
La congruencia articular, la integridad ligamentaria y la compresión de las superficies articulares ocasionada por la contracción muscular se han considerado históricamente los tres pilares básicos para la estabilidad del carpo. En los últimos años se ha propuesto un nuevo factor para explicar los mecanismos de estabilización carpiana, la propiocepción y el control neuromuscular. La propiocepción en la muñeca se origina en órganos sensoriales localizados en los ligamentos y cápsulas articulares (los mecanorreceptores). La estimulación de los mismos inicia un reflejo involuntario que provoca una respuesta muscular selectiva dirigida a proteger la zona de la muñeca donde se ha originado la señal aferente. En este trabajo de revisión se pretende dar a conocer el concepto de propiocepción y control neuromuscular, el papel que tienen en la estabilidad del carpo y las posibles aplicaciones en la práctica clínica.
Articular joint congruity, static stability secondary to ligament integrity and dynamic joint surface compression due to muscular contraction have been defined classically as the key for carpal stability. Recently, a fourth factor in carpal stability has been proposed, involving the neuromuscular and proprioceptive control of joints. Proprioception of the wrist starts in sensory end organs located in ligaments and joint capsules (mechanoreceptors). When mechanoreceptors are stimulated, an afferent signal causes an involuntary spinal reflex that induces a selective muscular contraction in order to protect from ligament injury. The aim of this review is to provide an understanding of the role of proprioception and neuromuscular control in carpal instabilities, as well as descriptions of potential clinical applications.
Para considerar que una muñeca es clínicamente inestable, esta debe presentar una disfunción cinética o cinemática que provoque sintomatología1. Desde un punto de vista cinético, una muñeca es inestable cuando no es capaz de sostener cargas fisiológicas sin perder la relación articular normal. Una muñeca estable soporta estreses sin experimentar subluxaciones dolorosas. Desde un punto de vista cinemático, una muñeca es inestable cuando experimenta cambios súbitos e inesperados en la posición de los huesos carpianos durante su movimiento. En una muñeca estable los movimientos de los huesos carpianos son previsibles y sincrónicos, sin cambios abruptos. Y finalmente, desde un punto de vista clínico, una muñeca se considera inestable cuando presenta una inestabilidad cinética y/o cinemática y además sintomatología, siendo lo más frecuente el dolor o pérdida de la función.
La comprensión de los mecanismos por los cuales el carpo se mantiene estable ha ido evolucionando durante los últimos 50 años. En la década de los 70 del siglo pasado, Linscheid y Dobyns2 consideraron que la estabilidad dependía de forma primaria de la congruencia de las superficies articulares y de la integridad de los ligamentos. Es decir, de elementos puramente estáticos. Posteriormente, estos pioneros fueron un poco más allá y postularon la existencia de una estabilidad dinámica generada por la contracción muscular, que provocaba fuerzas de compresión a nivel articular3. En la década pasada se ha propuesto la existencia de un cuarto factor en la estabilidad carpiana, conocido como la propiocepción y el control neuromuscular4.
Concepto de propiocepción y control neuromuscularEl término propiocepción deriva del latín, “proprius” (“que pertenece a uno mismo”), y “-cepción” (“percibir”). Fue introducido en 1906 por el Premio Nobel de Medicina sir Charles Scott Sherrington, quien lo aplicó a las sensaciones originadas en áreas profundas del cuerpo humano5.
La propiocepción es uno de los sentidos somáticos más importantes6. Los sentidos somáticos son funciones del sistema nervioso que recogen información sensorial, pero que no son ninguno de los sentidos especiales (vista, oído, gusto, tacto, olfato y sentido vestibular). Clásicamente se han descrito tres sentidos somáticos: el dolor, el sentido termorreceptor y el sentido mecanorreceptor. La propiocepción se incluye en el tercero de los sentidos somáticos, y engloba la sensación de posición y el control neuromuscular de las articulaciones. La sensación de posición, a su vez, puede ser estática y dinámica. La sensación estática proporciona información sobre la posición de una parte del cuerpo respecto a otra (para saber cómo tenemos colocada una pierna sin necesidad de mirarla, por ejemplo). El sentido dinámico o cinestesia, por el contrario, proporciona información sobre la presencia y el grado de movimiento en las articulaciones cuando estas cambian de posición (es el sentido que permite correr sin estar pendiente de cómo colocar la pierna en cada zancada, por ejemplo). El tercero de los aspectos de la propiocepción es el control neuromuscular4, que hace referencia a la respuesta anticipatoria o inmediata de los músculos de alrededor de una articulación para mantener la congruencia articular de la misma7. Este sentido permite que una articulación reciba cargas mucho mayores que las que sus ligamentos pueden soportar de forma aislada (es el que explica por qué no se rompe el ligamento escafolunar dorsal, por ejemplo, en cada caída de alta energía sobre la mano con la muñeca en extensión).
La propiocepción es un proceso complejo en el que necesariamente existe una información aferente que provoca una respuesta muscular eferente, originada a su vez a diferentes niveles del sistema nervioso central. Existen dos niveles de propiocepción, el consciente o voluntario y el inconsciente o reflejo. El control neuromuscular pertenece a este último.
Los mecanorreceptoresLas señales aferentes que inician el control neuromuscular se originan en órganos sensoriales terminales (los mecanorreceptores), situados en los ligamentos y cápsulas articulares. Los mecanorreceptores son órganos especializados que convierten un estímulo físico específico, un cambio en la posición de la articulación o en la velocidad del movimiento, por ejemplo, en una señal nerviosa que puede ser descifrada y que puede generar una respuesta en el sistema nervioso central.
