



Valorar de forma experimental en cadáver el efecto de los músculos motores de la muñeca en el comportamiento cinético del carpo, bajo carga axial y en posición neutra de la muñeca.
Material y métodoSe registraron los cambios de orientación espacial de los huesos del carpo, con un registrador de trayectoria de movimiento que funciona con campos electromagnéticos. Se utilizaron 30 muñecas de cadáver fresco, cuyos principales tendones motores de la muñeca fueron aislados y sujetos a cargas proporcionales al área seccional fisiológica de cada músculo. El experimento se llevó a cabo en condiciones de carga isométrica de todos los tendones, y de forma aislada de cada tendón.
ResultadosLa carga simultánea de todos los tendones estudiados provocó una modificación de la posición tridimensional de los huesos del carpo. El flexor carpi radialis provocó supinación del escafoides y pronación del piramidal. En cambio, la carga aislada del flexor carpi ulnaris, abductor pollicis longus y extensor carpi radialis longus provocaron un movimiento de supinación de las 2 filas del carpo. Solo el extensor carpi ulnaris provocó una pronación marcada del carpo.
Comentarios y conclusionesLos músculos del antebrazo, además de los movimientos de la muñeca, provocan movimientos de pronación/supinación, flexión/extensión e inclinación radial/cubital. Proponemos que el movimiento más importante en la estabilización dinámica del carpo son los movimientos de pronación y supinación intercarpiana provocados por estos músculos. Según el mecanismo lesional o inestabilidad carpiana, puede ser beneficiosa la potenciación de un grupo muscular u otro.
To evaluate, experimentally in cadavers, the effect of the motor muscles in the wrist in the kinetic behaviour of the carpal, under axial load, and the wrist in a neutral position.
Material and methodThe changes in the spatial orientation of the carpal bones were recorded with a movement trajectory gauge that functions with electromagnetic fields. A total of 30 fresh cadaver wrists were used, in which the principal motor tendons were isolated and subjected to loads proportional to the area of the physiological section of each muscle. The experiment was performed under isometric load conditions of all the tendons, and separately from each tendon.
ResultsThe simultaneous load of all the tendons studied caused a three-dimensional change of the carpal bones. The flexor carpi radialis led to supination of the scaphoids and pronation of the pyramidal. Conversely, the isolated load of the flexor carpi ulnaris, abductor pollicis longus and the extensor carpi radialis longus, caused a supination movement of the 2 carpal rows. Only the extensor carpi ulnaris led to a marked pronation of the carpal.
Comments and conclusionsThe forearm muscles, as well as the movements of the wrist, cause pronation/supination/supination, flexion/extension and radial/cubital inclination movements. It is proposed that the most important movements in the dynamic stabilisation of the carpal are the intercarpal pronation and supination movements provoked by these muscles. Depending on the carpal injury mechanism or instability, the stimulating of one muscle group or the other may be beneficial.
Desde que se inició el estudio de la biomecánica del carpo, casi todos los esfuerzos se han centrado en la descripción de las estructuras anatómicas que están relacionadas con la estabilidad del carpo (ligamentos, cápsula articular y morfología ósea), su función y la patología que provoca la lesión de estas estructuras, en un intento de conocer cuál es la responsable de cada patrón específico de inestabilidad y cuál sería el tratamiento adecuado.
Existe otro factor muy importante que interviene en la estabilidad articular, poco valorado hasta ahora, y que hace referencia a los mecanismos de control neuromuscular sobre la estabilidad articular. A diferencia de otras articulaciones como la rodilla1 o el hombro2, de las que hay numerosos estudios centrados en la propiocepción y el efecto de la musculatura de estas articulaciones, para el carpo hay muy pocos artículos publicados hasta ahora. Los músculos motores de la muñeca provocan un efecto dinámico sobre los huesos del carpo, aumentando la estabilidad de la articulación.
Con el objetivo de determinar cuál es el efecto mecánico de los principales tendones motores de la muñeca sobre los huesos del carpo y esclarecer su papel como estabilizadores dinámicos, se diseñó un estudio experimental para valorar el comportamiento cinético del escafoides, piramidal y hueso grande bajo carga axial y en posición neutra de la muñeca.
