor no considera que el SNC deba tener en cuenta variables musculoesqueléticas y ambientales para lograr el control del movimiento. Comandos similares producirán movimientos distintos según varíen estas variables | Pone de relieve la capacidad de reaprender patrones de acción correctos ante trastornos de los niveles superiores de CM. El objetivo terapéutico deberá enfocarse hacia la recuperación de los movimientos claves para una actividad funcional, más que en la reeducación aislada de los músculos y si los niveles superiores de programas motores no están afectados, en encontrar efectores alternativos |
| Teoría de sistemas | No considera la interacción del organismo con el ambiente | Sugiere que la evaluación y tratamiento deben enfocarse no sólo en las deficiencias de los sistemas particulares que contribuyen al CM, sino en aquellas que interactúan en los múltiples sistemas, como las del sistema musculoesquelético |
| Teoría de la acción dinámica | Supone que la relación entre el sistema físico del sujeto y el ambiente donde opera determina principalmente su comportamiento | Las alteraciones en el comportamiento motor a menudo pueden ser explicadas en función de los principios físicos en vez de interpretarlos necesariamente según las estructuras neurales así, la comprensión de las propiedades físicas o dinámicas del cuerpo humano permitiría su uso en el tratamiento de los pacientes |
| Teoría del procesamiento de distribución en paralelo | Los modelos basados en esta teoría no imitan el procesamiento de la información durante el desempeño y el aprendizaje | Clínicamente, se podría utilizar este modelo para predecir la forma en que las lesiones del SN afectan a las funciones. Se ha indicado que en el cerebro los sistemas son altamente redundantes, capaces de operar con una pérdida de ejecución similar a la magnitud del daño, siendo esta una característica de ejecución natural de los modelos de PDP |
| Teoría orientada a la actividad | No informa sobre cuáles son las actividades fundamentales del SNC y los elementos esenciales que se controlan en una acción | Señala que la recuperación del CM debe enfocarse a actividades esencialmente funcionales |
| Teoría ecológica | Enfatiza poco en la organización y función del sistema nervioso | Describe al individuo como un explorador activo del medio ambiente y es esta exploración la que permite al sujeto desarrollar múltiples formas de realizar la actividad |
SNC: sistema nervioso central.
En 1906, el neurofisiólogo Sir Charles Sherrington sentó las bases de la teoría refleja del CM4, en la que los reflejos eran los componentes básicos del comportamiento complejo para lograr un objetivo común5. Describió este comportamiento en función de reflejos compuestos y su combinación sucesiva o encadenamiento6-14. Un estímulo produciría una respuesta, la cual se transformaría en el estímulo de la siguiente respuesta.
Teoría jerárquicaEsta teoría sostiene que el sistema nervioso central (SNC) se organiza de forma jerárquica, en áreas de asociación superiores, corteza motora y niveles espinales de función motora, y cada nivel superior ejerce control sobre el nivel menor, en una estricta jerarquía vertical, en la que las líneas de control no se cruzan y donde los niveles inferiores nunca ejercen dicho control3. En los años 40, Gesell15 y McGraw16 desarrollan la teoría de la neuromaduración del desarrollo. El desarrollo motor normal es atribuido a la creciente corticalización del SNC que produce la aparición de niveles superiores de control sobre los reflejos de nivel inferior, siendo la maduración del SNC el agente primario para el cambio en el desarrollo, minimizando la influencia de otros factores. La teoría jerárquica ha evolucionado, reconociéndose que cada nivel puede actuar sobre los otros dependiendo de la actividad, considerándose los reflejos no como único determinante del CM, sino solo uno de los diversos procesos esenciales para la generación y control del movimiento17.
Teorías de la programación motoraLas teorías más actuales acerca del CM se alejan de la idea de que sea un sistema fundamentalmente reactivo, habiendo comenzado a explorar la fisiología de las acciones en vez de la naturaleza de las reacciones. Se puede obtener una respuesta motora determinada tanto por un estímulo sensorial como por un proceso central en ausencia de un estímulo o impulso aferente, por lo que se debería hablar mejor de patrón motor central. Esta teoría, apoyada principalmente en el análisis de la locomoción en gatos18, sugiere que es posible el movimiento en ausencia de una acción refleja, de tal manera que la red espinal neural podría producir un ritmo locomotor sin estímulos sensoriales ni patrones descendentes del cerebro, pudiéndose realizar el movimiento sin retroalimentación3. Introduce el concepto de generadores de patrones centrales (GPC), circuitos neurales espinales específicos capaces de generar por sí mismos movimientos como el caminar y correr, y sobre los cuales los estímulos sensoriales entrantes ejercerían un importante papel modulador19-24.