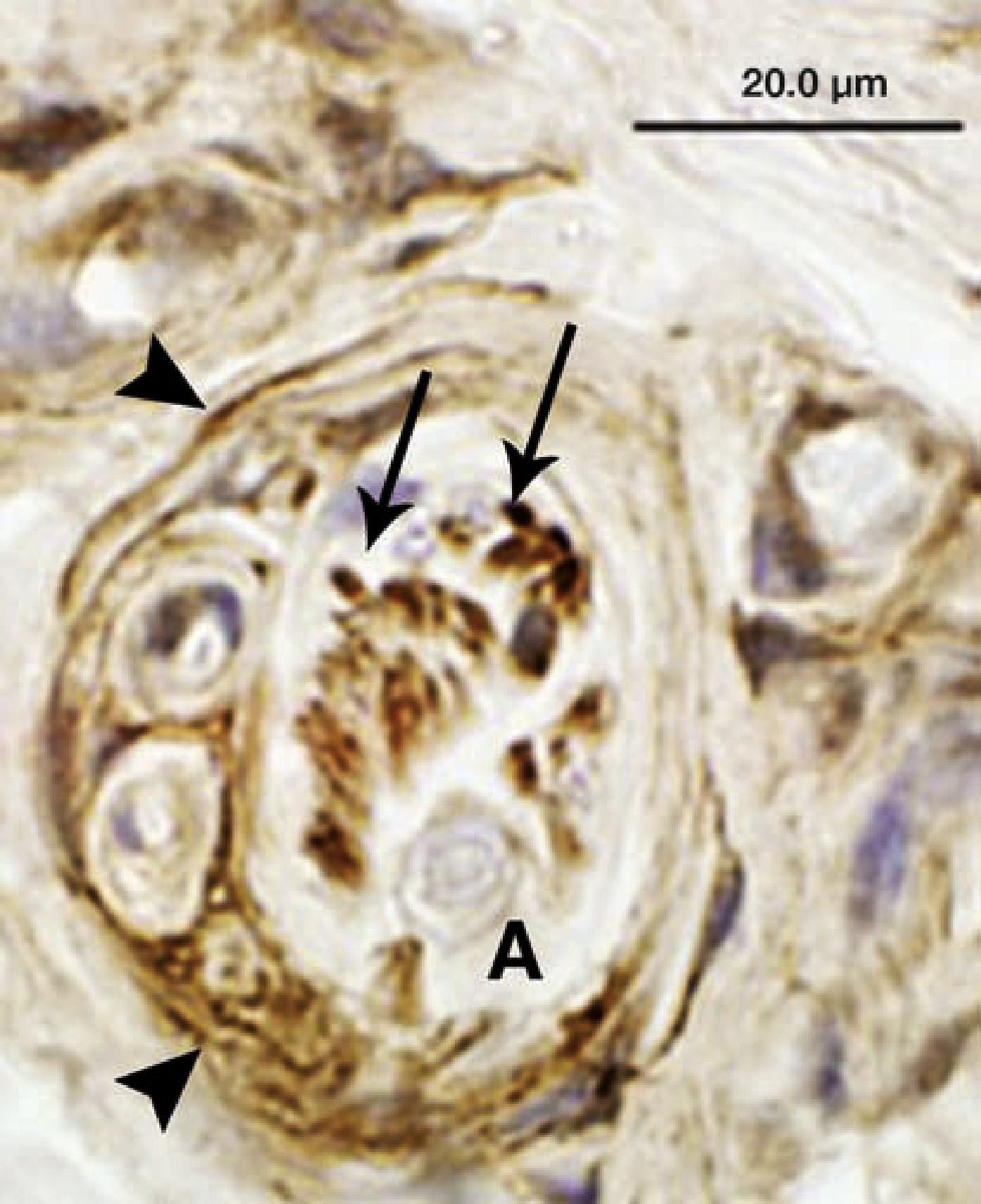
Las terminaciones nerviosas sensitivas localizadas en los ligamentos se clasifican en cuatro tipos, según su morfología y características neurofisiológicas8: tipo I o corpúsculos de Ruffini, tipo II o de Vater-Paccini, tipo III o de Golgi-Mazzoni y tipo IV, que son terminaciones nerviosas libres, responsables de la transmisión del dolor. Los corpúsculos de Ruffini, terminaciones nerviosas de umbral bajo y que proporcionan información continua sobre la posición articular, son el tipo de mecanorreceptores que predominan en el carpo9,10 (fig. 1).
, y por una cápsula perineural incompleta (cabezas de flechas). El axón aferente se localiza en el centro del receptor, y no tiene capacidad inmunoreactiva (A).")
Visión de un corpúsculo de Ruffini localizado en un ligamento escafolunar con la tinción inmunohistoquímica p75. El corpúsculo de Ruffini es el mecanorreceptor más prevalente en los ligamentos carpianos, y está constantemente enviando información sobre posiciones articulares estáticas. Este mecanorreceptor se caracteriza por tener terminaciones dendríticas que se ramifican entre las fibras de colágeno (flechas completas), y por una cápsula perineural incompleta (cabezas de flechas). El axón aferente se localiza en el centro del receptor, y no tiene capacidad inmunoreactiva (A).
Los mecanorreceptores se localizan normalmente en zonas cercanas a las inserciones ligamentosas en el hueso y en el tejido conectivo adyacente a las fibras de tejido conectivo denso de los ligamentos (región epiligamentosa)9-11, donde pueden actuar como monitores de la tensión y la fuerza aplicada al ligamento12.
