







La órtesis activa es uno de los principales temas de investigación en el campo de la rehabilitación y recuperación motora de una extremidad lesionada. Dentro de las lesiones podemos resaltar la lesión en el plexo braquial el cual genera la pérdida total de la capacidad motora del miembro superior.
Materiales y métodosEsta investigación identifica el nivel de discapacidad de esta lesión y busca mejorar la capacidad motora de las personas con lesiones en el plexo braquial mediante el uso de una órtesis.
ResultadosSe obtuvo una órtesis activa construida con material ABS, impresa por una impresora 3D, con la finalidad de reducir costos y el uso de un sensor muscular EMG MyoWare activado con el musculo del hombro para controlar dos servomotores ubicados en el codo y muñeca.
DiscusiónSe logró mejorar la capacidad motora de dos pacientes que padecen esta lesión logrando realizar flexión de codo, extensión de muñeca y flexión de muñeca con la ayuda de la órtesis construida, así como también se identificaron algunas dificultades que se deben considerar para tener un producto totalmente funcional.
Nivel de Evidencia: IV
Active orthosis is one of the main research topics in rehabilitation field and recovery of an injured limb. Within the injuries we can highlight the injury of brachial plexus generates the total loss of motor capacity of the upper limb.
Materials and methodsThis research identifies the level of disability of this lesion and seeks to improve the motor capacity of people with lesions in the plexus by using an active orthosis.
ResultsWe built a printed by a 3D printer with ABS material, and using a MyoWare EMG muscle sensor activated with shoulder muscles to control two servomotors located at elbow and wrist joints.
DiscussionThis work was able to improve the motor skills of two patients suffering from this injury, achieving elbow flexion, wrist extension and wrist flexion with the help of the built-in orthosis, as well as identifying some difficulties that must be considered in order to have a fully functional product.
Evidence Level: IV.
Las personas con discapacidad conforman uno de los grupos más vulnerables y marginados del mundo. Estas personas presentan los peores resultados en las intervenciones sanitarias de los gobiernos en los países llamados “en desarrollo”; obtienen resultados académicos bajos, su participación en la economía es muy baja y registran tasas de pobreza más altas que las personas sin discapacidad. Se calcula que más de 1000 millones de personas viven con algún tipo de discapacidad, es decir, alrededor del 15% de la población mundial 1
Las lesiones del plexo braquial, son condiciones padecidas con mayor frecuencia por personas jóvenes, comprometen gravemente la función del miembro superior produciendo déficit sensitivo, motor y neurovegetativo, traducida con frecuencia en dolor, llamado neuropático, muy intenso, llegando a repercutir en el estado anímico del paciente, produciendo en ocasiones, estados depresivos 2. Las lesiones por tracción o por aplastamiento son las más frecuentes, afectando a la región supraclavicular más que a la retroclavicular o infraclavicular.
En las últimas décadas, se han desarrollado órtesis activas con el objetivo de incrementar o potenciar las actividades motoras de las personas con discapacidad de esta naturaleza. En particular, entre muchas aplicaciones, se han introducido órtesis de uso portátil con el objetivo de proporcionar asistencia de movimiento en los miembros superiores en tareas relacionadas con las actividades laborales y de la vida diaria.
Actualmente las instituciones de salud en el Perú, no cuentan con equipamiento para terapias complementarias como dispositivos mecánicos protésicos u ortésicos que permitan dar soporte o asistencia a las personas que cuentan con estos problemas, también existe una limitada terapia tradicional debido al poco personal especializado y la poca información sobre el resultado de uso de una órtesis activa. La disminución de la capacidad motora del miembro superior genera en los pacientes un aumento del dolor neuropático, atrofiación muscular, bajo desempeño laboral y por ende una baja calidad de vida.
La construcción de una órtesis activa permitirá a las personas realizar actividades motoras que perdieron por accidentes o problemas relacionados con el plexo braquial, este dispositivo será un complemento a su rehabilitación, ya que en muchos casos la rehabilitación del miembro afectado no siempre se realiza con total satisfacción, si ese no fuera el caso, el uso diario de este dispositivo generará un avance y mejora considerable conjuntamente con la rehabilitación, reduciendo las sesiones de la misma, reduciendo el dolor neuropático y aumentando la calidad de vida de las personas.
