












En este trabajo se presenta un modelo simplificado de elementos rígidos y resortes (MERR) para el estudio del balanceo asimétrico de cuerpos rígidos y se considera la hipótesis de pequeñas rotaciones, lo que permite simplificar la formulación matemática. Asimismo, se describe el fenómeno de la asimetría en el balanceo de bloques rígidos y se presentan diversos ejemplos numéricos tanto para validar el modelo como para estudiar la dinámica de bloques rígidos asimétricos. La respuesta máxima del bloque depende del tipo de asimetría, así como también de la dirección de la carga, por lo que estas deberían incluirse como variables en el estudio del balanceo asimétrico de cuerpos rígidos.
This paper deals with the numerical modelling of rigid blocks by means of a rigid body spring model (RBSM). The hypothesis of small rotations has been considered in order to simplify the mathematical formulation. The asymmetric rocking motion is described. Extensive numerical simulations have been carried out in order to validate the numerical model, as well as to study the dynamical behaviour of asymmetric rigid bodies. The maximum response depends on the type of asymmetry and the direction of the load, which should become new variables in the study of asymmetric rocking motion.
El estudio del comportamiento dinámico de cuerpos rígidos es un campo importante en la evaluación sísmica de estructuras debido a que algunas de ellas o ciertos elementos estructurales se pueden modelar como cuerpos rígidos. Algunos ejemplos típicos son: a)construcciones formadas por grandes bloques de piedra [1,2]; b)estructuras de mampostería simple, que generalmente fallan bajo acciones sísmicas formando grandes macrobloques [3,4]; c)máquinas, equipo, mobiliario, reactores nucleares, estatuas y objetos de arte [5–7], y d)edificios con ciertos tipos de aisladores de base que permiten la disipación de energía sísmica por impacto [8,9].
Los primeros estudios datan de finales del sigloxix[10,11]; sin embargo, el trabajo de Housner [12] se considera como el primer estudio sistemático sobre la dinámica de cuerpos rígidos. Housner propuso una ecuación en 2 partes para cada signo del ángulo de balanceo, mientras que el amortiguamiento se reproduce mediante un coeficiente de restitución.
Después de Housner, varios autores han estudiado el balanceo de cuerpos rígidos rectangulares simplemente apoyados [13–18], pero son pocos los que han analizado el balanceo asimétrico de bloques rígidos [19–22]. Se ha observado que la asimetría cambia la dinámica del balanceo de los cuerpos rígidos. Por ejemplo, de acuerdo con [22], los cuerpos que tienen múltiples puntos de rotación son significativamente más frágiles que los apoyados en 2 puntos de rotación. Esto significa que múltiples puntos de rotación son equivalentes a un bloque más esbelto que esté apoyado únicamente en 2 puntos. Asimismo, bajo ciertas condiciones permitir el balanceo de un bloque hacia un solo lado es más peligroso que si se balanceara en las 2 direcciones [23].
A pesar de los avances significativos de las anteriores investigaciones, el estudio del comportamiento asimétrico continúa siendo un campo poco estudiado. El movimiento del balanceo se puede modelar sencillamente mediante la ecuación propuesta por Housner, para lo cual simplemente se necesitan los parámetros geométricos del bloque (véase la sección 2). Sin embargo, cuando se tiene un balanceo asimétrico, la formulación matemática se vuelve bastante compleja [15,16].
Varios autores han utilizado otras formulaciones matemáticas, como el Método de los Elementos Discretos, con el fin de evitar la complejidad matemática de la formulación clásica [1,24,25]. Sin embargo, este método presenta el inconveniente del gran tiempo de cómputo que requiere, ya que debe actualizar constantemente la geometría del modelo.
De este modo, el objetivo principal de este trabajo es presentar un Modelo simplificado de Elementos Rígidos y Resortes (MERR) para el estudio del balanceo asimétrico de cuerpos rígidos. Este modelo se basa en el principio de D’Alembert y en pequeñas rotaciones, con lo cual se obtiene una formulación que puede ser sencillamente programada y cuyo costo computacional es bajo. Asimismo, se describe el fenómeno de la asimetría en el balanceo de bloques rígidos y finalmente, se presentan diversos ejemplos numéricos tanto para validar el modelo como para estudiar la dinámica de bloques rígidos asimétricos.