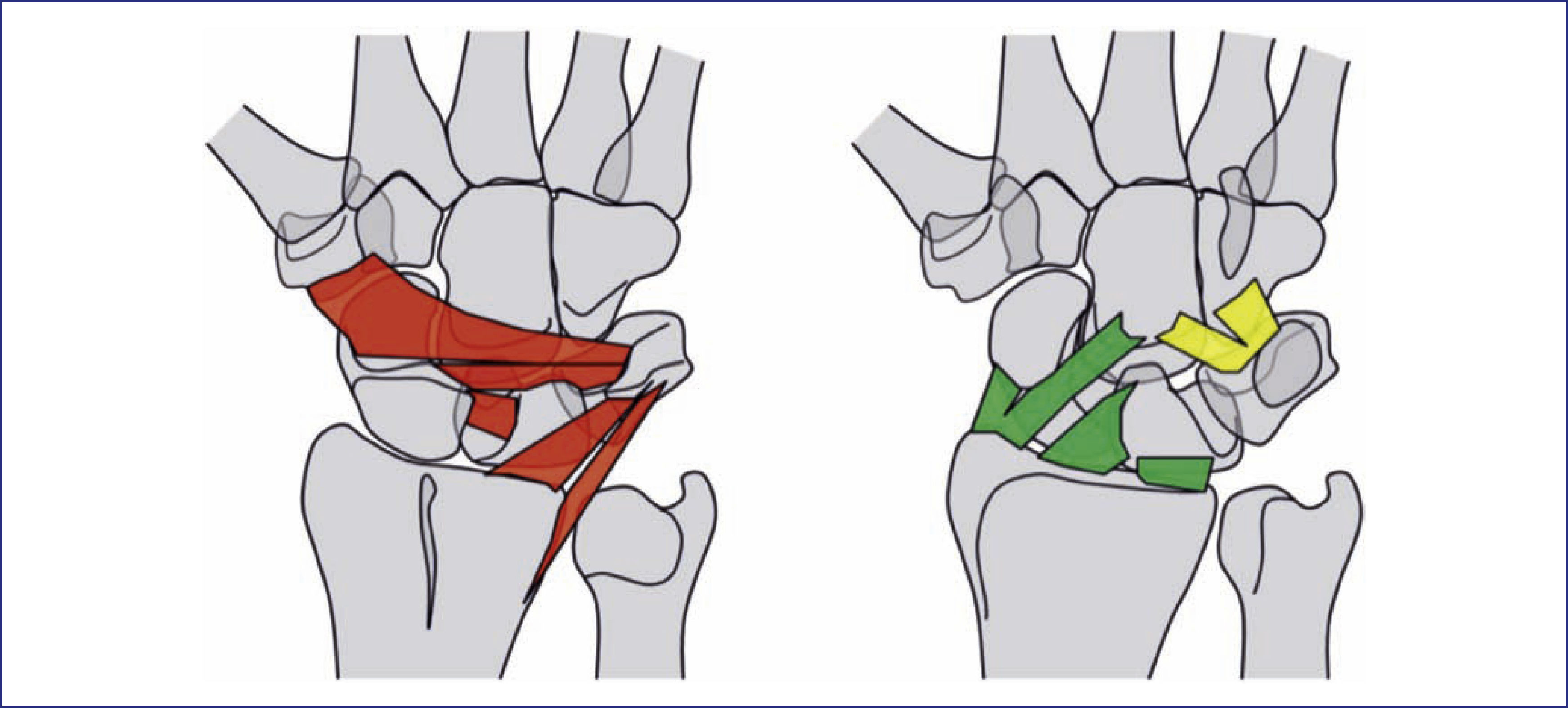
El patrón específico de inervación de los ligamentos carpianos se ha estudiado detalladamente9,11,13,14. El grado de inervación varía significativamente entre unos ligamentos y otros, siendo los ligamentos radiocarpiano dorsal e intercarpiano dorsal, junto con el todo el complejo escafolunar, los que tienen mayor número de mecanorreceptores13,14. El complejo ligamentoso volar piramidal-ganchoso-hueso grande tiene una inervación intermedia, y los ligamentos radiales de la cara palmar son los menos inervados9 (fig. 2). Por lo tanto, la descripción clásica de los ligamentos como estructuras de restricción puramente mecánica debería abandonarse. Seguramente, la función neurosensorial de los ligamentos es igual, si no más importante, que la función mecánica15-17. Y no solo eso; es obvio que no todos los ligamentos carpianos son iguales. A los ligamentos muy inervados los podemos considerar como ligamentos sensorialmente importantes, ya que están enviando información aferente de forma continuada.
, los de inervación intermedia en amarillo (complejo volar piramidal-ganchoso-hueso grande) y los de baja inervación en verde (radiocarpianos volares).")
Representación de los ligamentos carpianos en función de la concentración de mecanorreceptores. Los ligamentos con gran cantidad de mecanorreceptores están representados en rojo (radiocarpiano dorsal, intercarpiano dorsal y escafolunar), los de inervación intermedia en amarillo (complejo volar piramidal-ganchoso-hueso grande) y los de baja inervación en verde (radiocarpianos volares).
Estos hallazgos indican que la zona escafolunar sigue teniendo un papel relevante para la estabilidad del carpo. Por otro lado, es lógico que los ligamentos radiales volares estén pobremente inervados, ya que están continuamente actuando en contra de la tendencia a la traslación cubital del carpo provocada por la inclinación hacia cubital de la superficie articular del radio distal. De forma sorprendente, los ligamentos que se originan o insertan en el dorso del piramidal, un hueso habitualmente menospreciado en la patología carpiana, son estructuras altamente pobladas de mecanorreceptores. Quizás esto podría ayudar a explicar por qué la patología en el lado cubital de la muñeca, que normalmente es consecuencia de un problema de tejidos blandos, suela ocasionar más clínica dolorosa que la mayoría de problemas óseos o articulares del lado radial.