Existen diferentes investigaciones referente al desarrollo de órtesis activas como las de Hussain, S et al. 3 quienes afirman que el entrenamiento de la marcha asistida por robot puede ayudar a producir mejoras rápidas en los parámetros de la marcha funcional. Presentan resultados experimentales con una órtesis de entrenamiento de marcha robótica intrínsecamente compatible. La órtesis robótica desarrollada cuenta con 6 grados de libertad, esta órtesis cuenta un controlador de seguimiento de trayectoria basado en la ley de control de deslizamiento aumentada de la capa límite (BASMC) para guiar las extremidades del sujeto en las trayectorias de la marcha fisiológica. También controlaron las articulaciones de cadera y rodilla del plano sagital de la ortesis robótica, independientemente del control de seguimiento de la trayectoria. La ortesis robótica y el esquema de control se evaluaron en tres sujetos neurológicamente intactos que caminaban en una cinta rodante. Por otro lado Giovacchini et al. 4 presentan una órtesis activa ligera dotada de dos actuadores elásticos en serie para asistencia de flexión – extensión de cadera. Junto con la descripción de sus módulos mecatrónicos, muestran la caracterización experimental del rendimiento del sistema de actuación y control, así como la prueba de usabilidad realizada con un sujeto saludable. Los resultados de las pruebas con el sujeto saludable demostraron la usabilidad general del sistema: el sujeto podía caminar con el dispositivo sin verse obstaculizado y mientras recibía un suave perfil de torque de flexión – extensión de asistencia en ambas articulaciones de la cadera. Oh, S., Mohammed S et al. 5 proponen un mecanismo novedoso para dispositivos ortopédicos, que tiene un actuador de articulación activo con un mecanismo elástico biarticular que conecta dos articulaciones simultáneamente. La elasticidad biarticular en el mecanismo propuesto se adopta para utilizar la función de transferencia de energía de los músculos biarticulares de modo que el par del actuador de la articulación activa se transmita eficientemente, y las fuerzas requeridas para impulsar la parte superior del cuerpo de una manera más eficiente y sofisticada. Los autores proporcionan los fundamentos teóricos para analizar la cinemática y la dinámica de la elasticidad biarticular para ayudar a los ingenieros a diseñar mecanismos de asistencia y controladores que utilizan la elasticidad biarticular. La efectividad de los métodos propuestos se verificó mediante estudios de simulación. Otros trabajos como los de Shamroukh M et al. 6 diseñaron un mecanismo simple de órtesis biomecánica viscosa para la quitar del temblor del miembro superior, completándolo con actuadores y sensores. Las características sobresalientes del diseño de ortesis adaptado se incorporan en un equipo de prueba formado con los kits de LEGO Mindstorms para la simulación y la recopilación de datos. Santos, W. M. et al. 7 describen el diseño y control de una órtesis de rodilla activa impulsada por un actuador elástico giratorio serie (SEA) personalizado. El actuador propuesto incluye un motor de CC, un engranaje de tornillo sin fin y un resorte de torsión personalizado. Dado que el elemento elástico es el componente más importante en el diseño, realizan un análisis de elementos finitos del resorte para cumplir con los requisitos específicos para la asistencia a la rodilla. El control de par y la impedancia se implementan para garantizar una interacción segura con el paciente y para permitir nuevas estrategias de rehabilitación. Durante los experimentos consideraron la interacción entre el sujeto y la órtesis. Finalmente Henao, G. A. G. et al. 8 seleccionaron 4 pacientes con fractura en la mano y manifestaron tener recuperación funcional de la mano con el uso de una órtesis, disminuyeron de la intensidad del dolor según la Escala Visual Análoga del Dolor (EVA) y la recuperaron el arco de movilidad articular; además, todos los pacientes retornaron a las actividades de la vida diaria y laborales. Concluyen que con el manejo quirúrgico especializado y la rehabilitación temprana complementada con ortesis robóticas, se mejora la funcionalidad de la mano.
Materiales y métodosEl objetivo principal de este trabajo es la de mejorar la capacidad motora del miembro superior de personas con lesiones en el plexo braquial mediante un sistema de órtesis activa controlado por un sensor muscular. Para ello se ha diseñado un sistema de órtesis activa con grados de movimiento en el codo y muñeca y construido con materiales ABS mediante una impresora 3D. Las pruebas se realizaron con dos pacientes que padecen de esta lesión.
Diagnóstico de la capacidad motora del miembro superiorSe ha trabajado con dos pacientes con secuela traumática de lesión periférica del Plexo braquial izquierdo y derecho.