2Balanceo asimétrico de cuerpos rígidosLa asimetría de un bloque rígido no se encuentra ligada a su forma geométrica, como se podría pensar, sino a su comportamiento dinámico. Es decir, la respuesta del bloque será diferente si se mueve en una dirección o en otra. Por ejemplo, la figura 1 muestra la respuesta típica del balanceo libre de 2 cuerpos rígidos, uno que presenta simetría y otro con asimetría [26]. Para el primer caso (fig. 1a), la amplitud del ángulo de balanceo decrece conforme se va perdiendo energía debido al impacto del bloque al pasar por la posición de reposo. Sin embargo, cuando se presenta el balanceo asimétrico (fig. 1b), la amplitud del ángulo de balanceo depende de la dirección de la rotación. En este caso en particular, el ángulo máximo de balanceo cuando el ángulo es positivo es siempre medio grado más que cuando el ángulo es negativo, lo cual significaría que en lugar de perder energía después del impacto el sistema estaría ganando energía. Para este ejemplo, el balanceo asimétrico se debe a que el bloque presenta daño en uno de sus lados, lo que modifica precisamente la dinámica del bloque rígido [26].
![Respuestas típicas de bloques rígidos a balanceo libre: a)balanceo simétrico; b)balanceo asimétrico [24].](https://static.elsevier.es/multimedia/02131315/0000003100000001/v3_201706012355/S0213131514000108/v3_201706012355/es/main.assets/gr1.jpeg?xkr=ue/ImdikoIMrsJoerZ+w997EogCnBdOOD93cPFbanNdXKeWo41MsZkw/vID64cuEiPuJOyFxneHZSkizm96flfSXRuq9PKMsoqi+EW0rIT6zM/RGH8Au7INNV0XN5Ctd4/QBZUIfx/EeK5lH7ggL71WJonP4FOcoL0kebeUrk229Fy/Afu9OStHFc9sQp6hKyK1dUrK2F3oPkUdTcLOuAGX5wYS8KEEcypbATvyhLInAMAEnj5LMe2tS0bnoZe7ww2ZAFy8TB7SDxGvv0/oWZ7D+9I3qLUEpN4kLBWEWAuDXnuvstrt4kkpdn4GJK/FLJm8R63XTop3sr0wwqkQ9pQ== "Respuestas típicas de bloques rígidos a balanceo libre: a)balanceo simétrico; b)balanceo asimétrico [24].")
Respuestas típicas de bloques rígidos a balanceo libre: a)balanceo simétrico; b)balanceo asimétrico [24].
Con base en esto, se ha observado que la simetría del movimiento de un bloque rígido depende fundamentalmente de la simetría existente entre los puntos de rotación del bloque RP con respecto a su centro de gravedad (fig. 2a). De acuerdo con Prieto y Lourenço [27], la dinámica de un bloque rígido es invariante con respecto a los signos del ángulo de balanceo, es decir, con respecto a una línea vertical imaginaria que pasa por los puntos de rotación (fig. 2b).
![Simetría dinámica: a)cuerpo asimétrico con simetría dinámica; b)simetría de los puntos de rotación [27].](https://static.elsevier.es/multimedia/02131315/0000003100000001/v3_201706012355/S0213131514000108/v3_201706012355/es/main.assets/gr2.jpeg?xkr=ue/ImdikoIMrsJoerZ+w997EogCnBdOOD93cPFbanNdXKeWo41MsZkw/vID64cuEiPuJOyFxneHZSkizm96flfSXRuq9PKMsoqi+EW0rIT6zM/RGH8Au7INNV0XN5Ctd4/QBZUIfx/EeK5lH7ggL71WJonP4FOcoL0kebeUrk229Fy/Afu9OStHFc9sQp6hKyK1dUrK2F3oPkUdTcLOuAGX5wYS8KEEcypbATvyhLInAMAEnj5LMe2tS0bnoZe7ww2ZAFy8TB7SDxGvv0/oWZ7D+9I3qLUEpN4kLBWEWAuDXnuvstrt4kkpdn4GJK/FLJm8R63XTop3sr0wwqkQ9pQ== "Simetría dinámica: a)cuerpo asimétrico con simetría dinámica; b)simetría de los puntos de rotación [27].")
