









El presente estudio de casos revela los avances tecnológicos en el tratamiento de las fracturas de mano realizados por el grupo de investigación F-CIBER-HAND en Manizales, Colombia; integra la intervención quirúrgica practicada por el cirujano ortopedista de mano, la movilización temprana indicada por Fisiatría, la rehabilitación convencional por fisioterapeuta especializada en Ortopedia y Traumatología, y la terapia de movilización pasiva mediante ortesis robóticas.
Materiales y métodosSe seleccionaron cuatro pacientes: paciente con fractura intraarticular compleja de la cabeza del quinto metacarpiano de la mano derecha; paciente con fractura conminuta de la base del cuarto metacarpiano de la mano izquierda; paciente con fractura diafisiaria del quinto metacarpiano de la mano derecha, y paciente con fractura subcapital del segundo metacarpiano de la mano izquierda, los cuales fueron tratados de acuerdo con los cuatro momentos terapéuticos descritos, con seguimiento de su evolución clínica individual.
ResultadosEn todos los pacientes se ponen de manifiesto la recuperación funcional de la mano según la Escala de Discapacidades del Hombro, el Codo y la Mano (DASH), la disminución de la intensidad del dolor según la Escala Visual Análoga del Dolor (EVA) y la recuperación del arco de movilidad articular; además, todos los pacientes retornaron a las actividades de la vida diaria y laborales.
DiscusiónSe concluye que con el manejo quirúrgico especializado y la rehabilitación temprana complementada con ortesis robóticas, se mejoró la funcionalidad de la mano, disminuyó el dolor, hubo ganancia del arco articular y reinserción a las actividades cotidianas. El propósito del estudio es generar evidencia clínica de que el manejo interdisciplinario especializado y el uso de ortesis robóticas mejora la condición clínica de los pacientes con fracturas de la mano.
Nivel de evidencia clínica nivelIV.
The present cases study reveals technological advances in the treatment of hand fractures performed by the F-CIBER-HAND research group in Manizales - Colombia, integrating the surgical intervention by Hand Orthopedic Surgeon, early mobilization Indicated by Physiatry, the conventional rehabilitation by Physiotherapist specialized in Orthopedics and Traumatology, and passive mobilization therapy whit robotic orthoses.
Materials and methodsFour patients were selected: patient with complex intra-articular fracture in the head of the 5th right metacarpal, patient with a fracture in the base of the 4th left metacarpal, patient with diaphyseal fracture of the 5th right metacarpal, and patient with subcapital fracture of the 2nd left metacarpal, who were treated according to the four therapeutic moments described, with follow-up of their individual clinical evolution.
ResultsIn all patients was evident functional recovery of the hand according to the DASH scale, decrease of pain intensity according to analogous visual scale, and recovery of the joint mobility arc. In addition, all the patients returned satisfactorily to the daily life activities and jobs.
DiscussionIt was concluded that with specialized surgical management and early rehabilitation complemented with robotic orthoses, the functionality of the hand was improved, pain decreased, there was gain of the articular arch and reinsertion to daily activities. The purpose of the study is to generate clinical evidence that specialized interdisciplinary management and the use of robotic orthoses improve the clinical condition of patients with hand fractures.
Evidence levelIV.
Las fracturas de los metacarpianos y las falanges de la mano son una causa frecuente de consulta en los servicios de urgencias médicas y están relacionadas con diferentes tipos de traumatismo (caídas, accidentes laborales, accidentes de tránsito y actos violentos). Las fracturas de los metacarpianos y las falanges representan el 10% de las todas las fracturas y, aproximadamente, el 70% se produce entre las edades de 11 y 45 años1.
La incidencia estimada de fracturas de metacarpianos y falanges en la atención de urgencias medicas en Estados Unidos es de 13,6 por cada 100.000 personas-año2. En la ciudad de Manizales (Colombia), en el año 2014 hubo una incidencia de 30 casos por cada 100.000 personas-año3.
En Estados Unidos, las lesiones de la mano y de la muñeca cuestan anualmente 740 millones de dólares y ocupan el primer lugar en el orden de los tipos de lesiones más caras, pues superan a las lesiones de rodilla, cadera y traumatismo craneoencefálico. Las lesiones de mano exclusivamente cuestan al año 278 millones de dólares, de los cuales los costos de productividad contribuyen al 56% de los costos totales y son mayores que los costos directos de atención en salud4.