Material y métodoPara la realización de este estudio se utilizaron 30 brazos de cadáver fresco, usando las piezas anatómicas de acuerdo con las leyes actuales y normativa vigente en nuestra Institución. La edad media de los especímenes fue de 79 años (rango 55-95 años), 18 hombres y 12 mujeres, 18 brazos izquierdos y 12 derechos, todos ellos con un semilunar tipo i (que no tiene faceta medial, a diferencia del tipo ii en el que existe una faceta articular para el hueso ganchoso3).
La preparación de la pieza anatómica consistió en la resección de la piel y tejido subcutáneo, identificación y aislamiento de los principales tendones motores de la muñeca a nivel del tercio medio del antebrazo, y manteniendo intacto el retináculo de los extensores y flexores: extensor carpi radialis longus (ECRL), abductor pollicis longus (APL), extensor carpi ulnaris (ECU), flexor carpi radialis (FCR) y flexor carpi ulnaris (FCU). Se realizó una desarticulación de los dedos a nivel de la articulación metacarpofalángica. Se identificaron los ligamentos dorsales del carpo, y se realizó una resección capsular limitada sin dañar los ligamentos extrínsecos radiopiramidal dorsal e intercarpiano dorsal, ni los ligamentos intrínsecos. En este estudio se realizó una extirpación del extensor carpi radialis, debido a la interferencia de este tendón con la colocación del tornillo de nailon utilizado para fijar el sensor del escafoides.
A continuación, la pieza anatómica se colocó en un soporte diseñado específicamente para este estudio, en posición vertical y en pronosupinación neutra a través de 2 clavos de Steinmann colocados en cúbito y radio (fig. 1). La posición de la muñeca se controló a través de una aguja de Kirschner endomedular en el tercer metacarpiano, y esta aguja se conectó a un dispositivo semicircular de la parte superior del soporte. Esta aguja de Kirschner bloquea casi completamente los movimientos de flexión/extensión e inclinaciones radial/cubital de la fila distal del carpo, pero permite la migración proximal y las rotaciones. Estos movimientos son transmitidos a la fila proximal del carpo si los ligamentos están intactos. Así, en muñecas con los ligamentos intactos y bajo carga axial, la migración proximal y las rotaciones de la fila distal del carpo se transmiten a la fila proximal, provocando un movimiento tridimensional de los huesos de la fila proximal del carpo.

Cada tendón se conectó a un sistema de poleas con un hilo de nailon. Este hilo permitió la colocación de los pesos para simular la contracción de la musculatura del antebrazo.
Para registrar los cambios de posición de los huesos del carpo se utilizó un aparato digitalizador 3D y registrador de la trayectoria de movimiento, que funciona con campos electromagnéticos, llamado Fastrak™ (Polhemus Inc., Colchester, Vermont, EE. UU.). Este aparato proporciona una medida, en tiempo real y de forma dinámica, de la posición (en coordenadas cartesianas X, Y y Z) y de la orientación (ángulos de Euler: azimut, elevación y rotación), a través de la localización de la posición y orientación de un receptor pequeño, a medida que se mueve en el espacio. Para este estudio se utilizaron 4 sensores receptores que operan a una frecuencia de actualización de 30Hz y un transmisor de corto alcance diseñado especialmente para las áreas de seguimiento que cubre un radio de 2,54cm a 60,9cm. La exactitud estática de este sistema es de 0,08cm para la posición, y de 0,15° para la orientación espacial. Los sensores se colocaron firmemente en la cara dorsal del radio, y en el cuerpo del escafoides, piramidal y hueso grande mediante tornillos de nailon. El tornillo de nailon del escafoides fue inclinado entre 20 y 30° a distal, para evitar el contacto de este con el radio en el movimiento de extensión del escafoides al realizar una carga del extensor carpi radialis longus y del ECU. Los sensores en la fila proximal se colocaron en escafoides y piramidal, puesto que tienen tendencias opuestas a flexión o extensión. El semilunar está intercalado, y es arrastrado por el escafoides a la flexión en caso de lesión luniopiramidal y a la extensión en caso de lesión escafolunar.