Cuando los mecanorreceptores del carpo son estimulados, envían una señal aferente a través de los nervios que inervan la zona correspondiente de la muñeca, y que llega al sistema nervioso central. En ocasiones esta señal genera movimientos voluntarios iniciados en la corteza cerebral. Pero otras veces se requiere una respuesta muscular inmediata mucho más rápida a la llamada de los mecanorreceptores. En estos casos se genera un reflejo involuntario a nivel espinal, que hace que determinados músculos se contraigan y otros se inhiban, para proteger a los ligamentos que están en peligro. La capacidad de desencadenar estos reflejos espinales protectores en una situación de lesión podría ser mucho más importante para la estabilidad articular que la respuesta voluntaria. Más aun, la velocidad en la que se produce este feed-forward propioceptivo y que genera una respuesta protectora a tiempo es la clave para la protección articular.
Hasta la fecha, el control de este reflejo neuromuscular en la muñeca in-vivo solo se ha estudiado a nivel del complejo escafolunar, usando la electromiografía16 y los potenciales de acción sensitivos18. Estos trabajos han mostrado que tras la estimulación directa del ligamento se genera una respuesta muscular indicativa de un reflejo espinal protector rápido16. Inclusive, si el ligamento se desensibiliza anestesiando el nervio interóseo posterior (que inerva al ligamento escafolunar dorsal), se produce una reducción de los reflejos protectores19. Y si todo el complejo ligamentoso escafolunar se secciona, se reducen significativamente las aferencias proximales18.
Estos hallazgos indicarían que practicar una denervación del nervio interóseo posterior o anterior, cuando su aspecto es normal y funcionan correctamente, podría tener efectos adversos en el control neuromuscular inconsciente de la muñeca19.
Control neuromuscular en las inestabilidades carpianasControl neuromuscular en la transmisión de cargas de la muñeca normalCómo se desplazan los huesos de la muñeca al transmitir carga, y cómo consiguen mantener su relación se sigue explicando hoy en día a través de modelos simplificados.
Al recibir una carga axial en posición neutra, la hilera distal del carpo sufre una rotación en forma de pronación. Se trata de un movimiento rotacional intracarpiano, independiente del que ocurre en el antebrazo. Este movimiento de la hilera distal se transmite al escafoides a través de los ligamentos escafo-hueso grande y escafo-trapecio-trapezoide. Como consecuencia, el escafoides se flexionará y pronará. El piramidal, en cambio, se ve sometido a la tracción del ligamento piramidal-ganchoso (producida por la pronación de la hiera distal) y en consecuencia, se opone a la flexión de la fila proximal del carpo, promovida por el escafoides. La dirección de rotación entre los tres huesos de la hilera proximal bajo carga axial es, por lo tanto, diferente y eso genera un par de fuerzas progresivo de torsión y coaptación intercarpiana a nivel de la hilera proximal que contribuye a su estabilidad20,21.
Las cargas que cruzan la muñeca durante las actividades de la vida diaria son considerables. Se calcula que la muñeca soporta hasta 14 veces la fuerza aplicada en la punta de los dedos. Es decir, si se es capaz de alcanzar los 30 o 40kg al realizar una prensión pluridigital, la muñeca probablemente deberá resistir fuerzas de compresión de hasta 300kg o más22. Obviamente, un solo ligamento no puede resistir semejante magnitud de cargas, y por ello se considera que la acción conjunta de varios ligamentos es necesaria para evitar la flexión excesiva del escafoides, extensión del piramidal y pronación de la hilera distal. Pero incluso varios ligamentos juntos no son suficientes para garantizar la estabilidad carpiana. Valga como ejemplo, el ligamento escafolunar dorsal, el más resistente de los componentes del complejo interóseo escafolunar, solo resiste un promedio de 260N (26kg)23. Si no existen más lesiones ligamentarias es porque los ligamentos están protegidos por la musculatura que, como se ha mencionado anteriormente, supone la forma de estabilización secundaria del carpo24. La acción de la musculatura también podría explicar la enorme incidencia de lesiones ligamentosas asintomáticas, diagnosticadas casualmente u observadas en especímenes cadavéricos.
En la primera parte de este artículo hemos descrito cómo es el circuito que lleva a un determinado músculo o grupo de músculos a activarse cuando su aportación es necesaria para la estabilidad. A continuación, describiremos el efecto concreto de la musculatura en diferentes condiciones, tanto fisiológicas como patológicas, que afectan al carpo.
A pesar de que parecía lógico pensar que la musculatura jugaba un papel clave en la estabilidad, como en otras articulaciones, hasta hace poco existía muy poca bibliografía al respecto. En 1980, Kauer describió al Extensor Pollicis Brevis (EPB), Abductor Pollicis Longus (APL) y Extensor Carpi Ulnaris (ECU), como un sistema colateral ajustable de la muñeca, pero no realizó ninguna mención del papel de estos músculos como estabilizadores del carpo25. En 1992, Ruby y colaboradores sugirieron que todos los tendones que cruzan la muñeca podrían tener un efecto dinámico en la estabilidad del carpo, pero tampoco definieron el papel de cada músculo en la estabilización dinámica del carpo26.