Teoría de sistemasEsta teoría explica cómo no se puede entender el control neural del movimiento sin entender las características de los sistemas que se mueven. Afirma que «los movimientos no son dirigidos ni central ni periféricamente, sino que emergen de la interacción de muchos sistemas»25. Se considera al cuerpo como un sistema mecánico sujeto a fuerzas externas (gravedad) e internas19. Un mismo comando central puede ocasionar movimientos muy dispares debido a la interacción entre las fuerzas externas y las variaciones de las condiciones iniciales o bien, el mismo movimiento podría ser originado por comandos distintos. La teoría intenta explicar cómo afectan las condiciones iniciales las características del movimiento26.
Predice el comportamiento real mucho mejor que las teorías precedentes al considerar no solo los aportes del SN a la acción, sino también las contribuciones de diferentes sistemas así como las fuerzas de gravedad e inercia.
Teoría de la acción dinámicaDel estudio de las sinergias surge esta teoría que observa a la persona en movimiento desde una nueva perspectiva3. Considerando el principio de autoorganización, afirma que cuando un sistema de partes individuales se une, sus elementos se comportan colectivamente en forma ordenada, no siendo necesario un centro superior que envíe las instrucciones para lograr la acción coordinada27,28. Propone que el movimiento surge como resultado de elementos que interactúan, sin la necesidad de programas motores. Esta acción dinámica trata de encontrar descripciones matemáticas de estos sistemas autoorganizados que seguirían un comportamiento no lineal, situación en la cual, cuando uno de los parámetros se altera y alcanza un valor crítico, el sistema entra en un patrón de comportamiento completamente nuevo. A través de estas formulaciones matemáticas sería posible predecir las formas en que un sistema dado actuará en diferentes situaciones. La perspectiva de la acción dinámica reduce la importancia de las nociones de comandos provenientes del SNC para controlar el movimiento y busca explicaciones físicas que también puedan contribuir a las características del movimiento.
Teoría del procesamiento de distribución en paraleloLa teoría del procesamiento de distribución en paralelo (PDP) describe la forma en que el SN procesa la información para actuar. El SN operaría tanto mediante procesos en serie (procesando la información a través de una vía única), como en paralelo, interpretando la información por medio de vías múltiples que la analizarían simultáneamente en diferentes formas. El supuesto fundamental es que el cerebro es un ordenador con células que interactúan en diversas formas y las redes neuronales son los sistemas computacionales esenciales del cerebro29,30. La estrategia ha sido desarrollar modelos matemáticos simplificados de sistemas cerebrales y posteriormente estudiar estos para comprender la manera en que varios problemas de cálculo pueden ser resueltos por tales mecanismos29-31. Los modelos consisten en elementos que están conectados por circuitos. Al igual que las sinapsis neurales, cada elemento puede ser afectado por los otros de forma positiva o negativa en distinta magnitud. Estos elementos se distribuirían en neuronas sensoriales, interneuronas y motoras. La eficiencia del desempeño dependerá de la cantidad de conexiones de salida y la fortaleza de la conexión3.
Teoría orientada a la actividadGreene32 indicó la necesidad de una teoría que explicase cómo los circuitos neuronales operaban para lograr una acción, lo que proporcionaría la base para una imagen más coherente del sistema motor. El método orientado a la actividad se apoya en el reconocimiento de que el objetivo del CM es el dominio del movimiento para realizar una acción particular, no para efectuar movimientos por el solo hecho de moverse. El control del movimiento se organizaría alrededor de comportamientos funcionales dirigidos a objetivos3.
Teoría ecológicaEn los años sesenta, Gibson33 explora la forma en que nuestros sistemas motores nos permiten interactuar más efectivamente con el medio ambiente a fin de tener un comportamiento orientado al objetivo. Su investigación se centró en cómo detectamos la información del entorno pertinente para nuestras acciones y cómo la utilizamos para controlar nuestros movimientos34. El individuo explora activamente su entorno, el cual, a su vez, sostiene la actividad del individuo, de tal manera que las acciones están orientadas al ambiente.