La carga aplicada a cada tendón se basó en investigaciones previas que sugerían para este tipo de experimentos el uso de cargas proporcionales al área seccional transversa del músculo junto con su actividad electromiográfica relativa de cada músculo cuando se coge un objeto con la muñeca en posición neutra4–6. Para simular el tono muscular en reposo, se realizó una carga de cada tendón con un peso equivalente a 1,5 Newton (N). Para simular la contracción de los músculos se utilizaron pesos equivalentes a 9,8N para el APL; 24,5N para el ECRL; 14,7N para el ECU; 13,7N para el FCR y 21,5N para el FCU. El sistema de coordenadas del transmisor y de los 4 receptores se calculó según el eje longitudinal del radio. El eje Z se definió a lo largo del eje longitudinal del radio, el eje Y se estableció a lo largo del plano frontal perpendicular al eje Z, y el eje X en al plano sagital, perpendicular a los ejes Z e Y. Así, la rotación alrededor el eje Z (azimut) se corresponde con la pronación y supinación, la rotación alrededor del eje Y (elevación) con la flexión y extensión, y la rotación alrededor del eje X (rotación) se corresponde con la inclinación radial y cubital. Se realizó la recogida de los datos de 5 determinaciones consecutivas y la media fue utilizada para determinar los cambios de posición de los sensores. Estas medias fueron analizadas estadísticamente mediante el test de Wilcoxon para datos apareados con el software SPSS v15. La diferencia fue considerada estadísticamente significativa cuando el valor p fue <0,05.
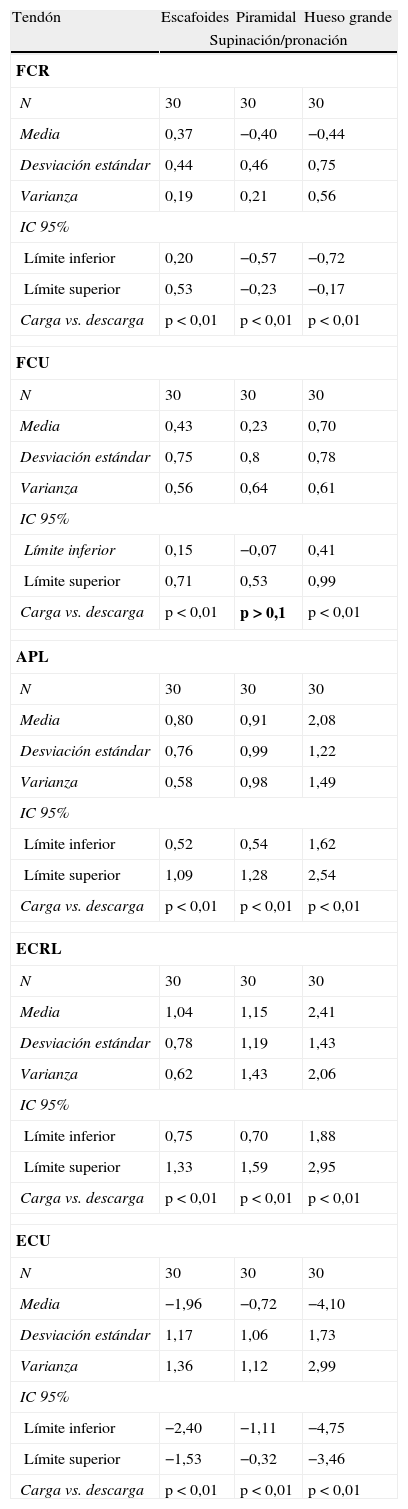
ResultadosLa carga simultánea de todos los tendones estudiados provocó una modificación de la posición tridimensional de los huesos del carpo. La carga de todos los tendones provocó una supinación del carpo además de flexión de la fila proximal. El FCR provocó supinación del escafoides y pronación del piramidal, en la gran mayoría de los casos. En la tabla 1 se detalla los datos relativos a la carga individual de cada tendón. La carga aislada del FCR, en la mayoría de los casos, provoca supinación del escafoides y pronación del piramidal y hueso grande. En cambio, la carga aislada del FCU, APL y ECRL provocó un movimiento de supinación de las 2 filas del carpo. Solo el ECU provocó una pronación marcada del carpo, tanto de la fila proximal como de la distal.