El tratamiento no quirúrgico de estas fracturas es apropiado en muchos casos. Sin embargo, puede conducir a complicaciones y comprometer gravemente la función de la mano5. El tratamiento quirúrgico es complejo y tiene unas indicaciones específicas, está orientado a obtener la consolidación de la fractura, conseguir una apropiada reducción de la superficie articular, evitar angulaciones y rotaciones que originan déficit motor, y permitir la movilización precoz6–8.
Con la rehabilitación se trata de evitar la aparición de discapacidad o el incremento de esta y lograr la mayor adaptación posible; para ello es muy importante que, durante la rehabilitación, el paciente colabore de manera responsable. Los objetivos de la rehabilitación de la mano son: controlar el dolor; disminuir la inflamación de los tejidos blandos; proporcionar apoyo a la fractura en curación; restaurar el movimiento, la fuerza y función, y permitir el regreso a las actividades de la vida diaria9.
Se han usado diferentes modalidades para tratar o prevenir las contracturas, entre las cuales pueden citarse técnicas de movilización articular, ferulaje o combinaciones, sin que alguna técnica sea superior a las otras10,11. Con objeto de mantener o restaurar el rango de movimiento articular, se han diseñado instrumentos para mejorar el proceso de rehabilitación, como son los dispositivos para estiramiento mecánico y los de movimiento continuo pasivo, para lograr una movilización frecuente y consistente, en condiciones controladas, tanto a nivel institucional como en el hogar12–15.
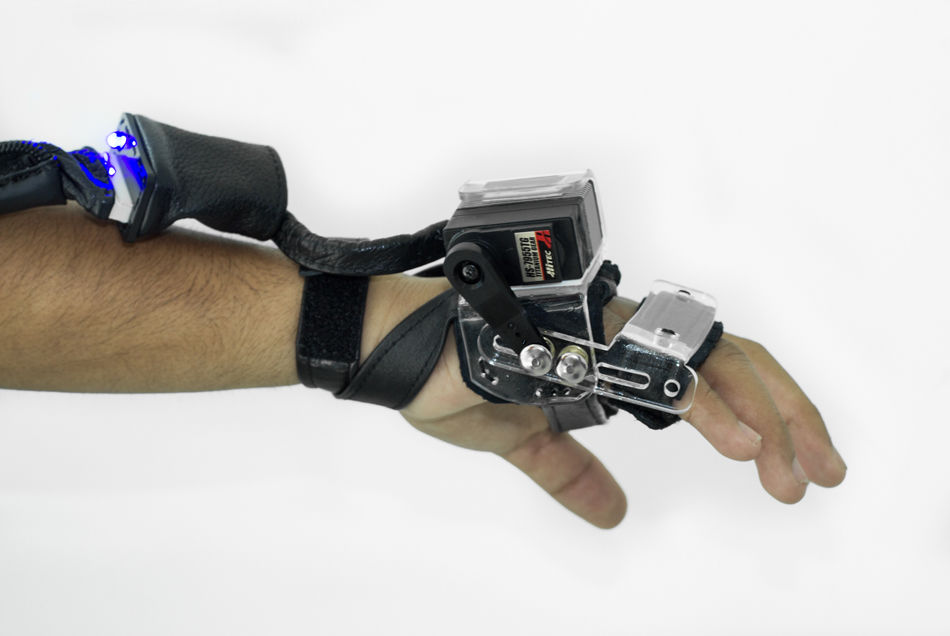
Materiales y métodosEste estudio de casos realizado en la ciudad de Manizales (Colombia) utiliza el Prototipo Exoesqueleto de Mano y Muñeca EMMRA-1 y la Ortesis Robótica de Rehabilitación Pasiva PRO-Dix. El exoesqueleto y las ortesis robóticas cuentan con tres interfaces: ortesis-piel (guante de cuero y neopreno), ortesis pasiva (piezas de acrílico articuladas) y ortesis activa (servomotores). El controlador de los dispositivos biomédicos permite al terapeuta graduar manualmente el ángulo, torque y tiempo de giro del servomotor para incrementar de forma progresiva el arco, la velocidad y la fuerza del movimiento articular según la tolerancia del paciente.
Se seleccionaron cuatro pacientes: paciente con fractura intraarticular compleja de la cabeza del quinto metacarpiano de la mano derecha; paciente con fractura conminuta de la base del cuarto metacarpiano de la mano izquierda; paciente con fractura diafisiaria del quinto metacarpiano de la mano derecha, y paciente con fractura subcapital del segundo metacarpiano de la mano izquierda.
Las intervenciones practicadas a todos los pacientes por el equipo interdisciplinario de salud especializado en mano (grupo de investigación F-CIBER-HAND) comprendieron: a) el médico cirujano ortopedista de mano realizó reducción abierta más osteosíntesis y seguimiento posquirúrgico; b) el médico fisiatra indicó terapia de movilización temprana a los 10-15 días del postoperatorio y realizó valoraciones periódicas para describir las secuelas traumáticas, la funcionalidad, la intensidad del dolor y los arcos de movilidad; c) la fisioterapeuta especialista en Ortopedia y Traumatología realizó de 7 a 10 sesiones de terapia aplicando el protocolo de rehabilitación convencional; d) Ingeniería biomédica supervisó las sesiones de terapia de movilización asistida por ortesis robóticas, y e) el médico epidemiólogo analizó los datos de las historias clínicas y asesoró el proceso de investigación clínica.
Los instrumentos utilizados fueron: historia clínica, escala DASH, escala visual análoga del dolor (EVA) y goniómetro.
ResultadosPrimer caso clínicoDescripción clínica. Paciente femenina de 20 años, estudiante de Psicología y trabajadora en centro de llamadas telefónicas, que presentó un traumatismo en el hogar el 12 de noviembre de 2016; golpeó accidentalmente un muro con la mano derecha, sufrió fractura compleja intraarticular de la cabeza del quinto metacarpiano, a los 5 días del traumatismo se le practicó reducción abierta más osteosíntesis y a los 7 días del posquirúrgico presentó limitación funcional total del quinto dedo y limitación funcional parcial del cuarto dedo, ocasionadas por el dolor y el edema (fig. 1).