Simetría dinámica: a)cuerpo asimétrico con simetría dinámica; b)simetría de los puntos de rotación [27].
Así, se han detectado 2 causas principales que generan la asimetría: a)asimetría de base, y b)asimetría de frontera. La asimetría de base es aquella donde los puntos de rotación del bloque no son simétricos con respecto al centroide del elemento. Esta asimetría se puede deber a la geometría del cuerpo, al material del cual está constituido (no homogéneo) o por daño del elemento, debido fundamentalmente al impacto. Las condiciones de frontera pueden dar una asimetría cuando se tiene más de 2 puntos de rotación o apoyos. Como ejemplo, podemos mencionar un cuerpo rígido libremente apoyado sobre una superficie plana y al mismo tiempo con una restricción en la parte superior, que le restringiría el movimiento en una dirección. Este sería el caso típico de un muro de mampostería que se encuentra desligado del resto de la estructura.
A pesar de los avances significativos de las investigaciones pasadas, el estudio del comportamiento asimétrico continúa siendo un campo poco estudiado. De hecho, los modelos analíticos para el estudio del balanceo de cuerpos rígidos continúan basándose en la formulación introducida por Housner [12]. La ecuación diferencial que gobierna el movimiento de balanceo es:
donde el símbolo (¿) significa diferenciación con respecto al tiempo t, θ es el ángulo de balanceo, a es la aceleración horizontal del suelo, g es la aceleración de la gravedad, el signo± se refiere al dominio del ángulo de balanceo θ>0 y θ<0, respectivamente, mientras que α es el ángulo crítico y p es un parámetro geométrico (fig. 3).

El ángulo crítico α se define como el ángulo al cual se voltea el bloque debido a cargas estáticas, y se puede calcular mediante:
mientras que el parámetro p, que tiene unidades de frecuencia, se puede definir como:donde M es la masa, I es el momento de inercia definido con respecto al punto de rotación 0 y R es la distancia del centro de gravedad al punto de rotación 0, definido mediante (fig. 3):


La disipación de energía debida al impacto del bloque se toma en cuenta mediante el coeficiente de restitución μ, el cual multiplica a la velocidad angular θ¿ cuando el cuerpo pasa a través del punto de equilibrio θ=0. Considerando que existe conservación del momento angular durante el impacto, el coeficiente de restitución se puede obtener mediante [14]:
donde θ¿b y θ¿a son las velocidades angulares en el momento justo antes y después del impacto, respectivamente.
El movimiento del balanceo se puede modelar sencillamente mediante la ecuación (1), para lo que simplemente se necesitan los parámetros α, p y μ. Estos se pueden obtener de la geometría del bloque (2-5). Sin embargo, cuando se tiene un balanceo asimétrico, aumenta considerablemente la complejidad de la formulación matemática [15,16].
3Modelo simplificado de Elementos Rígidos y ResortesEl modelo aquí propuesto se basa en el Modelo de Elementos Rígidos propuesto por Casolo y Peña [28]. Sin embargo, la diferencia principal entre ambos modelos es la forma como se consideran los resortes que conectan los distintos elementos. El MERR considera que los resortes representan las características mecánicas de las juntas y por lo tanto el elemento es completamente rígido. Por su parte, el Modelo de Elementos Rígidos propuesto en [28] considera que los resortes representan las características mecánicas del material, con lo que los esfuerzos y las deformaciones en cada resorte representan los esfuerzos y las deformaciones promedio que se presentan al interno de cada elemento, de acuerdo con un volumen tributario. Sin embargo, la cinemática y la formulación matemática de ambos modelos son similares.
Por otro lado, la ventaja que presenta el MERR con respecto al Método de los Elementos Discretos es que el primero es un modelo semidiscreto. Esto significa que el MERR puede detectar separación (salto) y deslizamiento entre puntos de apoyo. Sin embargo, para reducir el tiempo de cómputo los contactos iniciales no cambian, teniendo una continuidad relativa entre elementos. De hecho, los programas computaciones basados en técnicas de análisis discretas deben incluir rutinas que identifiquen los cambios de contacto entre elementos durante el análisis, sin necesidad de la intervención de un usuario. En teoría, la detección de nuevos contactos requiere de un simple cálculo geométrico, pero esta detección requiere de un gran tiempo de cómputo [1].