Ambos pacientes no cuentan con la movilidad de codo, antebrazo y muñeca, la capacidad motora del miembro superior de ambos pacientes es nula. En el caso de hombro el paciente 1 muestra una mayor rotación en la aducción y abducción de hombro, también indicaron que padecen de constantes dolores neuropático durante el día debido a la falta de movilidad del miembro superior y la ausencia de terapias de rehabilitación física.
Test de voltaje de los músculos del hombroDebido a que la órtesis activa será controlada por un sensor muscular, que será colocado en los músculos trapecio y supraespinoso del hombro, se realizó un test de voltaje a cada paciente, para ello se solicitó a cada paciente que levante el hombro en 7 ocasiones y se tomó medida del voltaje con un osciloscopio digital.
Durante el test se identificó que el movimiento de los pacientes era limitado generando un bajo voltaje, por ello se requiere que al menos el voltaje sea mayor a 2 voltios. Por este motivo se consideró que los pacientes realicen terapias de rehabilitación durante 3 meses, antes de utilizar la órtesis activa, con el fin de mejorar los músculos trapecio y supraesponiso.
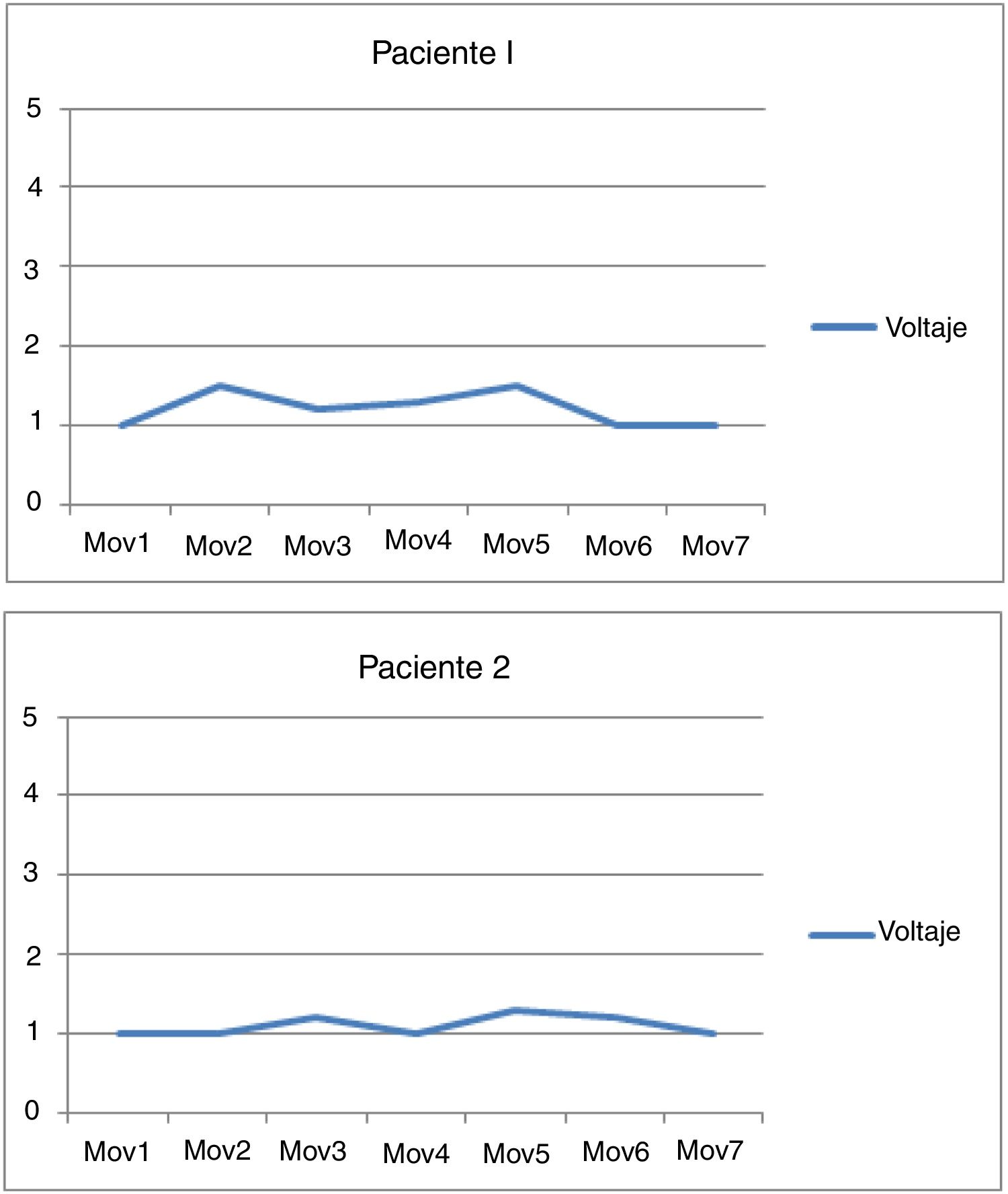
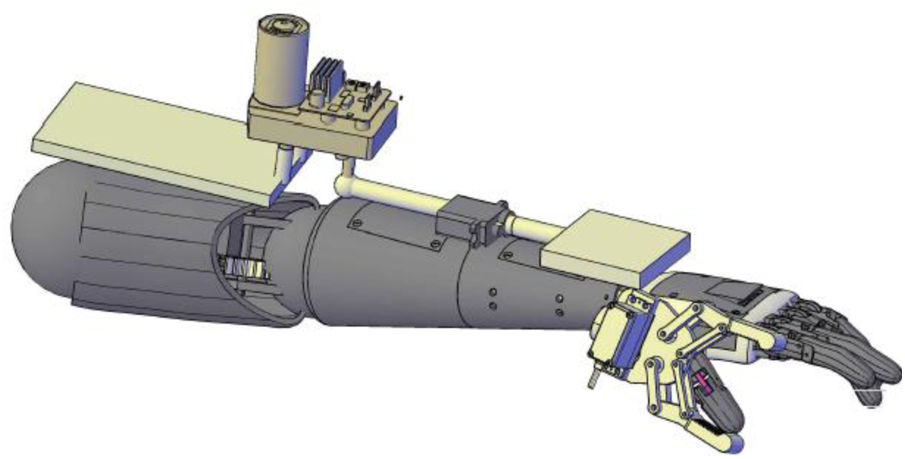
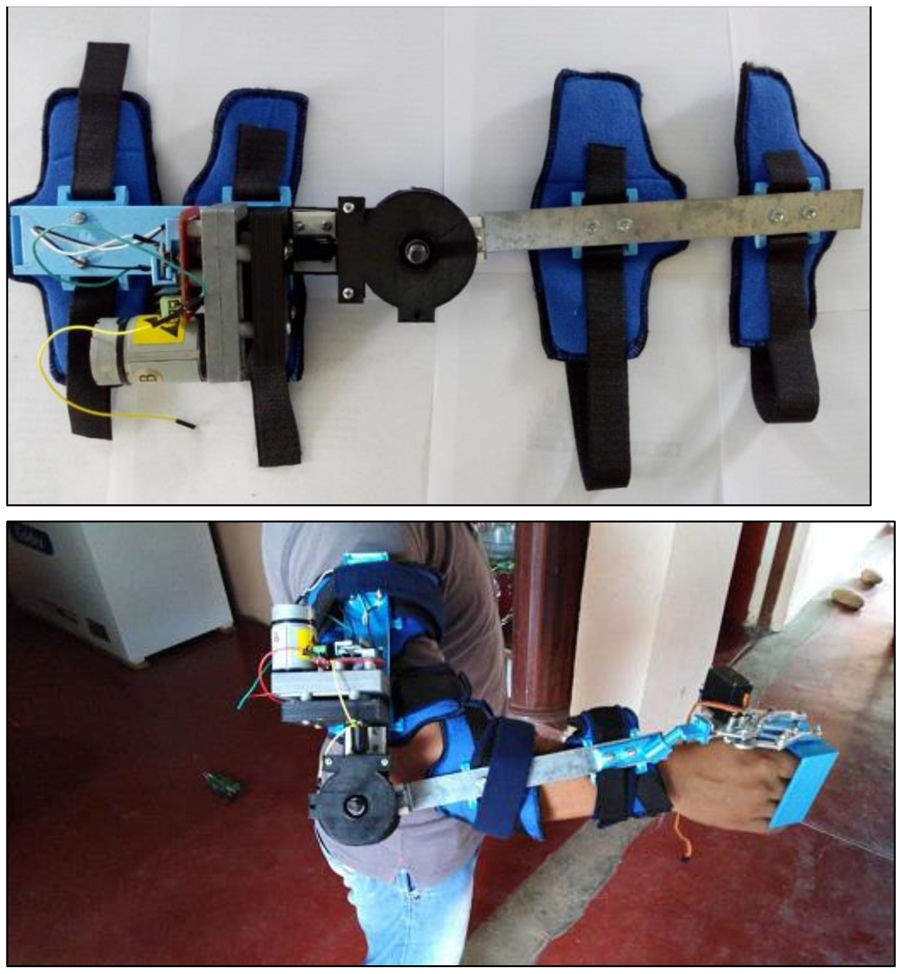
Construcción de la órtesis activaLa construcción de este prototipo de órtesis activa permitirá a los pacientes realizar actividades motoras del miembro superior, este dispositivo será un complemento a la rehabilitación. Los materiales a usados fueron dos servomotores, sensor muscular, batería 12v, Microcontrolador Arduino, filamentos ABS, 2 barra de aluminio y un gripper pinza clamp.