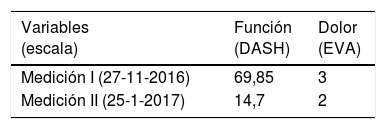
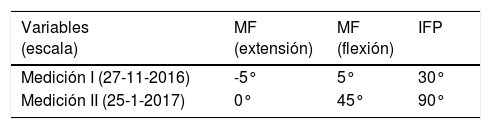
Intervención. Después de 10 días del posquirúrgico, el 27 de noviembre de 2016 inició el proceso de rehabilitación; se le practicaron 10 sesiones de fisioterapia de 60 minutos de duración cada una y 12 sesiones de terapia de movilización asistida con ortesis robótica de 60 minutos de duración cada una. Fisiatría realizó la medición de variables: Escala de Discapacidades del Hombro, el Codo y la Mano DASH, Escala Visual Análoga del Dolor (EVA) y arcos de movimiento articular (fig. 2).

Resultados. Inicialmente se encontró una puntuación en la Escala DASH de 69,85 y en la escala EVA de 3; después de 8 semanas de rehabilitación complementada por ortesis robótica, mejoró la funcionalidad a 14,7 y disminuyó el dolor a 2. Además, mejoró los arcos de movilidad articular de la articulación metacarpofalángica (MF) en extensión de -5 a 0 grados y en flexión de 5 a 45 grados; también mejoró la movilidad articular de la articulación interfalángica proximal (IFP) en flexión de 30 a 90 grados, y recuperó por completo el movimiento del cuarto dedo (tablas 1 y 2).
Descripción clínica. Paciente femenina de 52 años, ama de casa y comerciante, que presentó un traumatismo en la vía pública el 4 de diciembre de 2016 al caer por unas escaleras, sufrió un traumatismo contundente en la mano izquierda que le ocasionó una fractura conminuta de la base del cuarto metacarpiano con extensión diafisaria; a los 10 días del traumatismo se le practicó reducción abierta más osteosíntesis y a los 10 días del posquirúrgico presentó limitación funcional del tercer y cuarto dedos, ocasionada por el dolor y el edema. (fig. 3).