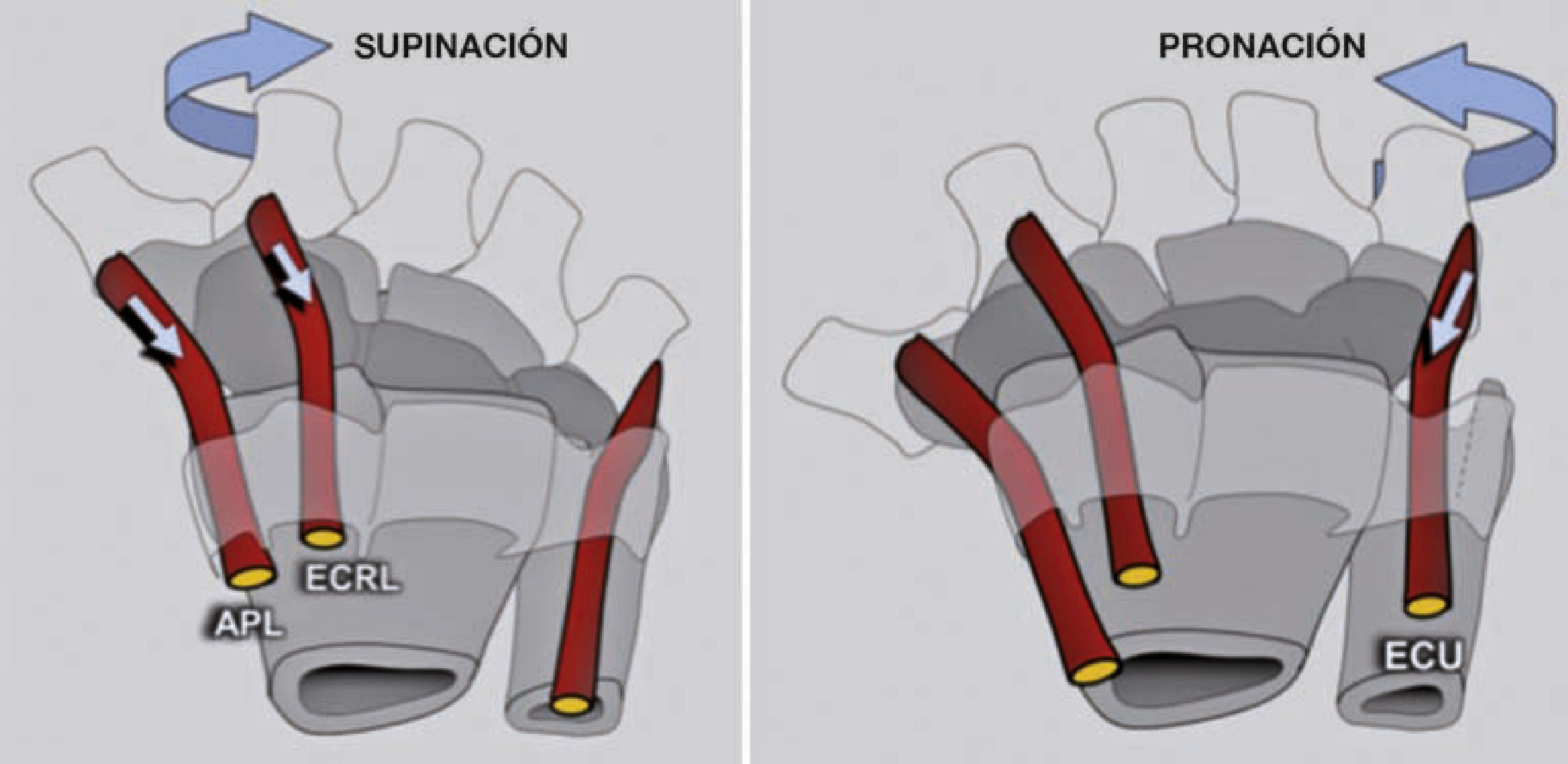
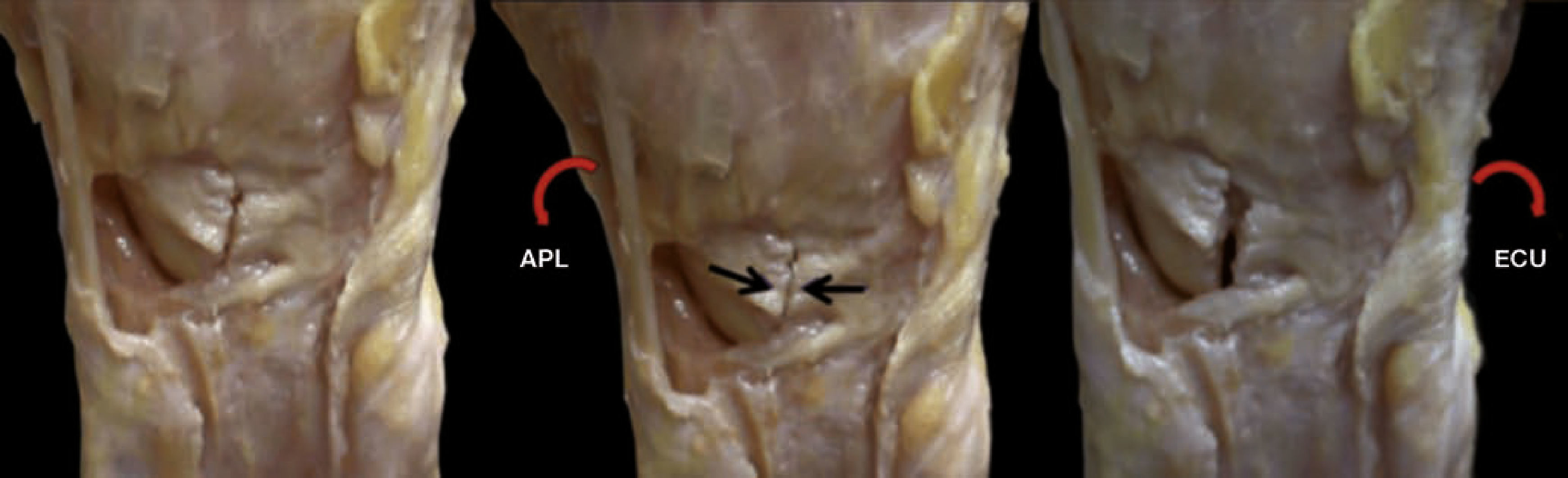
Los estudios biomecánicos llevados a cabo por nuestro grupo han demostrado que la contracción simultánea de los principales músculos motores de la muñeca APL, extensor carpi radialis brevis (ECRB), extensor carpi radialis longus (ECRL), flexor carpi radialis (FCR), flexor carpi ulnaris (FCU) y ECU, genera una supinación de la hilera distal, que es el movimiento opuesto al que ocurre cuando se aplica una carga axial externa siguiendo el eje longitudinal del tercer metacarpiano. La acción aislada de cada músculo con la muñeca en posición neutra, por el contrario, tiene un efecto individual sobre la posición de los huesos del carpo. Los músculos que predominantemente provocan un movimiento de rotación en el sentido de supinación en la hilera proximal y distal son el FCU, el APL y el ECRL. Los músculos que provocan pronación son el ECU y el FCR (fig. 3). La carga aislada del ECU provoca una pronación marcada de la hilera proximal y de la distal. Sin embargo, la carga aislada del FCR provoca pronación de la hilera distal y del piramidal, pero provoca la supinación del escafoides27-29.