Efecto de la carga aislada de los principales tendones motores de la muñeca en el plano transverso de rotación
| Tendón | Escafoides | Piramidal | Hueso grande |
| Supinación/pronación | |||
| FCR | |||
| N | 30 | 30 | 30 |
| Media | 0,37 | −0,40 | −0,44 |
| Desviación estándar | 0,44 | 0,46 | 0,75 |
| Varianza | 0,19 | 0,21 | 0,56 |
| IC 95% | |||
| Límite inferior | 0,20 | −0,57 | −0,72 |
| Límite superior | 0,53 | −0,23 | −0,17 |
| Carga vs. descarga | p<0,01 | p<0,01 | p<0,01 |
| FCU | |||
| N | 30 | 30 | 30 |
| Media | 0,43 | 0,23 | 0,70 |
| Desviación estándar | 0,75 | 0,8 | 0,78 |
| Varianza | 0,56 | 0,64 | 0,61 |
| IC 95% | |||
| Límite inferior | 0,15 | −0,07 | 0,41 |
| Límite superior | 0,71 | 0,53 | 0,99 |
| Carga vs. descarga | p<0,01 | p>0,1 | p<0,01 |
| APL | |||
| N | 30 | 30 | 30 |
| Media | 0,80 | 0,91 | 2,08 |
| Desviación estándar | 0,76 | 0,99 | 1,22 |
| Varianza | 0,58 | 0,98 | 1,49 |
| IC 95% | |||
| Límite inferior | 0,52 | 0,54 | 1,62 |
| Límite superior | 1,09 | 1,28 | 2,54 |
| Carga vs. descarga | p<0,01 | p<0,01 | p<0,01 |
| ECRL | |||
| N | 30 | 30 | 30 |
| Media | 1,04 | 1,15 | 2,41 |
| Desviación estándar | 0,78 | 1,19 | 1,43 |
| Varianza | 0,62 | 1,43 | 2,06 |
| IC 95% | |||
| Límite inferior | 0,75 | 0,70 | 1,88 |
| Límite superior | 1,33 | 1,59 | 2,95 |
| Carga vs. descarga | p<0,01 | p<0,01 | p<0,01 |
| ECU | |||
| N | 30 | 30 | 30 |
| Media | −1,96 | −0,72 | −4,10 |
| Desviación estándar | 1,17 | 1,06 | 1,73 |
| Varianza | 1,36 | 1,12 | 2,99 |
| IC 95% | |||
| Límite inferior | −2,40 | −1,11 | −4,75 |
| Límite superior | −1,53 | −0,32 | −3,46 |
| Carga vs. descarga | p<0,01 | p<0,01 | p<0,01 |
APL: abductor pollicis longus; ECRL: extensor carpi radialis longus; ECU: extensor carpi ulnaris; FCR: flexor carpi radialis; FCU: flexor carpi ulnaris; IC: intervalo de confianza.
Todos los datos están expresados en grados.
Supinación/pronación: valores positivos indican supinación y negativos pronación.
Carga vs. descarga. T Student. Estadísticamente significativo p<0,05.
Datos en negrita, no estadísticamente significativo.
