


Si los procesos de estabilización neuromuscular son adecuados, la lesión de los ligamentos escafolunares no siempre evoluciona hacia la desestabilización del carpo. Los mecanismos por los cuales los músculos logran compensar ese defecto son poco conocidos. Hemos diseñado un trabajo experimental encaminado a aclarar esos mecanismos.
Material y métodoEn 10 muñecas de cadáver, sin lesiones preexistentes, se han estudiado los cambios posicionales del escafoides, piramidal y hueso grande, producidos por la carga isométrica, aislada o conjunta, de los músculos motores de la muñeca, antes y después de seccionar los ligamentos escafolunares. Para ello, se han colocado sensores en la superficie de tales huesos, y se ha utilizado el sistema Fastrack® de rastreo de sensores.
ResultadosLa carga simultánea de los músculos motores de la muñeca induce a cambios rotacionales en flexión y supinación de los huesos de la hilera proximal. Tras la sección de los ligamentos escafolunares, el escafoides reacciona rotando en pronación y flexión, mientras que el piramidal prona y se extiende. En tales circunstancias, los músculos que empeoran la desaxación carpiana son el extensor carpi ulnaris y el flexor carpi ulnaris. En cambio, con la carga aislada de los músculos del lado radial, se reduce la diástasis escafolunar y mejora la alineación carpiana.
ConclusiónEn la inestabilidad escafolunar dinámica hay que evitar la contracción isométrica de los músculos cubitales del carpo, pues con ello se promueve una mayor diástasis escafolunar. Los demás músculos tienen un efecto contrario, estabilizando el carpo cuando han fracasado los estabilizadores primarios.
As long as the neuromuscular stabilizers are intact, a lesion of the scapholunate ligament may or may not progress to a carpal instability. The mechanisms by which the muscles compensate this defect are not very well known. We designed an experimental study with the aim of clarifying these mechanisms.
Material and methodUsing 10 fresh wrists, with no pre-existing lesions, we studied the movements of the scaphoid, triquetrum and capitate produced by the isometrical loading of the muscles which move the wrist, each of them isolated or combined, before and after cutting off the scapholunate ligaments. To do this, we placed sensors in each of these bones and used the Fastrack system to record these movements.
ResultsThe simultaneous loading of the muscles of the wrist produce rotational movements in flexion and supination of the proximal carpal row. After cutting off the scapholunate ligaments, the scaphoid rotates in pronation and flexion, while the triquetrum rotates in pronation and extension. In this situation of a scapholunate lesion, the muscles that worsen the carpal dexasation are the extensor carpi ulnaris and flexor carpi ulnaris. On the other hand, the isolated loading of the radial muscles reduce the scapholunate diastasis, thus improving the carpal alignment.
ConclusionIn dynamic scapholunate instabilities, isometric contraction of the ulnar carpal muscles must be avoided, as it promotes the scapholunate diastasis. The rest of the muscles have the opposite effect, stabilizing the carpus when primary stabilizers have failed.
Uno de los aspectos más controvertidos de la biomecánica carpiana son los denominados mecanismos de estabilización del carpo. Cuando se altera alguno de los elementos que colaboran en la estabilidad de la muñeca, pueden aparecer cambios en la manera que se mueven los elementos óseos que la componen (alteración cinemática) y/o en la forma en que estos se adaptan a las cargas que la atraviesan (alteración cinética). Cuando esto ocurre, la muñeca suele evolucionar hacia la artrosis generalizada, frecuentemente asociada a manifestaciones clínicas en forma de dolor, debilidad funcional, resaltes articulares y crujidos1,2. Paradójicamente, existen casos donde la lesión ligamentosa no cursa con dolor ni causa una gran incapacidad funcional al paciente3–5. Si bien es probable que esta falta de correlación entre patología y sintomatología sea debida a la presencia de mecanismos compensadores de índole neuromuscular, no existe todavía una prueba irrefutable de que esto sea así. El presente estudio pretende avanzar en el conocimiento de estos mecanismos de estabilización secundaria del carpo.
La lesión del complejo ligamentoso escafolunar es la causa más frecuente de inestabilidad carpiana, pudiendo provocar un grado considerable de disfunción e incluso interferir seriamente en las actividades de la vida diaria6. A fin de evitar o detener el proceso degenerativo, se han propuesto diversas estrategias, la mayoría encaminadas a restablecer la continuidad ligamentosa, y con ello normalizar la cinemática carpiana. Durante años, no se comprendía por qué algunos pacientes evolucionaban bien, incluso sin tratamiento, mientras que otros respondían mal a pesar de haber tenido la mejor reconstrucción ligamentosa posible. Hoy sabemos que con la reconstrucción de los ligamentos (estabilización primaria) no es suficiente, y que a menos que no se normalicen los mecanismos secundarios de estabilización muscular, esas reconstrucciones están abocadas, tarde o temprano, al fracaso7.
Desde que se demostró la presencia de estructuras neurales y corpúsculos sensoriales en los ligamentos de la muñeca, se ha especulado sobre cuál sería el papel de la propiocepción en la estabilidad carpiana8,9. La presencia de mecanorreceptores en su interior demuestra que los ligamentos son estructuras funcionalmente más complejas de lo que se creía8. Los ligamentos, aparte de ejercer una función estática de control primario de la cohesión articular, están capacitados para proporcionar información al sistema nervioso central a fin de que este ordene las respuestas musculares que sean precisas en cada momento para un adecuada estabilidad dinámica de la articulación10–12.