Aprendizaje motorEl aprendizaje motor (AM) se define como el conjunto de procesos internos asociados a la práctica y la experiencia, que producen cambios relativamente permanentes en la capacidad de producir actividades motoras, a través de una habilidad específica. Lo que aprendemos se retiene o almacena en nuestro cerebro y constituye lo que denominamos memoria35,36, no considerándose como aprendizaje las modificaciones a corto plazo37-39.
La neurorrehabilitación tendrá como objeto el mantenimiento de las habilidades existentes, la readquisición de habilidades perdidas y el aprendizaje de nuevas destrezas. Se considera generalmente que una habilidad es una característica o rasgo relativamente estable, típicamente asociado a un componente genético y que no puede alterarse fácilmente mediante la práctica o la experiencia40. Otra manera de entender el concepto de habilidad es distinguiéndolo del de destreza. Al contrario que la primera, la destreza puede ser modificada mediante la práctica o la experiencia, de hecho, y de igual modo, puede ser adquirida a través de estas41,42.
Muchos factores influyen en el AM, como la edad, la raza, la cultura o la predisposición genética. Cada persona posee sus destrezas como resultado del proceso de su aprendizaje43.
Teorías sobre el aprendizaje motorModelo de los tres estadios de Fitts y Posner37,38. Estos autores sugieren que existen tres etapas principales en el AM.
En la etapa cognitiva el paciente aprende una nueva destreza o reaprende una antigua. El individuo necesita practicar con frecuencia una tarea bajo supervisión y guía externa, siendo importante el cometer errores y saber corregirlos. En la etapa asociativa el paciente consigue dirigir el programa dentro de restricciones ambientales específicas. Disminuirá el número de errores en la actividad y logrará realizar con menor esfuerzo la ejecución de la tarea. Los individuos comienzan a comprender como se interrelacionan los diferentes componentes de la destreza. En la etapa autónoma el paciente consigue moverse dentro de una variedad de ambientes, manteniendo el control en todo el programa. El verdadero sello del aprendizaje es la capacidad de retener la destreza y generalizarla a diferentes contextos gracias a la automatización, puesto que la práctica en la vida cotidiana es generalmente aleatoria38.
Modelo de sistema de tres fases de Berstein. Según esta teoría, el énfasis está en controlar los grados de libertad, es decir, el número independiente de movimientos necesarios para completar una acción, como un componente central del aprendizaje de una nueva destreza motora. Este modelo de aprendizaje plantea tres fases. En la fase inicial, el individuo simplifica el movimiento reduciendo los grados de libertad. En la fase avanzada el sujeto comienza a ganar ciertos grados de libertad, permitiendo el movimiento en mayor número de articulaciones incluidas en la tarea. Y, por último, la fase experto es aquella en la que el individuo posee todos los grados de libertad necesarios para llevar a cabo la tarea, con la mayor efectividad y de manera coordinada.
Modelo de dos fases de Gentile. La primera fase incluye la comprensión del objetivo de la tarea, el desarrollo de las estrategias de movimiento apropiadas para conseguir el objetivo, así como la interpretación de las características del entorno críticas para la organización del movimiento. En la segunda fase, denominada de fijación o fase de diversificación, el objetivo del sujeto es redefinir el movimiento, lo cual incluye tanto el desarrollo de la capacidad de adaptar el movimiento a los cambios de la tarea y del entorno, como desarrollar la tarea consistente y eficientemente.
Fases en la formación del programa motor. Diversos investigadores se han planteado qué cambios jerárquicos podrían ocurrir en el control del movimiento cuando los programas motores se unen durante el aprendizaje de una nueva tarea40. Los programas motores que rigen una conducta compleja podrían ser creados a través de la combinación de programas motores que controlan unidades más pequeñas de la conducta, hasta completar el control total de ésta como una sola unidad40.