Las partes de la órtesis activa fueron diseñadas en el software Blender y luego impresas en material ABS para la ubicación de los servomotores y del Microcontrolador. Durante el desarrollo del prototipo de la órtesis activa se encontraron problemas al momento sostener el brazo del paciente con el dispositivo, por lo cual se optó incluir barras de aluminio y la colocación colchonetas para mejorar la comodidad.
La secuencia de uso de la órtesis activa será por una serie de movimientos que se realizará de la siguiente forma: el paciente levantará el hombro generando fuerza en los músculos trapecio y supraespinoso, al emitirse más de 2 voltios el servomotor del codo (inicialmente en 0°) realizará el movimiento hasta los 90°, posteriormente al segundo movimiento del hombro el servomotor de muñeca cerrará la pinza Gripper (inicialmente abierta), un tercer movimiento abrirá la pinza y finalmente el cuarto movimiento retornará al servomotor de codo a su posición inicial.
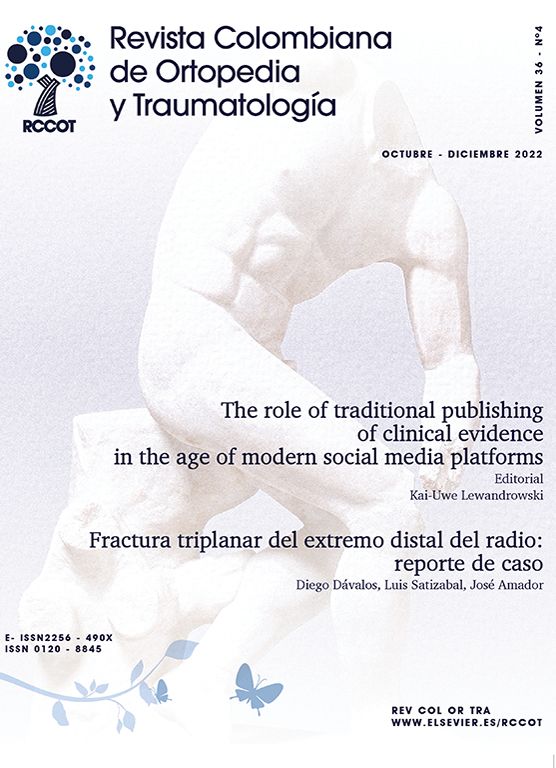
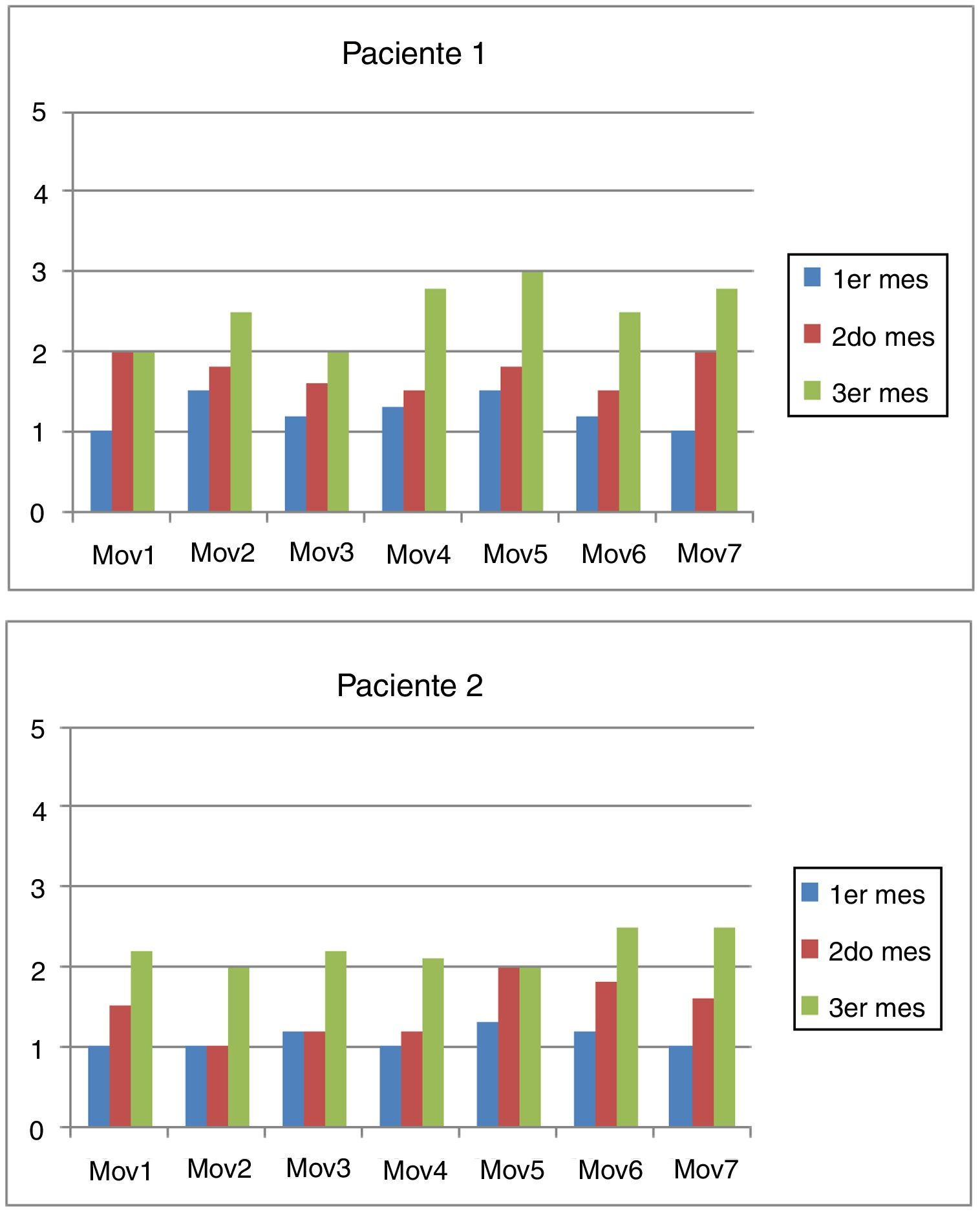
ResultadosDurante el periodo de 3 meses los pacientes recibieron terapias de rehabilitación física con el fin de mejorar los músculos del hombro y brazo. Se realizaron exámenes de electromiografía cada mes con el fin de identificar el nivel fuerza de los músculos trapecio y supraespinoso, esto con la finalidad de poder generar un mayor voltaje emitido por el sensor muscular al momento de realizar el movimiento de hombro. Los resultados podemos apreciarlos en la figura 6.