La rotación que provocan estos músculos en el carpo está ocasionada por el cambio de dirección del tendón durante su trayecto y por la localización de su inserción. Por ejemplo, el tendón del ECU tiene una dirección oblicua desde su paso por el dorso del cúbito hasta la esquina anteromedial del quinto metacarpiano. Cuando este músculo se contrae, además de provocar extensión e inclinación cubital de la muñeca, genera un momento de pronación en la hilera distal. Nuevamente, el término “pronación” describe un movimiento de rotación de la hilera distal del carpo en pronación en relación con el radio.
La diferente acción aislada de estos músculos indica que pueden tener un efecto beneficioso o perjudicial sobre la estabilidad carpiana, dependiendo de la integridad ligamentosa u ósea del carpo.
Control neuromuscular en las inestabilidades carpianas disociativasInestabilidad escafolunarLa lesión completa del complejo escafolunar provoca que el escafoides se coloque en una posición anómala de flexión y pronación, y su polo proximal se subluxe hacia el margen dorsorradial del radio. El semilunar, que ya no está controlado lateralmente por el escafoides, sigue al piramidal hacia la extensión, a la vez que experimenta un característico desplazamiento en forma de supinación y traslación cubital. Este patrón de desplazamiento se conoce con el acrónimo DISI (“Dorsal Intercalated Segment Instability”), y se asocia a una diástasis del espacio escafolunar, ocasionando la consiguiente incongruencia articular radiocarpiana y mediocarpiana.
En nuestro modelo experimental, los músculos que por su acción tienen un efecto potencialmente protector en los casos de una lesión escafolunar, son el grupo de los supinadores de la hilera distal. Es decir, el APL, ECRL y el FCU. El FCR, que es pronador de la hilera distal pero supinador del escafoides, también tiene un efecto beneficioso27.
De hecho, el FCR es el único músculo al que se le ha atribuido históricamente un papel específico como estabilizador del escafoides. En 1994, Jantea sugirió que el FCR era un estabilizador dinámico del escafoides durante el movimiento del carpo. Se basó en el hecho de que el tendón de este músculo utiliza el polo distal del escafoides como polea de reflexión, y por tanto su contracción provocaría una extensión del escafoides, evitando el colapso en flexión del escafoides bajo carga30. Linscheid y Dobyns sugirieron que la fuerza dorsal generada por el FCR sobre la tuberosidad del escafoides era entre un 40 y un 70% del total de la tensión generada por el músculo. Concluyeron que el FCR sería un estabilizador dinámico del carpo, ya que proporciona un soporte en el polo distal del escafoides y contrarresta la tendencia natural del escafoides a rotar en flexión cuando se somete a carga3.
Sin embargo, en el estudio experimental llevado a cabo por Salvá-Coll y colaboradores27 se observó que el FCR siempre provoca flexión del escafoides, independientemente de la posición de la muñeca. Pero también se observó que el FCR provoca supinación del escafoides (por su localización medial a la tuberosidad del escafoides) y pronación del piramidal (por su inserción en la base del segundo metacarpiano, volar y radial respecto al eje central del carpo). Si el escafoides supina, mientras que el piramidal prona, el efecto resultante es el de disminución del espacio escafolunar, y por tanto de disminución de la tensión longitudinal en el ligamento escafolunar. Este podría ser el mecanismo dinámico de protección del ligamento escafolunar dorsal bajo carga, y podría explicar el efecto beneficioso de la potenciación del FCR en las inestabilidades escafolunares predinámicas y dinámicas observado en la práctica clínica.