La estabilidad carpiana, por lo tanto, depende de una adecuada interacción entre la forma y la orientación de las superficies articulares, la tensión de los ligamentos y la acción de los músculos que controlan la postura articular11,13. Se conocen bien las estructuras anatómicas que, de un modo estático, participan en que exista una correcta transmisión de cargas a través de la muñeca. Se ignoran, en cambio, muchos de los mecanismos dinámicos neuromusculares que modulan dicha transmisión. En los últimos años se ha trabajado bastante para conocer cómo pueden los músculos lograr que el carpo no se colapse cuando existen defectos ligamentosos importantes. En este sentido, se han publicado artículos sobre el efecto de la contracción aislada o conjunta de determinados músculos sobre la posición y orientación de los huesos del carpo14–17. Hasta ahora todos los estudios se han realizado sobre muñecas normales, sin lesiones ligamentosas. En el presente estudio hemos analizado qué diferencias existen entre los efectos cinéticos producidos por la contracción muscular, aislada o conjunta, en muñecas normales, y los producidos en las mismas muñecas tras sección de los ligamentos escafolunares.
Material y métodoPara la realización de este estudio se asignaron 15 antebrazos de cadáver fresco criopreservado. Una vez descongeladas las piezas a temperatura ambiente, resecamos completamente la piel y la fascia superficial. Los dedos, incluido el pulgar, se amputaron a nivel de la articulación metacarpofalángica y se extrajeron los tendones flexores y extensores, preservando ambos retináculos. Sin desinsertarlos distalmente, los tendones de los principales músculos motores de la muñeca: [abductor pollicis longus (APL), extensor carpi radialis longus (ECRL), extensor carpi ulnaris (ECU), flexor carpi ulnaris (FCU) y flexor carpi radialis (FCR)] fueron seccionados a nivel del tercio medio del antebrazo. El tendón del extensor carpi radialis brevis fue extirpado completamente porque interfería en la colocación del sensor del escafoides.
A fin de comprobar la integridad de los ligamentos intrínsecos y extrínsecos de la muñeca, y de permitir la inserción posterior de los sensores en la cara dorsal del escafoides y del piramidal, se resecó un triángulo capsular entre el ligamento radiocarpiano dorsal y el intercarpiano dorsal evitando lesionar dichas estructuras. De los 15 especímenes asignados a este estudio, 5 tuvieron que descartarse por presentar algún tipo de lesión intracarpiana que podía haber alterado los resultados. La edad media de los 10 especímenes incluidos en esta serie fue de 77,3 años (rango: 65-91). Había 7 antebrazos de varón y 3 de mujer, todos ellos desparejados; 5 eran izquierdos y 5 derechos. Tras ser cuidadosamente disecados al finalizar estos experimentos, los 10 especímenes fueron considerados como normales.
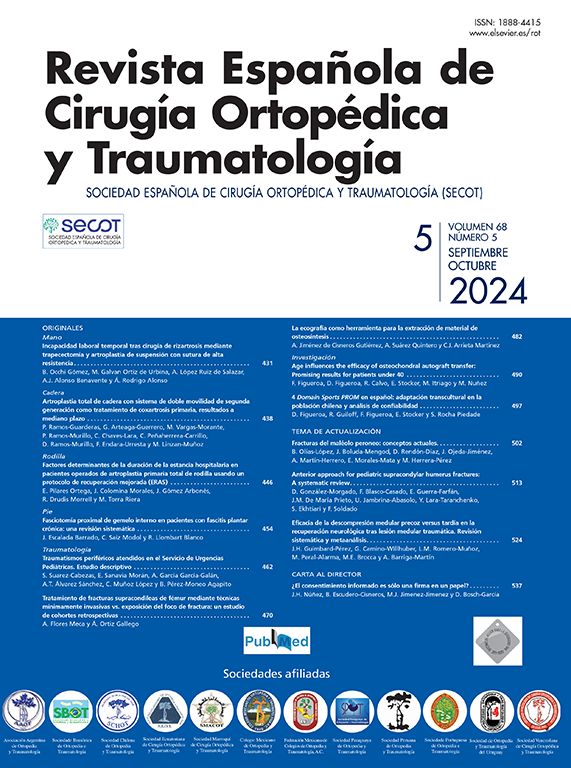
Los especímenes fueron colocados verticalmente en un soporte especialmente diseñado para estos estudios, y fijados al mismo mediante 2 clavos Steinman a través de las diáfisis del radio y el cúbito en rotación neutra. Para sostener la mano alineada con la diáfisis del radio en los planos sagital y coronal se introdujo una aguja en el canal medular del 3er metacarpiano y se sujetó distalmente a la guía semicircular del soporte en posición neutra de la muñeca. Dicha sujeción impedía todo movimiento sagital o coronal del carpo, si bien le permitía total libertad para migrar proximalmente y rotar en el plano axial (pronación-supinación) sin restricciones. Con ello se pretendía reproducir las condiciones existentes al cerrar el puño con fuerza tras bloquear la muñeca en posición neutra (fig. 1).
. Para determinar los cambios en el alineamiento espacial de los huesos del carpo estudiados se utiliza el sistema Fastrak® insertando unos sensores en los huesos a estudiar.")
Esquema del soporte utilizado en estos experimentos. La contracción muscular se simula mediante la aplicación de pesos a los tendones motores de la muñeca seccionados a nivel del tercio medio del antebrazo (flechas). Para determinar los cambios en el alineamiento espacial de los huesos del carpo estudiados se utiliza el sistema Fastrak® insertando unos sensores en los huesos a estudiar.
Mediante cuerdas de nylon muy resistente, el extremo proximal de los tendones fue conectado a un sistema de poleas que permitía cargar los tendones con una cantidad variable de pesos. Para imitar el tono muscular, a todos los tendones se aplicó una carga constante de 1,5 newtons (N). Para simular la contracción muscular, los tendones fueron sometidos a cargas proporcionales a su área seccional fisiológica y a la actividad electromiográfica relativa exhibida por cada músculo cuando se sujeta un objeto con la muñeca en posición neutra14. Según estos criterios, los pesos que se colgaron al extremo de los diferentes tendones fueron los equivalentes a las siguientes fuerzas: APL: 9,8N; ECRL: 24,5N; ECU: 14,7N; FCR: 13,7N y FCU: 21,5N.