Como podemos apreciar los resultados de las terapias de rehabilitación para los músculos del hombro fueron óptimos puesto que se logró que los pacientes puedan emitir más de 2 voltios al hacer el movimiento de hombro, esto es útil para el uso del sensor muscular, ya que los pacientes podrán controlar la órtesis activa mediante los movimientos del hombro.
Las terapias realizadas durante 3 meses también sirvieron para intentar mejorar la capacidad motora de las articulaciones del miembro superior en los pacientes. Los resultados indican que solo existieron mejoras en el hombro, más no habido evolución en codo, antebrazo y muñeca. Esto confirma que el uso de una órtesis activa controlada por un sensor muscular ubicado en los músculos de hombro es necesario para mejorar la capacidad motora del miembro superior en los pacientes con lesión plexo braquial. Se realizaron las pruebas de la órtesis en los pacientes obteniendo los resultados que se pueden observar en la tabla 4.
Como podemos apreciar la órtesis activa generó movilidad en la flexión de codo y extensión y flexión de muñeca mediante el movimiento del hombro (ubicación del sensor muscular). Los procedimientos consistían en levantar el antebrazo a 90°, tomar un objeto, luego soltarlo y regresar el antebrazo a su estado inicial. La órtesis activa permitió a los pacientes obtener 4 movimientos (figuras 1-6).