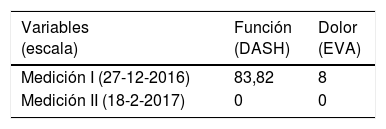
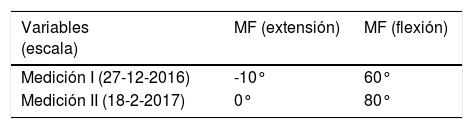
Intervención. Después de 13 días del posquirúrgico, el 27 de diciembre de 2016 inició el proceso de rehabilitación. Se le practicaron 10 sesiones de fisioterapia de 60 minutos de duración y 12 sesiones de terapia de movilización asistida con exoesqueleto. Cada sesión tuvo 60 minutos de duración. Fisiatría realizó la medición de variables: escala DASH, escala EVA y arcos de movimiento articular (fig. 4).

Resultados. Inicialmente se encontró una puntuación en la escala DASH de 83,82 y en la escala EVA de 8; después de 7 semanas de rehabilitación complementada por ortesis robótica y exoesqueleto, mejoró la funcionalidad a 0 y disminuyó el dolor a 0. Además, mejoró los arcos de movilidad articular de la articulación MF en extensión de -10° a 0° y de flexión de 60° a 80°, y recuperó por completo el movimiento del quinto dedo (tablas 3 y 4).
Descripción clínica. Paciente masculino de 20 años, estudiante de Derecho, que presentó un traumatismo en el hogar el 8 de febrero de 2017; se golpeó accidentalmente la mano derecha al caer por unas escaleras y sufrió una fractura diafisaria del quinto metacarpiano; a los 19 días del traumatismo se le practicó reducción abierta más osteosíntesis y a los 10 días del posquirúrgico presentó limitación funcional parcial del cuarto y quinto dedos, ocasionada por el dolor y el edema (fig. 5).

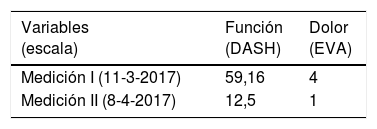
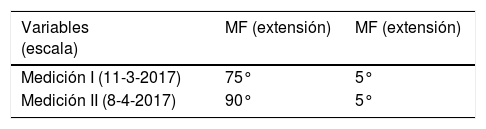
Intervención. Después de 12 días del posquirúrgico, inició el proceso de rehabilitación; se le practicaron 7 sesiones de fisioterapia de 60 minutos de duración y 5 sesiones de terapia de movilización asistida con ortesis robótica, de 60 minutos de duración. Fisiatría realizó la medición de variables: escala DASH, escala EVA y arcos de movimiento articular (fig. 6).

Resultados. Inicialmente se encontró una puntuación en la escala DASH de 59,16 y en la escala EVA de 4; después de 4 semanas de rehabilitación complementada por ortesis robótica, mejoró la funcionalidad a 12,5 y disminuyó el dolor a 1. Además, mejoraron los arcos de movilidad articular de la articulación MF de 75° a 90° y recuperó por completo el movimiento del cuarto dedo (tablas 5 y 6).
Descripción clínica. Paciente masculino de 33 años, mecánico agroindustrial, que presentó un accidente en la vía pública el 27 de enero de 2017; presentó un traumatismo contundente en la mano izquierda y una fractura compleja subcapital del segundo metacarpiano; a los 48 días del traumatismo se le practicó reducción abierta más osteosíntesis y a los 13 días del posquirúrgico presentó limitación funcional parcial del segundo dedo, ocasionada por el dolor y el edema (fig. 7).