Para monitorizar los desplazamientos y las rotaciones espaciales del escafoides y el piramidal, se utilizó el sistema Fastrack® (Polhemus Inc., Colchester, Vermont, EE. UU.). Este sistema crea un campo electromagnético en el que se puede calcular la posición y orientación de unos marcadores específicos de movimiento (sensores) en relación a un sistema fijo coordinado (transmisor). Los sensores trabajan con una frecuencia de actualización de 30Hz, dentro de un radio de acción operativo de 2,54cm a 60,9cm alrededor del transmisor. La precisión estática del sistema es de 0,8mm de traslación y 0,15° de rotación. Los sensores fueron fijados a la cara dorsal del escafoides, piramidal y hueso grande, mediante tornillos de nylon para que no interfirieran en el campo electromagnético. El emisor del campo magnético se fijó en el aparato de sujeción del especímen. Se decidió no aplicar un sensor en el semilunar porque, en posición neutra, apenas quedaba superficie ósea donde insertar un sensor que no se apoye en el borde dorsal del radio.
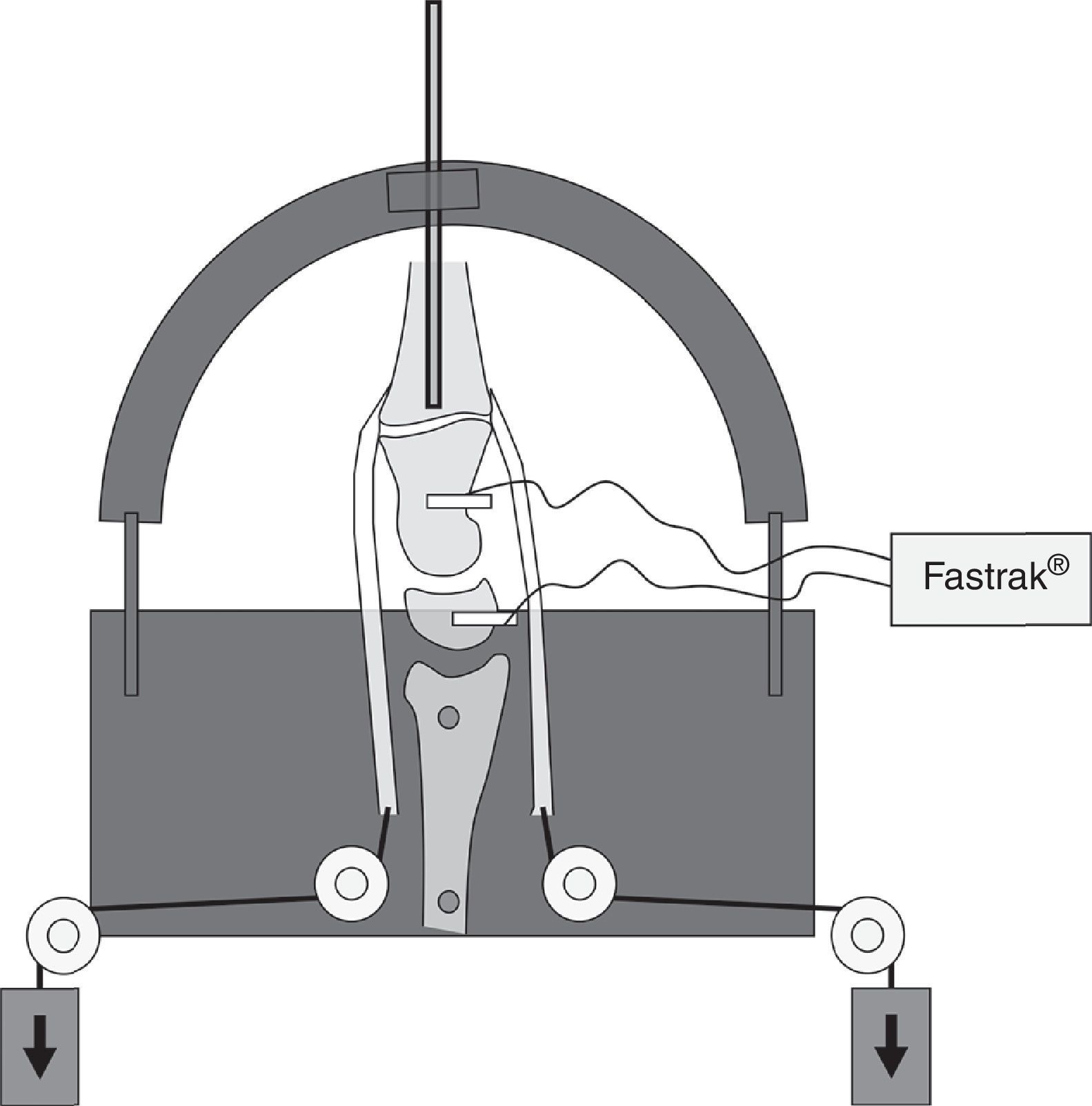
Para determinar la posición espacial de cada sensor, se definió un sistema de coordenadas tomando al radio como referencia. El eje Z correspondía al eje longitudinal del radio, el eje Y se alineó en el plano coronal, perpendicular al eje Z, y el eje X se colocó a lo largo del plano sagital, perpendicular al plano formado por los ejes Y y Z (fig. 2).

La posición espacial de cada sensor fue determinada en 14 situaciones distintas: con la muñeca intacta sin carga, con la muñeca intacta bajo carga simultánea de todos los tendones a la vez, con la muñeca intacta bajo carga aislada de cada uno de los 5 tendones, y volviendo a repetir todas las mediciones tras haber seccionado los ligamentos escafolunares. Cada determinación se realizó 5 veces consecutivas, y se utilizó la media de las 5 determinaciones para los cálculos ulteriores.
Los cambios de posición de los huesos carpianos secundarios a la aplicación de las distintas cargas se evaluaron comparando su posición sin carga con la posición adoptada tras aplicar la carga. Para facilitar su comprensión, los desplazamientos fueron descompuestos en sus 3 componentes rotacionales (ángulos Euler): la rotación alrededor del eje Z (ángulo «azimut») indica pronación-supinación, la rotación en torno al eje Y (ángulo «elevación») indica flexión-extensión, y la rotación sobre el eje X (ángulo «rotación»), indica desviación radial-cubital.