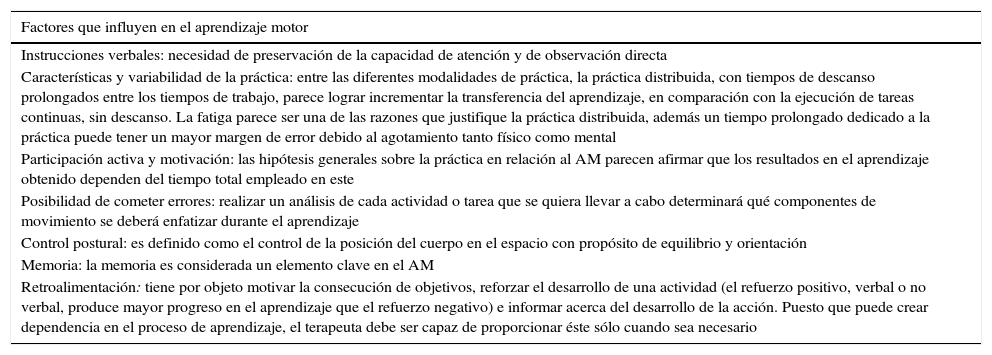
Factores que influyen en el aprendizaje motorExisten diversos factores que influyen en los procesos de AM, como las instrucciones verbales, las características y la variabilidad de la práctica, la participación activa y la motivación del individuo, la posibilidad de cometer errores, el control postural, la memoria y el retroalimentación (tabla 2).
Aprendizaje motor
| Factores que influyen en el aprendizaje motor |
|---|
| Instrucciones verbales: necesidad de preservación de la capacidad de atención y de observación directa |
| Características y variabilidad de la práctica: entre las diferentes modalidades de práctica, la práctica distribuida, con tiempos de descanso prolongados entre los tiempos de trabajo, parece lograr incrementar la transferencia del aprendizaje, en comparación con la ejecución de tareas continuas, sin descanso. La fatiga parece ser una de las razones que justifique la práctica distribuida, además un tiempo prolongado dedicado a la práctica puede tener un mayor margen de error debido al agotamiento tanto físico como mental |
| Participación activa y motivación: las hipótesis generales sobre la práctica en relación al AM parecen afirmar que los resultados en el aprendizaje obtenido dependen del tiempo total empleado en este |
| Posibilidad de cometer errores: realizar un análisis de cada actividad o tarea que se quiera llevar a cabo determinará qué componentes de movimiento se deberá enfatizar durante el aprendizaje |
| Control postural: es definido como el control de la posición del cuerpo en el espacio con propósito de equilibrio y orientación |
| Memoria: la memoria es considerada un elemento clave en el AM |
| Retroalimentación: tiene por objeto motivar la consecución de objetivos, reforzar el desarrollo de una actividad (el refuerzo positivo, verbal o no verbal, produce mayor progreso en el aprendizaje que el refuerzo negativo) e informar acerca del desarrollo de la acción. Puesto que puede crear dependencia en el proceso de aprendizaje, el terapeuta debe ser capaz de proporcionar éste sólo cuando sea necesario |
Las instrucciones verbales facilitan a la persona que centre su atención en determinados objetivos y condicionan las estrategias de aprendizaje que vaya a emplear a la hora de realizar un movimiento38,44. En cuanto a las características y variabilidad de la práctica, resulta relevante plantear una tarea que conlleve repetición, teniendo en cuenta el concepto de «repetir sin repetir», es decir, la práctica debe tener un control de los parámetros que se han ido modificando, pues debe suponer un reto para el paciente y ser extrapolable a diferentes entornos y situaciones. En aquellos casos en los que la práctica física no sea posible, se ha sugerido que la práctica mental es una forma efectiva de estimular el aprendizaje45. El aprendizaje puede ser facilitado o interrumpido por el contexto. Diferentes contextos producirán un mayor desarrollo del aprendizaje, resultando ser este más general y enriquecedor. Por esta razón, la práctica en el entorno clínico debe incluir condiciones variables, con el fin de que el aprendizaje pueda ser transferido a diversas situaciones cambiantes. De manera que la cantidad de transferencia depende de la similitud ente el entorno clínico y el entorno real46.
Otro de los conceptos importantes relacionado con el AM es la participación activa del paciente en la tarea que se debe desarrollar. La motivación e implicación del mismo es crucial para la ejecución de la tarea o actividad, la resolución y superación del problema. La participación activa realza el procesamiento del aprendizaje y ayuda a mantener una continuidad del mismo.
La posibilidad de cometer errores durante la ejecución de una nueva actividad, así como reportar al paciente posibles soluciones o fomentar a que él mismo las proponga, supone un añadido en el trabajo del AM de nuevas destrezas38. Un correcto control postural47,48, así como un adecuado estado de la memoria, son importantes en el proceso de aprendizaje de un nuevo acto motor o en la readquisición del mismo49.