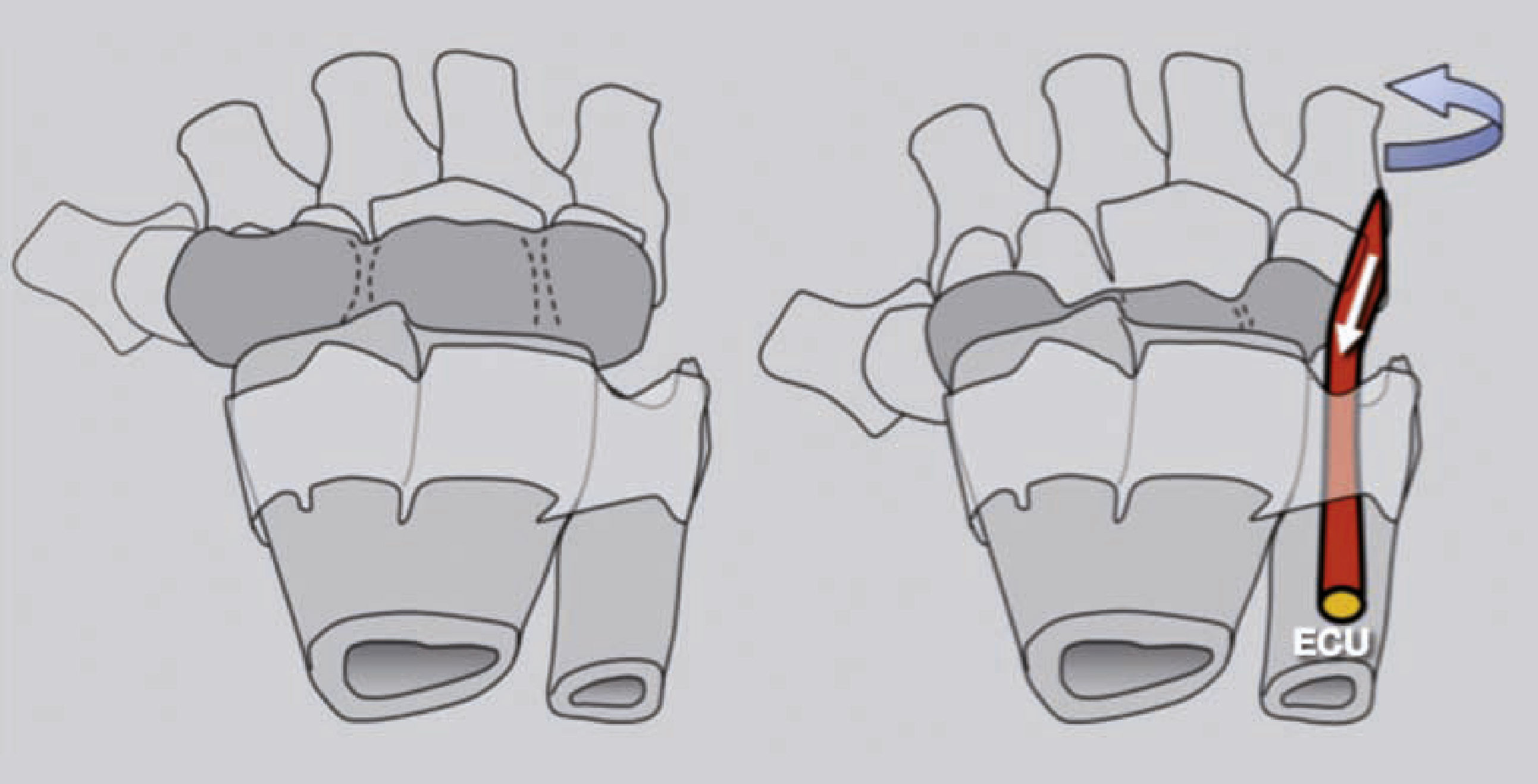
Por el contrario, el ECU tiene un efecto potencialmente adverso sobre el ligamento escafolunar31. La carga aislada de este tendón provoca una pronación de las hileras proximal y distal, potenciando la tendencia natural del escafoides a la pronación, y consecuentemente aumentando la tensión a nivel escafolunar (fig. 4).

Estos resultados coinciden con los obtenidos por Hagert y colaboradores16,18, cuando pusieron de manifiesto por primera vez el reflejo neuromuscular en la muñeca. Como se ha descrito previamente, la estimulación del ligamento escafolunar dorsal provocó la contracción de varios grupos musculares y la inhibición de otros como respuesta. Los músculos supinadores recibieron una señal de activación, mientras que el ECU, potente pronador de la hilera distal, la recibió de inhibición.
Inestabilidad lunopiramidalSi la disrupción de los ligamentos es a nivel del complejo piramidolunar, el semilunar se ve desprovisto de todo control por parte del piramidal. Es arrastrado por el escafoides hacia una anormal flexión y pronación, un patrón de desplazamiento conocida con el acrónimo VISI (“Volar Intercalated Segment Instability”). Por su parte, el piramidal rota anormalmente en flexión y supinación y, al no poseer un soporte rígido (como es el radio para la columna externa) migra proximalmente, sobre todo en inclinación cubital. Esto genera una incongruencia en la articulación mediocarpiana y una crepitación típica al desviar la muñeca hacia cubital.
En el estudio experimental sobre la estabilización dinámica de la inestabilidad lunopiramidal, León López y colaboradores32 encontraron que el ECU es el único músculo que provoca extensión y pronación del piramidal, es decir, el único músculo que contrarresta la tendencia natural a la flexión y supinación del mismo cuando el ligamento lunopiramidal está lesionado (fig. 5).
Control neuromuscular en las inestabilidades carpianas no-disociativas
Una inestabilidad carpiana se denomina “no-disociativa” cuando hay una disfunción de toda la hilera proximal del carpo, manifestada a nivel de la articulación radiocarpiana (RC), mediocarpiana (MC) o en ambas33. Este tipo de inestabilidad ocurre sin que los complejos escafolunar o lunopiramidal estén lesionados, y por ello también se la ha denominado “inestabilidad de la hilera proximal”. La inestabilidad MC palmar (IMCP) o inestabilidad no-disociativa palmar es el tipo de inestabilidad no disociativa más frecuente.
Cuando una muñeca normal se mueve desde la posición de inclinación radial a la de inclinación cubital, toda la hilera proximal pasa de flexión a extensión. Este cambio de posición es suave y progresivo si los ligamentos MC y la contracción coordinada del FCU y ECU funcionan con normalidad. En este sentido, son especialmente importantes las fibras más proximales del complejo ligamentoso piramidal-hueso grande-ganchoso y el ligamento escafo-trapecio-trapezoide34.