A pesar de la importancia de los reflejos neuromusculares y la acción de los músculos del antebrazo en la estabilidad carpiana7–10, se han publicado muy pocos artículos hasta la fecha en este campo. En 1980, Kauer demuestra que el extensor pollicis brevis, el APL y el ECU están en una posición isométrica durante los movimientos de flexión/extensión de la muñeca, y junto a la objetivación de que estos tendones prácticamente no se mueven durante estos movimientos, los describe como un sistema colateral ajustable. Sin embargo, no realizó ninguna mención del papel de estos músculos como estabilizadores del carpo11. En 1992, Ruby sugirió que todos los tendones que cruzan la muñeca podrían tener un efecto dinámico en la estabilidad del carpo, pero tampoco definió el papel de cada músculo en la estabilización dinámica del carpo12. El FCR es el único músculo al que se le ha atribuido un papel específico como estabilizador del escafoides. En 1994, Jantea et al. sugirieron que el FCR tenía un rol como estabilizador dinámico del escafoides durante el movimiento del carpo. Se basaron en el hecho de que el tendón de este músculo utiliza el polo distal del escafoides como polea de reflexión, y por tanto su contracción provocaría una extensión del escafoides, evitando el colapso en flexión del escafoides bajo carga13. Sin embargo, Salva Coll et al. demostraron que en diferentes grados de flexión y extensión de la muñeca, el FCR siempre provoca un movimiento de flexión del escafoides14. Ello es debido a la posición oblicua del escafoides respecto al eje longitudinal del antebrazo. Al realizar una carga del tendón del FCR, la fuerza se transmite a través de la articulación escafotrapeciotrapezoidea, y ello provoca la flexión del escafoides.
Basados en los hallazgos de nuestro estudio, parece razonable dividir los músculos motores de la muñeca en 2 grupos: los músculos que provocan un movimiento de pronación en la fila distal del carpo, representados por el ECU y el FCR, y los que provocan un movimiento de supinación, el ECRL, el APL y el FCU.
Evidentemente, si los ligamentos carpianos están intactos, estos movimientos en la fila distal del carpo son transmitidos a la fila proximal. Así, una correcta interacción y balance muscular son de crucial importancia en la estabilización dinámica del carpo. En carga axial, el escafoides tiende a flexionar y pronar. Existen diversas teorías para explicar los mecanismos de compensación de esta tendencia natural. Kauer sugiere que esta tendencia es contrarrestada por la tendencia del semilunar a extenderse, debido a su configuración en cuña palmar11. En cambio Weber, sugiere que esta tendencia es contrarrestada por la morfología de la articulación piramido-ganchoso, que evitaría que el piramidal se flexionara15. De hecho, cuando se realiza una carga de todos los tendones, el movimiento resultante es de flexión de la fila proximal, pero en supinación. Por tanto, esta supinación contrarrestaría la tendencia a la pronación del escafoides. De hecho, la supinación de la fila proximal y del escafoides podría tener un efecto protector del ligamento escafolunar al disminuir el espacio escafolunar y disminuir las cargas a las que está sometido. En cambio, el ECU, único músculo que provoca pronación del escafoides, sería un desestabilizador de la articulación escafolunar, e incluso podría empeorar una inestabilidad escafolunar preexistente.
En resumen, en este estudio describimos los efectos de la carga isométrica de 5 músculos del antebrazo, en la alineación tridimensional del escafoides, piramidal y hueso grande. En el plano transverso de rotación, los músculos motores de la muñeca se pueden dividir en pronadores y supinadores, dependiendo del efecto que tienen sobre la fila proximal y distal del carpo. El movimiento de supinación, que se transmite a la fila proximal y al escafoides, contrarrestaría la tendencia natural del escafoides a rotar en pronación, siendo por tanto «protectores» del ligamento escafolunar, mientras que el ECU, un potente pronador, podría empeorar cualquier inestabilidad escafolunar preexistente. Estos hallazgos servirán de base para desarrollar estudios en los que se pueda determinar un protocolo específico de potenciación muscular según el tipo de lesión o de reconstrucción ligamentosa del carpo.
Nivel de evidenciaNivel de evidencia iii.
Responsabilidades éticasProtección de personas y animalesLos autores declaran que para esta investigación no se han realizado experimentos en seres humanos ni en animales.
Confidencialidad de los datosLos autores declaran que en este artículo no aparecen datos de pacientes.
Derecho a la privacidad y consentimiento informadoLos autores declaran que en este artículo no aparecen datos de pacientes.
FinanciaciónBeca de la Fundación SECOT para proyectos de investigación 2008.
Beca de la Societat Catalana de Cirurgia Ortopèdica i Traumatología para la realización de tesis doctorales 2008.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.