Llamamos retroalimentación a la información que surge como resultado del movimiento (tabla 3). Podemos distinguir entre retroalimentación intrínseco, como consecuencia del movimiento que se produce (vía exteroceptiva y propioceptiva) que permite ajustes posturales; y retroalimentación extrínseco, considerado como toda información proporcionada por una fuente externa. Su objetivo es comunicar información al paciente sobre el resultado del movimiento ejecutado, completando la información intrínseca. Existen dos categorías dentro de este, el conocimiento de resultados, considerado como toda información verbal sobre el resultado de la acción y de especial importancia cuando el retroalimentación intrínseco está disminuido, y el conocimiento de ejecución que se relaciona con los patrones de movimiento para conseguir una tarea e informa sobre la calidad de sus movimientos50,51. El retroalimentación extrínseco es esencial cuando el origen del retroalimentación intrínseco de una persona está disminuido o distorsionado, frecuente en pacientes con deterioro neurológico. Durante cualquier proceso de aprendizaje, el sujeto debe recibir algún tipo de información sobre el error desde la fuente intrínseca o extrínseca. Las características del retroalimentación extrínseco, las cuales potencian las habilidades cognitivas del paciente, se resumen en la tabla 3.
Retroalimentación extrínseco
| Proporciona información acerca del progreso individual en el aprendizaje de la actividad, lo cual favorece la motivación |
| Proporciona información de las partes que componen la acción, lo que permite al individuo realizar una representación mental de la actividad, así como interpretar sus posibilidades acerca de la consecución de los objetivos |
| Proporciona refuerzo positivo, cuando se transmite al sujeto información acerca de la correcta ejecución de las tareas. Esto tiene un efecto inmediato sobre la motivación del individuo, así como sobre la atención y la concentración dedicada a la tarea |
| El retroalimentación reiterado sobre corrección de errores puede generar dependencia y evitar que el sujeto experimente y evalúe por sí mismo las características de su acción. Para evitar la dependencia, el retroalimentación sólo debe otorgarse cuando sea necesario, en función de la complejidad de las tareas y la experiencia del individuo. Por lo tanto, el refuerzo debe ser intermitente, evitando producir retroalimentación en cada ejecución |
Los niños usan el retroalimentación de distinto modo a los adultos, pues estos se benefician más de un retroalimentación reducido, mientras que los niños requieren un retroalimentación más continuo pero menos preciso. El retroalimentación reducido incrementa el esfuerzo cognitivo del sujeto, ya que cuando el retroalimentación es ocultado, la persona necesita atender e interpretar la información intrínseca como resultado de la habilidad desempeñada. Este incremento del esfuerzo cognitivo propicia el cambio óptimo en los adultos, potenciando el AM, lo que no ocurre en los niños. Estos requieren un mayor número ensayos prácticos con retroalimentación para formar una representación más precisa y estable de la tarea; Posteriormente, el retroalimentación se debe reducir progresivamente para estimular el esfuerzo cognitivo y el AM. La capacidad de un sujeto para procesar la información y atender a la información intrínseca derivada de la tarea, condiciona el refuerzo extrínseco otorgado50,51.
Aplicaciones clínicas de las teorías del control y aprendizaje motor en neurorrehabilitaciónDebe existir una transferencia continua del conocimiento científico a la práctica clínica para proponer nuevas estrategias terapéuticas que refuercen y fortalezcan las ya existentes. Por razones metodológicas se describirán por separado las estrategias terapéuticas encaminadas a recuperar o mejorar las capacidades de control postural y equilibrio, de la locomoción y de la manipulación.
Control postural y equilibrioLa literatura parece mostrar52-56 que el ejercicio físico es una forma efectiva de mejorar el equilibrio en los pacientes neurológicos, y estas mejoras podrían potencialmente mejorar la funcionalidad y reducir el número de caídas. La efectividad de estos programas depende de la inclusión de ejercicios multidimensionales más que los que se dirigen a un solo aspecto57. A esta forma de trabajo tradicional, se han añadido nuevas metodologías, de forma paralela, con una concepción más global, como son el Tai Chi58,59, el entrenamiento sensorial60 y el entrenamiento en tarea doble (tarea motora más cognitiva)61. En la actualidad, existe evidencia científica de la utilidad de los sistemas instrumentados, como la posturografía dinámica computarizada. Se están desarrollando estudios en los que se intenta demostrar que dichos sistemas son también válidos como herramienta de reentrenamiento62.