Tras conocer el análisis cinético del carpo normal, se procedió a provocar una inestabilidad escafolunar. Para ello, no solamente se seccionaron los 3 componentes del complejo ligamentoso escafolunar (porción dorsal, proximal y palmar), sino que también se cortó el ligamento radiosemilunar largo y el ligamento intercarpiano dorsal. Se consideró que se había obtenido suficiente inestabilidad escafolunar cuando la articulación permitía una diástasis superior a los 6mm. Una vez asegurado que existía el nivel adecuado de inestabilidad, se procedió a repetir todas las determinaciones y compararlas con las obtenidas cuando el carpo era normal.
Cada uno de los 3 componentes del movimiento (azimut, elevación y rotación) determinado para cada sensor al aplicarles cada uno de los 6 tipos de carga con la muñeca intacta, fue comparado estadísticamente con esa misma determinación realizada tras sección de los ligamentos escafolunares, mediante el test no paramétrico de los rangos de Wilcoxon. Cuando el valor de p era menor de 0,05 la diferencia se consideró estadísticamente significativa.
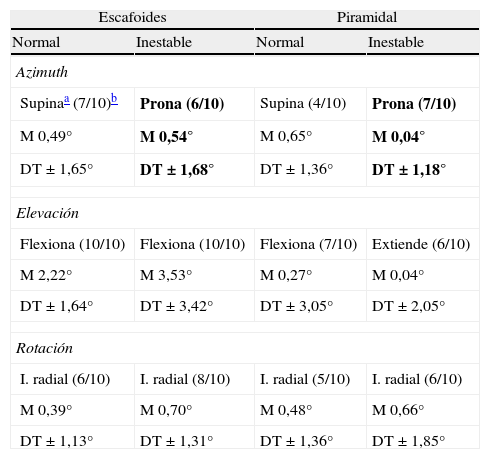
ResultadosEn la tabla 1 se recogen los desplazamientos registrados por el escafoides y el piramidal al aplicar cargas simultáneas a todos los tendones antes y después de seccionar los ligamentos escafolunares. Con la muñeca intacta, la carga muscular induce una rotación en supinación, flexión e inclinación radial en los huesos de la primera fila del carpo. Tras seccionar los ligamentos escafolunares, se produce un cambio significativo en el comportamiento cinético tanto del escafoides como del piramidal: bajo carga de todos los tendones conjuntamente, los 2 huesos estudiados no supinan, sino que sufren una rotación en pronación, siendo este cambio estadísticamente significativo (escafoides p=0,049, piramidal=0,037). Destaca también, el cambio de comportamiento de ambos huesos en el plano sagital: tras la sección de los ligamentos escafolunares, la carga muscular conjunta provoca un incremento de la flexión del escafoides, mientras que el piramidal se extiende ligeramente.
Movilidad que presentan los huesos de la fila proximal del carpo con la carga de todos los tendones, antes y después de crear una inestabilidad escafolunar
| Escafoides | Piramidal | ||
| Normal | Inestable | Normal | Inestable |
| Azimuth | |||
| Supinaa (7/10)b | Prona (6/10) | Supina (4/10) | Prona (7/10) |
| M 0,49° | M 0,54° | M 0,65° | M 0,04° |
| DT±1,65° | DT±1,68° | DT±1,36° | DT±1,18° |
| Elevación | |||
| Flexiona (10/10) | Flexiona (10/10) | Flexiona (7/10) | Extiende (6/10) |
| M 2,22° | M 3,53° | M 0,27° | M 0,04° |
| DT±1,64° | DT±3,42° | DT±3,05° | DT±2,05° |
| Rotación | |||
| I. radial (6/10) | I. radial (8/10) | I. radial (5/10) | I. radial (6/10) |
| M 0,39° | M 0,70° | M 0,48° | M 0,66° |
| DT±1,13° | DT±1,31° | DT±1,36° | DT±1,85° |
Los cambios estadísticamente significativos se muestran en negrita.
M: media; DT: desviación típica.
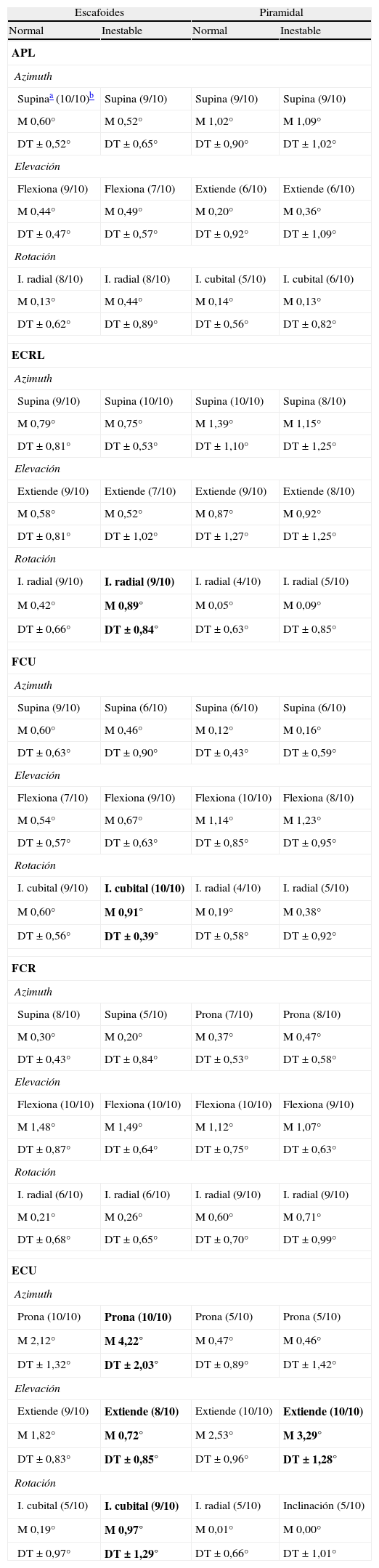
En la tabla 2 se muestra la respuesta del escafoides y piramidal al cargar individualmente cada uno de los tendones estudiados, antes y después de crear una inestabilidad escafolunar. Como podemos observar, el músculo que más alteraciones produce sobre la movilidad del escafoides es el ECU: su acción aumenta la pronación (p=0,002), disminuye la extensión (p=0,020) e incrementa la inclinación cubital (p=0,037) de manera significativa, produciendo la típica inestabilidad rotatoria del escafoides. Sobre el piramidal, este músculo provoca una mayor extensión, que junto con la tendencia hacia la flexión que muestra el escafoides, favorecerá una mayor disociación y un progresivo deterioro articular.