De este modo, el modelo es capaz de reproducir los 6 estados de movimiento de un cuerpo rígido [14]: a)reposo; b)deslizamiento; c)rotación o balanceo; d)rotación con deslizamiento; e)traslación con salto, y f)rotación con salto. Así, la ventaja que presenta el MERR con respecto a la formulación clásica (1) es que esta última solo puede reproducir 2 estados: reposo y balanceo.
Es importante señalar que el MERR se basa en la hipótesis de pequeñas rotaciones, lo que hace que el modelo solo se pueda utilizar para el estudio de cuerpos rígidos esbeltos. Un cuerpo rígido esbelto se puede considerar como aquel cuyo ángulo de esbeltez α es menor de 20° o cuya relación de esbeltez h/b es mayor de 2,75. La ventaja de trabajar con pequeñas rotaciones es que el seno de los ángulos se puede aproximar al valor del ángulo en radianes, lo que ayuda a simplificar la formulación matemática.
3.1FormulaciónEl cuerpo rígido se considera como un sólido plano de 2 dimensiones de n lados. Se define un sistema de coordenadas globales y un sistema de coordenadas locales (estas últimas se definen en el centroide del elemento). La configuración deformada del modelo se describe mediante la variación de la posición de las coordenadas locales con respecto a las globales. Las traslaciones u, v y el ángulo de rotación ψ, asociados con el centroide del elemento, se recogen en un vector de coordenadas lagrangianas {u}. Las cargas se condensan en 3 resultantes: las fuerzas fx y fy aplicadas en el centroide del elemento y un momento Θ (fig. 4a). Las cargas se ensamblan en un vector de fuerzas externas {fe}.
sistema de referencia; b)resortes y amortiguadores.")
Cada elemento posee r interfaces, las cuales corresponden a los lados en los que se apoya el elemento. Cada interfaz se define mediante 3 resortes lineales y 3 amortiguadores (fig. 4b). Se definen 2 resortes axiales (KiRP) localizados en las esquinas de las interfaces (RPi) y un resorte de cortante (Kicm) localizado en el centro de la interfaz (cm). Por cada resorte se define un amortiguador viscoso (Ci). La disipación de energía debida al impacto se puede tomar en cuenta con amortiguadores viscosos Ci, si estos son únicamente dependientes de la rigidez mediante la formulación clásica de Rayleigh: CiRP=βiRPKiRP, donde βiRP es la constante de amortiguamiento proporcional a la rigidez.
De este modo, la ecuación de equilibrio dinámico del sistema es [28]:
donde [M] es la matriz de masas, [C] es la matriz de amortiguamiento viscoso y {fs} es el vector de fuerzas generalizadas.
Gracias a la hipótesis de pequeñas rotaciones, la relación deformación-desplazamiento se puede expresar mediante una matriz [B] de 3r×3:
donde {δ} es el vector de deformación de los resortes y [B] es la matriz de deformación-desplazamiento. De este modo, el vector de fuerzas generalizadas se puede definir mediante:donde {Fs} es el vector de fuerzas de cada uno de los resortes, que se obtienen mediante las leyes constitutivas que definen a las interfaces (véase la siguiente subsección). Del mismo modo, la matriz de amortiguamiento viscoso se obtiene mediante:donde [A] es la matriz de amortiguamiento viscoso obtenida del ensamble de cada uno de los amortiguadores viscosos discretos.3.2Características mecánicas de las interfaces


Las características mecánicas de las interfaces se consideraron como juntas secas. Así, los resortes axiales son elásticos lineales en compresión y no resistentes a tensión. El resorte de cortante se definió como elástico-lineal-perfectamente plástico con un comportamiento tipo Coulomb (fig. 5), donde la rigidez a cortante es igual a la rigidez axial, la cohesión es igual a cero y el ángulo de fricción interna es igual a 30° [25]. De este modo, solo es necesario definir 2 constantes: a)la rigidez axial KiRP, y b)la constante de amortiguamiento viscoso proporcional a la rigidez βiRP.
axial; b)cortante.")