LocomociónLa intervención tiene como objetivo la optimización de la marcha mediante la prevención del acortamiento de los tejidos blandos, el aumento de la fuerza y del control muscular y el entrenamiento del ritmo y coordinación. Esto se consigue mediante la combinación de ejercicios de estiramientos, de fuerza, de carga y práctica de la marcha63.
Tradicionalmente, la terapia de fortalecimiento se realizaba de forma manual mediante ejercicios contra resistencia o mediante la aplicación de sistemas de suspensión y poleas, utilizando muelles y pesos. Técnicas basadas en el concepto Bobath64 o en la facilitación neuromuscular propioceptiva65 siguen utilizándose; sin embargo, existen pocos trabajos sobre la efectividad de estas técnicas. En la actualidad, la metodología es algo más sofisticada, y va desde la utilización de bandas elásticas a ejercicios instrumentales realizados con equipos isocinéticos, pasando por estimulación eléctrica. Si bien se ha comprobado que el fortalecimiento de un músculo o grupo muscular produce aumento de la fuerza, no existe evidencia de una correlación en el aumento de la función; es necesario entrenar las sinergias requeridas para caminar en cadena cerrada, de forma repetida, con frecuencia y bajo diferentes condiciones ambientales y de velocidad.
Carr y Shepherd66 describen un programa de reaprendizaje motor en el ictus, basado en la práctica de tareas funcionales concretas. Basado en este concepto, parece apropiada la utilización, de forma precoz, de recursos tales como una pista de marcha (cinta sin fin)67,68 con soporte parcial del peso corporal, que puede combinarse con la electroestimulación eléctrica funcional (EEF) durante el entrenamiento69 o la asistencia robotizada70.
El reentrenamiento sensorial es una forma de implementar los beneficios de las terapias citadas. Existen estudios en los que se observa una mejora del equilibrio dinámico, en pacientes cuyo programa de ejercicios incluyen modificaciones sensoriales71. El uso del retroalimentación72,73 en programas de tratamiento ayuda al paciente a mejorar la capacidad de percepción del movimiento y supone un estímulo eficaz para mejorar la ejecución de la tarea.
Alcance, agarre y manipulaciónAunque el objetivo final de cualquier planteamiento terapéutico para el miembro superior será recuperar la función perdida o buscar compensaciones, podemos clasificar las intervenciones en aquellas que se focalizan en las deficiencias, las que tratan de recuperar la función y las que proponen la práctica de la tarea concreta.
Intervenciones dirigidas a las deficienciasPara la reeducación de deficiencias motoras, se han utilizado diversos programas de ejercicios activos, pasivos, contra resistencias progresivas y sistemas isocinéticos74,75, de liberación miofascial76 o el Tai Chi. Para tratar la rigidez y el acortamiento de estructuras se emplean yesos, férulas y ortesis. El bio-retroalimentación y la EEF ayudan a reclutar músculos paréticos. Respecto de la reeducación sensorial, Byl et al.77,78 encontraron mejorías del 20% en la independencia funcional, en la actividad motora fina, en la discriminación sensorial y en el desempeño musculoesquelético.
Estrategias dirigidas a recuperar la función vía entrenamiento del movimientoStoikov et al.79 usaron actividades posturales para mejorar la función prensil del miembro superior atáxico y encontraron mejorías significativas tras un programa de 4 semanas de duración. Otro ejemplo interesante es el programa para pacientes con disfunción vestibular propuesto por Herdman80.
Desde los años setenta se han desarrollado diversas técnicas de facilitación del movimiento activo usando objetos reales y entrenando varias posibilidades de alcance y agarre con ejercicios de progresiva dificultad que impliquen distintas formas de manipulación81-83. Rhoda Erhardt, terapeuta ocupacional, publicó de manera detallada el desarrollo de la secuencia para la suelta de objetos84.
Práctica orientada al desempeño de la tareaDun et al.85 desarrollaron un marco terapéutico basado en la teoría ecológica. Para mejorar la función es importante realizar la práctica de la tarea en sí misma, entrenando de esta manera, diversas actividades de la vida diaria86,87.