Movilidad que presentan los huesos de la primera fila del carpo, con la carga muscular individual, antes y después de crear una inestabilidad escafolunar
| Escafoides | Piramidal | ||
| Normal | Inestable | Normal | Inestable |
| APL | |||
| Azimuth | |||
| Supinaa (10/10)b | Supina (9/10) | Supina (9/10) | Supina (9/10) |
| M 0,60° | M 0,52° | M 1,02° | M 1,09° |
| DT±0,52° | DT±0,65° | DT±0,90° | DT±1,02° |
| Elevación | |||
| Flexiona (9/10) | Flexiona (7/10) | Extiende (6/10) | Extiende (6/10) |
| M 0,44° | M 0,49° | M 0,20° | M 0,36° |
| DT±0,47° | DT±0,57° | DT±0,92° | DT±1,09° |
| Rotación | |||
| I. radial (8/10) | I. radial (8/10) | I. cubital (5/10) | I. cubital (6/10) |
| M 0,13° | M 0,44° | M 0,14° | M 0,13° |
| DT±0,62° | DT±0,89° | DT±0,56° | DT±0,82° |
| ECRL | |||
| Azimuth | |||
| Supina (9/10) | Supina (10/10) | Supina (10/10) | Supina (8/10) |
| M 0,79° | M 0,75° | M 1,39° | M 1,15° |
| DT±0,81° | DT±0,53° | DT±1,10° | DT±1,25° |
| Elevación | |||
| Extiende (9/10) | Extiende (7/10) | Extiende (9/10) | Extiende (8/10) |
| M 0,58° | M 0,52° | M 0,87° | M 0,92° |
| DT±0,81° | DT±1,02° | DT±1,27° | DT±1,25° |
| Rotación | |||
| I. radial (9/10) | I. radial (9/10) | I. radial (4/10) | I. radial (5/10) |
| M 0,42° | M 0,89° | M 0,05° | M 0,09° |
| DT±0,66° | DT±0,84° | DT±0,63° | DT±0,85° |
| FCU | |||
| Azimuth | |||
| Supina (9/10) | Supina (6/10) | Supina (6/10) | Supina (6/10) |
| M 0,60° | M 0,46° | M 0,12° | M 0,16° |
| DT±0,63° | DT±0,90° | DT±0,43° | DT±0,59° |
| Elevación | |||
| Flexiona (7/10) | Flexiona (9/10) | Flexiona (10/10) | Flexiona (8/10) |
| M 0,54° | M 0,67° | M 1,14° | M 1,23° |
| DT±0,57° | DT±0,63° | DT±0,85° | DT±0,95° |
| Rotación | |||
| I. cubital (9/10) | I. cubital (10/10) | I. radial (4/10) | I. radial (5/10) |
| M 0,60° | M 0,91° | M 0,19° | M 0,38° |
| DT±0,56° | DT±0,39° | DT±0,58° | DT±0,92° |
| FCR | |||
| Azimuth | |||
| Supina (8/10) | Supina (5/10) | Prona (7/10) | Prona (8/10) |
| M 0,30° | M 0,20° | M 0,37° | M 0,47° |
| DT±0,43° | DT±0,84° | DT±0,53° | DT±0,58° |
| Elevación | |||
| Flexiona (10/10) | Flexiona (10/10) | Flexiona (10/10) | Flexiona (9/10) |
| M 1,48° | M 1,49° | M 1,12° | M 1,07° |
| DT±0,87° | DT±0,64° | DT±0,75° | DT±0,63° |
| Rotación | |||
| I. radial (6/10) | I. radial (6/10) | I. radial (9/10) | I. radial (9/10) |
| M 0,21° | M 0,26° | M 0,60° | M 0,71° |
| DT±0,68° | DT±0,65° | DT±0,70° | DT±0,99° |
| ECU | |||
| Azimuth | |||
| Prona (10/10) | Prona (10/10) | Prona (5/10) | Prona (5/10) |
| M 2,12° | M 4,22° | M 0,47° | M 0,46° |
| DT±1,32° | DT±2,03° | DT±0,89° | DT±1,42° |
| Elevación | |||
| Extiende (9/10) | Extiende (8/10) | Extiende (10/10) | Extiende (10/10) |
| M 1,82° | M 0,72° | M 2,53° | M 3,29° |
| DT±0,83° | DT±0,85° | DT±0,96° | DT±1,28° |
| Rotación | |||
| I. cubital (5/10) | I. cubital (9/10) | I. radial (5/10) | Inclinación (5/10) |
| M 0,19° | M 0,97° | M 0,01° | M 0,00° |
| DT±0,97° | DT±1,29° | DT±0,66° | DT±1,01° |
Los cambios estadísticamente significativos se muestran en negrita.
DT: desviación típica; M: media.
La contracción aislada del FCU también puede perjudicar la estabilidad escafolunar; en este caso, por la tendencia a forzar la inclinación cubital máxima del escafoides, con lo cual se produce un incremento de la diástasis escafolunar. Por el contrario, la carga aislada de los 3 tendones del lado radial de la muñeca induce la supinación del escafoides, en mayor o menor grado; y ello sería beneficioso pues se cerraría la diástasis típica de la inestabilidad escafolunar.