Estas constantes se pueden asignar directamente o se pueden obtener mediante la geometría del bloque, de acuerdo con la metodología propuesta en [25], mediante:
4Validación del modelo propuesto

La validación del modelo propuesto se realizó modelando las pruebas experimentales realizadas en cuerpos rígidos en la mesa sísmica del Laboratorio Nacional de Ingeniería Civil (LNEC) de Portugal [25,26]. Estas pruebas se realizaron en bloques de piedra de granito azul sometidos a diferentes tipos de aceleración en la base. Los detalles de las pruebas experimentales se pueden consultar en [26].
La figura 6 muestra la respuesta típica de un bloque rígido (fig. 6a) sometido a diferentes tipos de movimiento en la base (balanceo libre, movimiento armónico y aleatorio). La rigidez axial es igual a 6.471N/m, mientras que la constante de amortiguamiento proporcional a la rigidez es igual a 0,0212 [25].
geometría del bloque; b)balanceo libre; c)movimiento armónico (seno con una frecuencia de 4Hz y 4mm de amplitud); d)movimiento aleatorio.")
El modelo propuesto reproduce satisfactoriamente los 3 tipos de movimiento, tanto el balanceo libre (fig. 6b) como el movimiento de la base ante una carga sinusoidal (movimiento armónico, fig. 6c). En esta última prueba, el modelo logra reproducir satisfactoriamente los 3 estados del movimiento armónico (transitorio, estacionario y vibración libre).
Finalmente, la figura 6d muestra la respuesta del bloque ante un movimiento aleatorio de la base (sismo). Si bien la respuesta numérica no tiene el mismo grado de exactitud que la obtenida con las 2 pruebas anteriores, se puede considerar que el modelo numérico representa satisfactoriamente la prueba experimental. Esto se debe a la naturaleza misma del fenómeno del balanceo de un cuerpo rígido ante una solicitación aleatoria, la cual es de tipo cuasicaótico, por lo que no existe repetibilidad del fenómeno [25,26].
Por otro lado, la figura 7 presenta un ejemplo típico de caída libre de un bloque. Este ejemplo se realizó con el fin de mostrar la capacidad del modelo de poder tomar en cuenta la separación total del bloque con respecto a su base (salto), el cual es un estado típico del movimiento de cuerpos rígidos [14].
representación esquemática de la prueba a diferentes tiempos; b)desplazamientos verticales y fuerzas axiales en los resortes.")
El bloque de la figura 6a se separó de su base 34mm y se dejó caer libremente, como se muestra esquemáticamente en la figura 7a, que muestra el desplazamiento vertical del bloque y la fuerza axial en los resortes. Como se puede observar, cuando el bloque se encuentra separado de su base, las fuerzas en los resortes son cero. En el momento en que el bloque entra en contacto con la base aparecen fuerzas axiales en los resortes. Estas fuerzas impulsivas son las causantes de que el bloque «rebote» hasta que la energía es disipada por los amortiguadores. Cuando el bloque llega al reposo, los resortes axiales permanecen en compresión debido al peso propio del bloque.
Estos resultados muestran que la hipótesis de pequeñas rotaciones es válida para el estudio del balanceo de cuerpos rígidos esbeltos.
5Ejemplos de cuerpos rígidos con balanceo asimétrico5.1Cuerpo rígido con asimetría de baseSe presenta la simulación numérica de un bloque rectangular que presenta daño en la base. La figura 8 muestra esquemáticamente la geometría del bloque sin y con daño, así como los parámetros usados en el modelo numérico. La figura 9 muestra la prueba de oscilación libre del bloque dañado obtenido experimentalmente [26]. Las propiedades del bloque dañado se obtuvieron mediante la calibración del modelo numérico con la prueba de balanceo libre, mientras que las propiedades del bloque sin daño se consideran igual a las de la parte no dañada (lado derecho del bloque dañado).
bloque sin daño; b)bloque con daño.")