Se han publicado multitud de estudios con resultados prometedores de mejora de la función del miembro superior, mediante la terapia por restricción del movimiento del lado sano (TRMLS). Sin embargo, una revisión sistemática reciente88 en niños con hemiplejía solicita precaución ante su uso generalizado, aconsejando la realización de un mayor número de estudios con buen diseño metodológico. Asimismo, la revisión sistemática realizada por Langhorne, Coupar y Pollock parece indicar que la TRMLS produce beneficios clínicos en la función del brazo, no siendo tan claros para la mano en los pacientes con ictus89. El entrenamiento bilateral o bimanual en pacientes con hemiplejía se ha comprobado que mejora la coordinación entre ambas manos y también de forma aislada, en el lado afectado90,91. El tratamiento bimanual entra en contradicción de manera frontal con la TRMLS. Pero es posible que ambos tratamientos tengan cabida: el tratamiento bilateral en etapas precoces tras el ictus, para generar nuevas redes de reorganización del córtex y la TRMLS en fases más crónicas, para la recuperación de redes en desuso.
Aplicación de la estimulación eléctrica neuromuscularEstas aplicaciones funcionales se refieren a la activación de músculos paralizados en una secuencia y magnitud precisa para llevar a cabo directamente las tareas funcionales. De ahí el concepto de neuroprótesis, cuya aplicación permite sustituir la función motora del miembro superior e inferior para las tareas de autocuidado y la movilidad, la función de la vejiga y el control respiratorio92.
Bio-retroalimentación y realidad virtualLa terapia de biorretroalimentación orientada a tareas es ampliamente eficaz. La tecnología, llamada realidad virtual (VR), ofrece experiencias de la vida real, mejorando los resultados de los métodos clásicos de bio-retroalimentación. Sin embargo, los verdaderos beneficios terapéuticos de estos sistemas aún no se han probado por ensayos clínicos bien diseñados93.
Interfaz cerebro-ordenadorEstos aparatos se conocen como brain computer interfaces (BMI). Existen estudios que intentan mejorar el conocimiento de la fisiología cortical que sostiene la intención humana y proporcionar señales para un control más complejo derivado de la señal cerebral. En una reciente revisión94 los autores recogen el estado actual de BCI y detallan los estudios emergentes dirigidos a aumentar las aplicaciones clínicas futuras.
Aplicación de robótica en la neurorrehabilitaciónUna revisión sistemática publicada recientemente95 no encontró ningún efecto global significativo a favor de la terapia asistida por robot en la función del miembro superior y en las AVD en pacientes tras ictus, mas sí se observó una mejoría significativa en la parte proximal de la extremidad. En cuanto al empleo de sistemas robóticos para la mejora de la marcha de pacientes neurológicos, uno de los sistemas más conocidos es el Lokomat, dispositivo ortésico que simula y reproduce la marcha fisiológica del individuo, el cual ha sido objeto de diversas publicaciones científicas que parecen avalar sus resultados96,97.
ConclusionesEn la actualidad no existe un consenso sobre qué teoría o modelo es definitorio en dar explicación al gobierno del CM. Las teorías sobre el aprendizaje motor deben ser la base para la rehabilitación motora. Estudios con buen diseño metodológico han evidenciado que el trasladar los hitos terapéuticos alcanzados en el paciente neurológico, a contextos relacionados con el sujeto, añadiendo variabilidad, participación activa, dando al paciente la posibilidad de cometer errores, otorgando retroalimentación e incentivando la motivación, como aspectos fundamentales en la disminución de los déficits funcionales en el paciente neurológico. Por lo que líneas de investigación, mediante aplicación de estos conceptos, pueden ser interesantes en el uso de nuevos métodos y tecnologías en neurorrehabilitación.
FinanciaciónEl presente estudio se ha realizado dentro de proyecto de investigación «Dispositivos híbridos neuroprotésicos y neurorrobóticos para compensación funcional y rehabilitación de trastornos del movimiento (HYPER)», del programa CONSOLIDER-INGENIO 2010. Convocatoria 2009 del Ministerio de Ciencia e Innovación. IP: José Luis Pons Rovira. Instituto de Automática Industrial del Consejo Superior de Investigaciones Científicas (CSIC).
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.