DiscusiónEl concepto de que los músculos participan en la estabilización de las articulaciones no es nuevo. Si revisamos la literatura, encontramos algunos artículos que hacen referencia a esta idea. Ya en 1980, Kauer18,19 hipotetizó que el extensor pollicis brevis, el APL y el ECU tenían un papel específico en la estabilidad del carpo, actuando cual sistema colateral dinámico que proporciona estabilidad en los movimientos de flexión-extensión e inclinación radiocubital. En 1992, Ruby20 sugirió que todos los tendones que cruzan la muñeca tienen un efecto dinámico en la estabilidad articular.
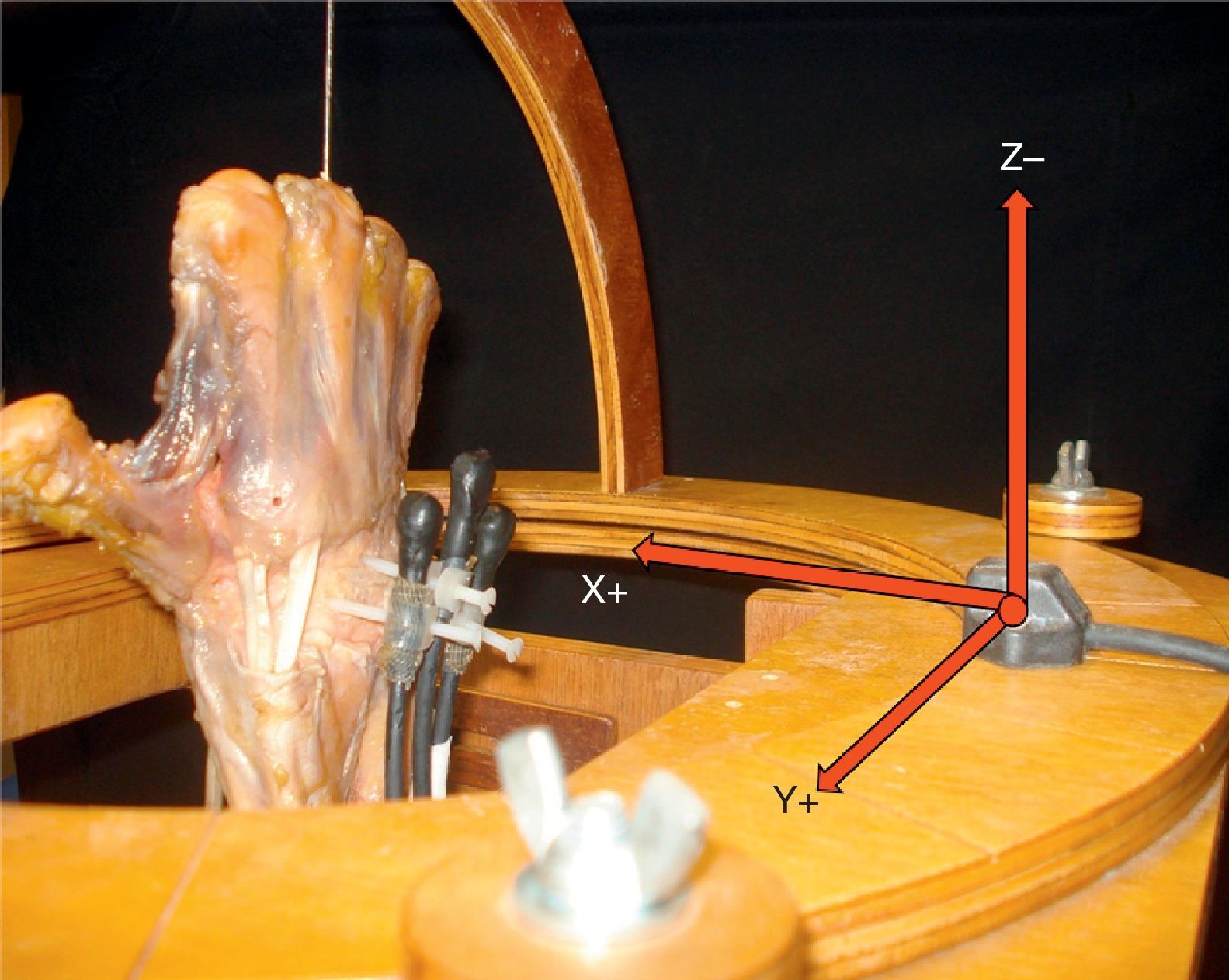
En 1994, Jantea et al.21 atribuyeron un papel específico en la estabilización dinámica de la muñeca al FCR, basándose en el hecho que dicho tendón utiliza la tuberosidad del escafoides para incrementar la distancia que lo separa del centro de rotación de la muñeca, y con ello su rendimiento mecánico. A partir de esa apreciación, se sugirió que la contracción isométrica del FCR podría generar un momento extensor sobre el escafoides que equilibraría la tendencia opuesta del escafoides a flexionarse bajo carga. Esta hipótesis se repitió en diversas citas bibliográficas, si bien nunca fue probada13,21–24. Contradiciendo esa hipótesis, Salvà-Coll et al.17 observaron que la carga isométrica aislada del FCR no producía extensión en el escafoides, sino que le provocaba el efecto contrario fuera cual fuera la posición de la muñeca al realizar la carga. Si bien la hipótesis defendida por Jantea et al.21 perdió verosimilitud, seguía siendo cierto que la potenciación del FCR suele mejorar la sintomatología en las inestabilidades dinámica del escafoides12–14. Según Salvá-Coll et al.16, el mecanismo por el cual se conseguiría esa mejoría tendría que ver con el hecho de que el FCR, aparte de pronar la hilera distal y el piramidal, es un supinador del escafoides. Por consiguiente, si el escafoides supina y el piramidal prona, es lógico que aparezcan fuerzas convergiendo sobre la articulación escafolunar que asegurarían su estabilidad (fig. 3).