El bloque sin daño presenta un movimiento típico de balanceo libre, donde la amplitud del ángulo de oscilación disminuye constantemente en ambas direcciones. En este caso, el ángulo de oscilación inicial es de 4° y el ángulo de balanceo después del primer impacto es de 3,9°. Por otro lado, la simulación numérica del bloque dañado representa correctamente la prueba experimental. Para este caso, el ángulo de balanceo después del primer impacto es de 4,75°, casi un grado mayor que el ángulo de balanceo inicial. Esto es debido al daño del bloque en la base, lo que provoca que la respuesta no sea simétrica.
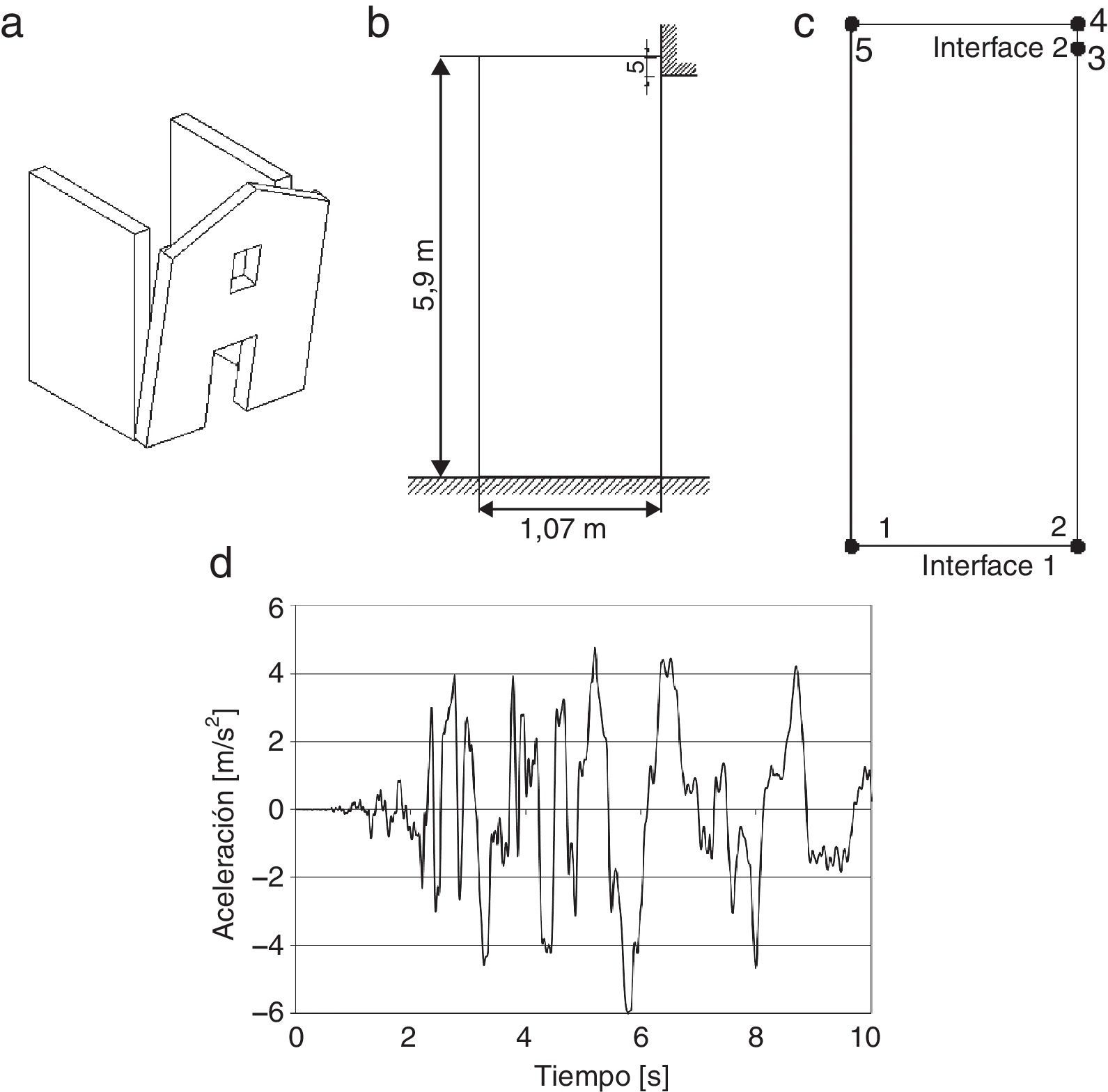
5.2Cuerpo rígido con asimetría de fronteraComo ejemplo de aplicación se presenta el balanceo asimétrico de un cuerpo rígido debido a una asimetría de frontera. Este bloque está libremente apoyado sobre una superficie plana y al mismo tiempo tiene una restricción en la parte superior, la cual le restringe el movimiento en una dirección (fig. 10a,b). En este caso se consideraron 2 interfaces (fig. 10c). Las propiedades mecánicas se obtuvieron de la geometría del bloque mediante (10-11). La primer interfaz corresponde a la base del bloque, formada por los nodos 1-2 (Ki=22.873N/m; βi=0,000926). La segunda interfaz define la restricción de la parte superior y fue modelada con los nodos 3-4 (Ki=22.873N/m; βi=0,00152). El movimiento de la base corresponde al registro de un sismo real (fig. 10d).