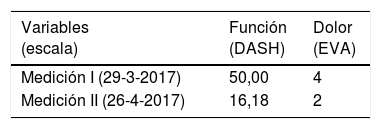
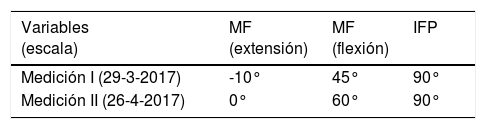
Intervención. Después de 15 días del posquirúrgico, el 31 de marzo de 2017 inició el proceso de rehabilitación; se le practicaron 10 sesiones de fisioterapia física de 60 minutos de duración y 12 sesiones de terapia de movilización asistida con ortesis robótica, de 60 minutos de duración. Fisiatría realizó la medición de variables: escala DASH, escala EVA y arcos de movimiento articular (fig. 8).

Resultados. Inicialmente se encontró una puntuación en la escala DASH de 50,00 y en la escala EVA de 4; después de 4 semanas de rehabilitación complementada por ortesis robótica, mejoró la funcionalidad a 16,18 y disminuyó el dolor a 2. Además, mejoró los arcos de movilidad articular de la articulación MF de -10 a 0 grados de extensión y de 45 a 60 grados de flexión y recuperó por completo el movimiento del cuarto dedo (tablas 7 y 8).
El estudio sugiere ventajas en el manejo de las fracturas de mano por un equipo interdisciplinario y las aplicaciones potenciales de las ortesis robóticas como complemento de la movilización pasiva temprana en el proceso de rehabilitación funcional.
El seguimiento a estos cuatro casos propone hipótesis de trabajo como las siguientes:
El manejo quirúrgico realizado por cirujano experto, asociado con la rehabilitación especializada genera la recuperación funcional en pacientes con fracturas traumáticas de la mano.
La movilización pasiva temprana asistida por ortesis robóticas es segura para el paciente y complementa eficazmente el programa de rehabilitación.
En conclusión, el manejo quirúrgico de las fracturas de mano realizado por cirujano ortopedista de mano es la base para garantizar una mejor recuperacion funcional ya que la técnica quirúrgica intenta una reconstrucción del hueso fracturado aplicando el principio de ciencia y arte, conservando la anatomía de la zona afectada y respetando al máximo los tejidos blandos y la dinámica articular. La terapia de rehabilitación temprana indicada por Fisiatría y realizada por profesional especializada en intervención fisioterapéutica en Ortopedia y Traumatología es fundamental para mejorar rápidamente el edema, el dolor y la funcionalidad de la mano y evitar en lo posible las complicaciones durante el proceso de cicatrización de los tejidos blandos y consolidación de la fractura. Las ortesis robóticas PRO-Dix son útiles para asistir al paciente en el proceso de movilización pasiva temprana durante las primeras 2-3 semanas del posquirúrgico ya que ayudan al paciente a realizar movimientos articulares suaves y lentos hasta el arco articular posible permitido por la inflamación y el dolor. Las partes del exoesqueleto EMMRA-1 utilizadas para mover las falanges proximales de los dedos con un torque menor de 10 kg/cm son útiles después de que el dolor sea menor de 3 según la escala EVA ya que obliga a los dedos a aumentar progresiva y milimétricamente su arco de movilidad durante el proceso de rehabilitación. En todos los pacientes se observó una recuperación funcional que les permitió continuar las actividades de la vida diaria y desempeñar las actividades laborales previas a la fractura.
En el futuro se deben realizar estudios prospectivos que permitan aleatorización para la generación de evidencia clínica suficiente para normalizar el uso de ortesis robóticas en rehabilitación de pacientes con lesiones de la mano.
FinanciaciónEl presente estudio fue financiado por la Fundación F-CIBER-M317, la fuente de financiación no desempeño ningún papel en el desarrollo de la investigación.
Conflicto de interesesLos autores declaran no tener conflicto de intereses en este estudio.
Gracias a la Locomotora de Investigación para el apoyo del desarrollo tecnológico de Colciencias se realizó el prototipo EMMRA-1 en el año 2015.