Desde que se demostró la presencia de mecanorreceptores en los ligamentos de la muñeca8–12, un buen número de trabajos experimentales han intentado correlacionar propiocepción con los mecanismos de control muscular del carpo. Kobayashi et al.14, utilizando un complejo método estereoradiográfico biplanar, estudió el comportamiento cinético de la fila proximal del carpo cuando se aplicaban cargas isométricas a todos los músculos motores de la muñeca. Los resultados del presente estudio coinciden en gran manera con los de Kobayashi et al.14 al demostrar que el carpo intacto, bajo carga axial, tiende a rotar hacia la supinación. Posteriormente, Salvà-Coll et al.15, utilizando un modelo experimental parecido al precedente, estudió el efecto de la contracción muscular aislada sobre la alineación de determinados huesos del carpo. En base a esos estudios, se propuso clasificar los músculos motores de la muñeca en 2 grupos: aquellos que pronan la articulación mediocarpiana (ECU y FCR) y los que la supinan (FCU, ECRL y APL). Estos movimientos se transmitirían a la fila proximal a través de los ligamentos que cruzan la articulación mediocarpiana16. A partir de todo ello, se dedujo que la acción de los músculos supinadores protegería el espacio escafolunar, mientras que la acción de los músculos pronadores tendría un efecto protector del espacio lunopiramidal21.
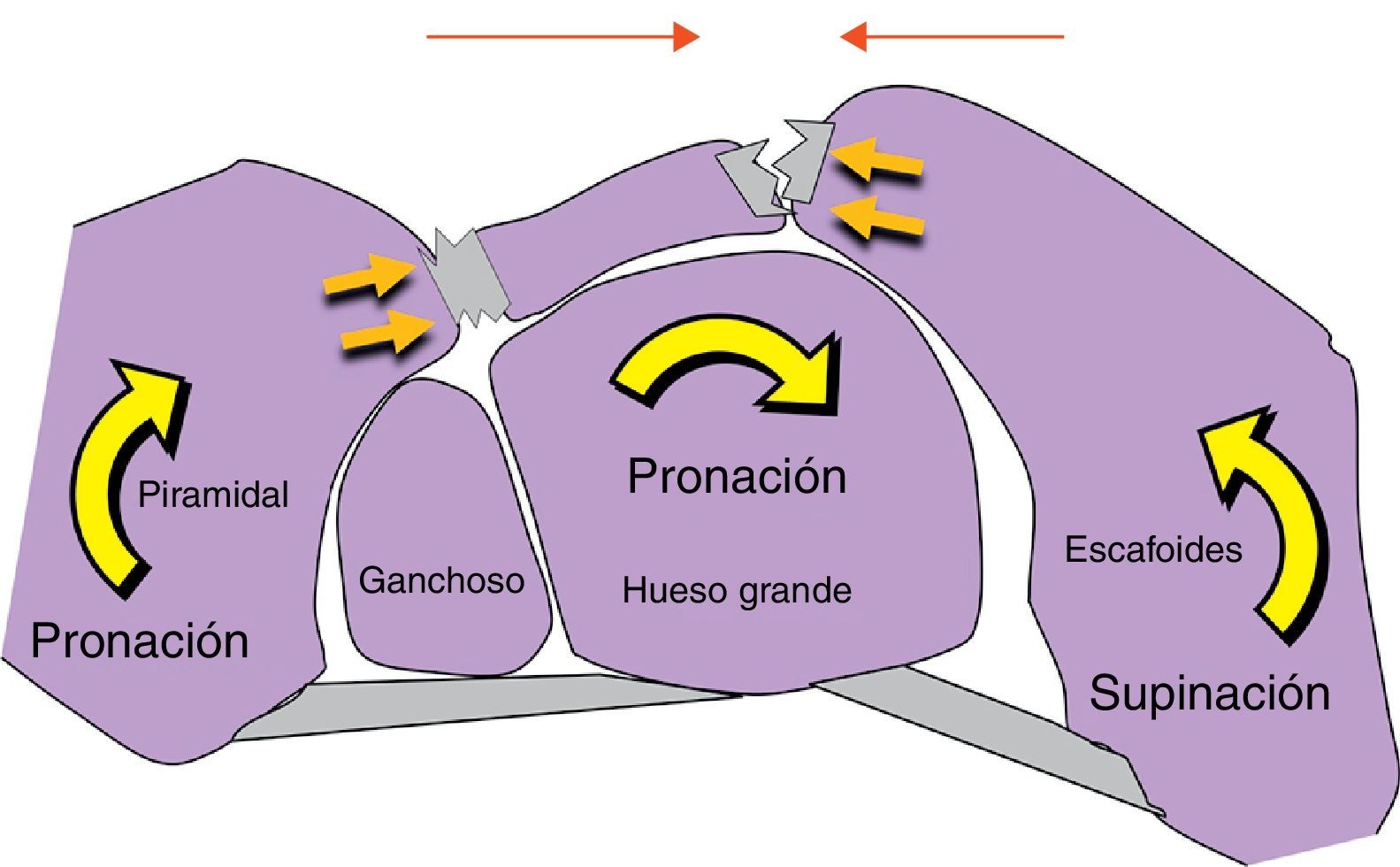
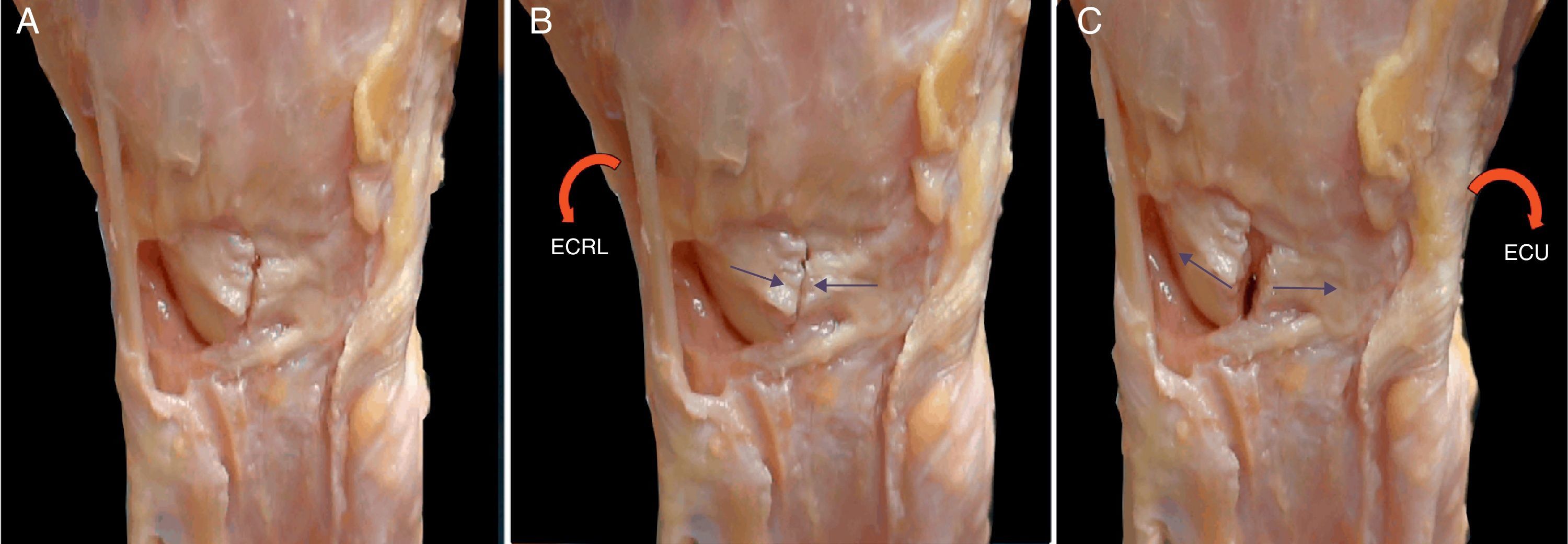
Todos los trabajos experimentales comentados hasta aquí han sido realizados sobre carpos estables, nuestro estudio es el primero en el que se valora el efecto de la musculatura del antebrazo sobre un carpo inestable. En condiciones normales, cuando el carpo anatómicamente intacto recibe carga a través de todos los tendones a la vez, la fila proximal tiende a la supinación. En cambio, si el carpo ya tiene una lesión escafolunar, la carga conjunta de todos los tendones produce el efecto contrario: el escafoides se colapsa en flexión y pronación, mientras que el piramidal prona y se extiende25. El presente estudio también ha valorado los efectos de la carga individual sobre un carpo con una lesión escafolunar. Los resultados parecen indicar que los músculos que pronan e inclinan cubitalmente el carpo son los que más desestabilizan un carpo ya de por sí inestable debido a una disrupción escafolunar. Los músculos de lado radial, en cambio, promueven la coaptación escafolunar y, con ello su estabilidad (fig. 4B). Todo ello nos lleva a evidenciar que, en caso de que exista ya una lesión de los ligamentos escafolunares, la acción aislada o conjunta de los músculos supinadores del escafoides FCR, APL y ECRL puede neutralizar la inestabilidad carpiana y conseguir que la muñeca sea asintomática. Por el contrario, la acción aislada o conjunta de los inclinadores cubitales del carpo, FCU y ECU y, sobre todo la de este último por su capacidad pronadora del escafoides, muy probablemente va a acabar desestabilizando aún más la muñeca ya de por sí inestable.