Discusión





Se identificó la capacidad motora del miembro superior de los pacientes con lesión plexo braquial obteniendo indicadores que reflejan que ambos pacientes no tienen movilidad alguna en el codo, antebrazo y muñeca, solo se encontró movilidad regular en el hombro. También se realizaron terapias de rehabilitación física durante tres meses el cual confirma que los pacientes no recuperaron su capacidad motora en el codo, antebrazo y muñeca. La terapia solo pudo mejorar los músculos trapecio y supraespinoso del hombro, esta ventaja permitió que el sensor EMG Myoware pueda emitir el voltaje necesario para poder controlar la órtesis activa (tablas 1-4).
Test muscular de pacientes
| Test muscular | ||
|---|---|---|
| Músculo | Paciente 1 | Paciente 2 |
| Fuerza muscular | Fuerza muscular | |
| Trapecio | Regular + | Regular + |
| Supraespinoso | Regular + | Regular + |
| Infraespinoso | Regular + | Regular + |
| Redondo menor | Regular + | Regular + |
| Deltoides | Malo | Regular + |
| Bíceps braquial | Malo | Malo |
| Tríceps braquial | Malo | Malo |
| Flexores de la mano y muñeca | Malo | Malo |
| Extensores de la mano y muñeca | Malo | Malo |
| Músculos intrínsecos de la mano | Malo | Malo |
Desplazamiento articular del miembro superior izquierdo en grados
| Posición anatómica articulación | Movilidad | Grados. artic. | Paciente1 | |
|---|---|---|---|---|
| Activo | Pasivo | |||
| Hombro | Flexión | 180 | 10 | 160 |
| Extensión | 45 | 10 | 10 | |
| Aducción | 180 | 30 | 30 | |
| Abducción | 40 | 30 | 30 | |
| Rotac. interna | 90 | 60 | 60 | |
| Rotac. externa | 90 | 40 | 40 | |
| Codo | Flexión | 145 | 0 | 0 |
| Extensión | 180 | 0 | 0 | |
| Antebrazo | Pronación | 80 | 0 | 0 |
| Supinación | 85 | 0 | 0 | |
| Muñeca | Flexión | 80 | 0 | 0 |
| Extensión | 70 | 0 | 0 | |
| Aducción | 45 | 0 | 0 | |
| Abducción | 20 | 0 | 0 | |
Desplazamiento articular del miembro superior derecho en grados
| Posición anatómica articulación | Movilidad | Grados. artic. | Paciente2 | |
|---|---|---|---|---|
| Activo | Pasivo | |||
| Hombro | Flexión | 180 | 10 | 160 |
| Extensión | 45 | 15 | 15 | |
| Aducción | 180 | 40 | 40 | |
| Abducción | 40 | 40 | 40 | |
| Rotac. interna | 90 | 60 | 60 | |
| Rotac. externa | 90 | 40 | 40 | |
| Codo | Flexión | 145 | 0 | 0 |
| Extensión | 180 | 0 | 0 | |
| Antebrazo | Pronación | 80 | 0 | 0 |
| Supinación | 85 | 0 | 0 | |
| Muñeca | Flexión | 80 | 0 | 0 |
| Extensión | 70 | 0 | 0 | |
| Aducción | 45 | 0 | 0 | |
| Abducción | 20 | 0 | 0 | |
Se desarrolló un sistema de órtesis activa con material ABS, dos servomotores para la movilidad de codo y muñeca controlados y un sensor EMG Myoware. Durante las pruebas se evaluó el uso de la órtesis activa y se identificó que este mejoró la capacidad motora del miembro superior de los pacientes con lesiones en el plexo braquial, específicamente los pacientes lograron la movilidad de flexión de codo y extensión y flexión de muñeca con la ayuda de esta órtesis.
Durante el proceso de implementación de la órtesis activa se encontraron dificultades como el alto consumo de energía de los servomotores, el cual generó que la órtesis activa funcione solo 20min hasta volver a ser cargado, también el peso de la batería y del servomotor ASME-03B dificultaron el uso de la órtesis activa generando una carga en los paciente al soportar aproximadamente 3 kilogramos.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.
Agradecimiento especial a la Universidad Nacional de San Martín - Tarapoto por el financiamiento de este trabajo.