La IMCP es una alteración cinemática de la hilera proximal que se presenta cuando las anteriores estructuras estabilizadoras no funcionan correctamente, ya sea por rotura o elongación, junto a un pobre control propioceptivo33. En estas muñecas la hilera proximal permanece anormalmente flexionada al pasar de inclinación radial a inclinación cubital, hasta que se produce una extensión súbita al final del movimiento. En ocasiones este cambio brusco se acompaña de un resalte visible o incluso audible (“catch-up clunk”).
La sección de los ligamentos escafo-trapecio-trapezoide, piramidal-hueso grande, piramidal-ganchoso y radiocarpiano dorsal permite crear un modelo experimental de IMCP para valorar el papel del control neuromuscular. En esas circunstancias, solo el efecto del ECU consigue contrarrestar la excesiva flexión de la hilera proximal. La pronación de la hilera distal genera un momento extensor en el piramidal que permite compensar la tendencia característica a la flexión de las muñecas con IMCP (fig. 6).

Nuestros resultados de la hilera proximal se han visto reforzados por el trabajo de Ritt y colaboradores, quienes han demostrado cómo simplemente aumentando la tendencia hacia la pronación de la hilera proximal, mediante una transferencia parcial del ECRB al dorso del ganchoso, se consiguió mejorar a 11 de 13 muñecas que presentaban una IMCP sintomática35.
Control neuromuscular en la articulación trapeciometacarpianaLa articulación trapeciometacarpiana presenta una paradójica relación entre movilidad y estabilidad que le confiere una alta complejidad mecánica. Se trata de una articulación mínimamente constreñida, en la que el complejo ligamentoso dorsal es la estructura más resistente y con mayor concentración de mecanorreceptores, especialmente corpúsculos de Ruffini36.
La sección “in-vitro” de los diferentes grupos de ligamentos ha confirmado que el grupo dorsal es el principal estabilizador de la base del metacarpiano del pulgar. Al estudiar el papel de la musculatura intrínseca y extrínseca la base del metacarpiano del pulgar sobre la estabilidad de la articulación no artrósica y con ligamentos íntegros en un modelo cadavérico, los músculos OPP e IOD I (oponente del pulgar y primer interóseo dorsal) resultan ser los principales estabilizadores de la articulación, mientras que la acción del APL provoca la subluxación de la base del metacarpiano y por lo tanto la desestabiliza37.
Posibles aplicaciones clínicasLa propiocepción se puede entrenar. Los programas de rehabilitación que mejoran la propiocepción también mejoran de forma objetiva el estado funcional, independientemente de los cambios en la laxitud articular6, y esta mejoría ya se consigue mejorando solo un aspecto de la propiocepción, el sentido de la posición. Sin lugar a dudas, aprender a mejorar la velocidad de los reflejos neuromusculares protectivos es un reto mayúsculo para el futuro de la rehabilitación del carpo.
Se han diseñado diferentes tipos de ortesis para tratar las inestabilidades carpianas. Algunas de ellas pretenden corregir la posición estática de los huesos carpianos, como las diseñadas para la IMCP, en las que se empuja al pisiforme hacia dorsal para corregir la tendencia a la flexión de la hilera proximal38. Pero hoy en día podemos ir más allá. La pronación de la hilera distal del carpo parece ser perjudicial para el espacio escafolunar. Por lo tanto, en los casos en los que exista una lesión a este nivel o se quiera proteger la zona tras una cirugía, se pueden diseñar inmovilizaciones en las que la hilera distal esté ligeramente supinada y la muñeca en extensión e inclinación cubital, para neutralizar el efecto pronador del ECU.
Conocidos los efectos de cada grupo muscular sobre las principales inestabilidades carpianas, se puede establecer un programa de potenciación muscular “a la carta” para cada patología. En el manejo conservador de las lesiones escafolunares o tras cirugías reparadoras a dicho nivel, los músculos que por su acción tienen un efecto potencialmente protector son el APL, ECRL, FCU y FCR. Los tres primeros por ser supinadores de la hilera distal y el FCR por ser supinador del escafoides. El ECU, por el contrario, tiene un efecto pronador perjudicial para la patología escafolunar y debería tratar de inhibirse.
De forma opuesta, los casos menos frecuentes de inestabilidad lunopiramidal dinámica podrían beneficiarse de la potenciación y entrenamiento propioceptivo del músculo ECU. En el tratamiento conservador de las IMCP se puede plantear un programa de entrenamiento para potenciar también el ECU. Y, dado que los dos principales pronadores de la hilera distal son el ECU y el FCR, podría ser útil alternar ejercicios isométricos de ambos mediante un movimiento desde extensión-inclinación cubital hasta flexión-inclinación radial (el movimiento contrario al “lanzador de dardos” o “reverse dart-throwing”)34.
Sin lugar a dudas, cuanto más eficaz sea el programa de reeducación neurosensorial, menor será la necesidad de cirugía, especialmente en las personas con inestabilidades dinámicas o con una hiperlaxitud ligamentosa generalizada4. Pero para los casos con indicación quirúrgica vale la pena tener en cuenta algunas consideraciones.
Dado que la inervación de la muñeca es importante para tener un reflejo neuromuscular correcto16,18, y que la denervación de la muñeca disminuye radicalmente este reflejo19, cualquier cirugía sobre una inestabilidad carpiana debe intentar minimizar el daño a la inervación de la articulación. Una forma sencilla de conseguirlo es utilizar los abordajes especialmente diseñados para preservar la inervación39.
En la misma línea, el retensado mediante termocoagulación artroscópica de los ligamentos incompetentes se ha descrito como una opción de tratamiento en las inestabilidades carpianas40. A pesar de los resultados prometedores publicados, creemos que el efecto beneficioso de crear un tejido más rígido no compensa el hecho de destruir los mecanorreceptores y terminaciones sensitivas contenidos en esos ligamentos, con la alteración de la propiocepción que eso comporta.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.