 Visión dorsal de un espécimen en el que se ha realizado una disociación escafolunar antes de someterlo a ninguna carga muscular. B) Podemos apreciar un ligero incremento de la coaptación del espacio escafolunar con la carga aislada del ECRL. C) Con la carga aislada del ECU se produce un incremento de la disociación escafolunar. Fuente: Tomado de Salvà et al.16.")
A) Visión dorsal de un espécimen en el que se ha realizado una disociación escafolunar antes de someterlo a ninguna carga muscular. B) Podemos apreciar un ligero incremento de la coaptación del espacio escafolunar con la carga aislada del ECRL. C) Con la carga aislada del ECU se produce un incremento de la disociación escafolunar.
Fuente: Tomado de Salvà et al.16.
Las conclusiones a que nos ha llevado el presente trabajo experimental son congruentes con los experimentos in vivo de Hagert et al.12. Tras estimular eléctricamente el ligamento escafolunar dorsal de voluntarios normales, se observó la aparición de un reflejo nociceptivo que provocó la contracción de algunos músculos y la inhibición de otros. Entre los primeros estaban los 3 músculos supinadores del escafoides del lado radial de la muñeca; mientras que entre los segundos estaba el ECU. Efectivamente, cuando los ligamentos escafolunares están lesionados, la contracción isométrica del ECU puede empeorar la inestabilidad inicial.
Desde un punto de vista práctico, cada grupo muscular debe ser reforzado o inhibido dependiendo del tipo de ligamento que está dañado. Si se ejercita un grupo muscular equivocado podemos incrementar los síntomas a los pacientes con alguna deficiencia ligamentosa. En concreto, nuestro trabajo sugiere que, ante la presencia de una inestabilidad escafolunar dinámica (cuando el colapso carpiano todavía no se ha producido), si se está en una fase aguda, o tras la reparación ligamentosa, se deben utilizar férulas de inmovilización que fuercen la supinación intracarpiana, a fin de relajar los ligamentos escafolunares, y la desviación cubital de la muñeca, para inhibir el efecto negativo del ECU. Secundariamente, hay que insistir en una fisioterapia específica para este tipo de inestabilidad, dirigida a potenciar los músculos del lado radial que supinan al escafoides (FCR, APL y ECRL), y a inhibir los músculos del lado cubital (ECU y FCU).
Nivel de evidenciaNivel de evidencia i.
Responsabilidades éticasProtección de personas y animales.Los autores declaran que los procedimientos seguidos se conformaron a las normas éticas del comité de experimentación humana responsable y de acuerdo con la Asociación Médica Mundial y la Declaración de Helsinki.
Confidencialidad de los datos.Los autores declaran que en este artículo no aparecen datos de pacientes.
Derecho a la privacidad y consentimiento informado.Los autores declaran que en este artículo no aparecen datos de pacientes.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.