muro de mampostería separada del resto de la estructura; b)dimensiones; c)modelo e interfaces; d)registro sísmico.")
La figura 11 muestra el ángulo de balanceo del bloque cuando la aceleración de la base se aplica inicialmente hacia la izquierda o hacia la derecha del bloque. Únicamente se obtienen ángulos de rotación positivos debido a la restricción de la parte superior. La respuesta del bloque dependerá de la dirección de la aceleración. En este ejemplo, el ángulo máximo es de 8 y de 6 grados, cuando la aceleración se aplica inicialmente a la derecha y a la izquierda, respectivamente. Cabe señalar que se presenta un pequeño deslizamiento del bloque cuando la aceleración se aplica inicialmente a la derecha. Este desplazamiento, debido al deslizamiento, es de 20mm y ocurre en 6,85s.
6Comentarios finales
Se propuso un Modelo simplificado de Elementos Rígidos y Resortes para el estudio del balanceo asimétrico de cuerpos rígidos. Este método se basa en una modificación realizada al Método de los Elementos Rígidos. La formulación matemática propuesta es sencilla y permite modelar la dinámica de cuerpos rígidos tomando en cuenta el balanceo, el deslizamiento y el salto de los elementos. De este modo, se evita la complejidad matemática de la formulación clásica.
El método se basa en la ecuación de equilibrio dinámico para cuerpos flexibles, considerando que el bloque rígido se apoya en resortes axiales y de cortante. El amortiguamiento por impacto se simplifica al considerarlo de tipo Raleigh proporcional a la rigidez. Esto permite tener una sola ecuación, bien conocida y de fácil solución numérica, que permite representar el movimiento de cuerpos rígidos.
Para simplificar la formulación se consideran pequeñas rotaciones, es decir, rotaciones menores a 20°. De esta forma, la formulación propuesta es adecuada para los cuerpos rígidos esbeltos cuyo ángulo de esbeltez sea menor a 20°, puesto que para este tipo de elementos es cuando se sobrepasa el ángulo de esbeltez o crítico cuando se alcanza el colapso del bloque. Para el caso de elementos no esbeltos, la formulación puede usarse siempre que las rotaciones no pasen de 20°, pues la hipótesis de pequeñas rotaciones dejará de ser válida.
Los resultados numéricos muestran que la hipótesis de pequeñas rotaciones es válida cuando se estudian cuerpos esbeltos. Asimismo, el modelo aquí propuesto reproduce satisfactoriamente el comportamiento dinámico de cuerpos rígidos, que puede detectar el posible deslizamiento y salto de los elementos.
En el estudio del movimiento de un bloque rígido, su asimetría está relacionada con la simetría de los puntos de rotación del bloque con respecto a su centro de gravedad y no a su geometría. Se detectaron 2 tipos de asimetría: la asimetría de base, que está relacionada con el material, el daño y la geometría del bloque, y la asimetría debida a las condiciones de frontera.
Cuando se estudia el balanceo asimétrico, la respuesta máxima del cuerpo rígido va en función de la dirección de la carga, lo cual no ocurre cuando se trabaja con el balanceo simétrico. Por lo tanto, la dirección de la carga debe ser una nueva variable en el estudio del balanceo asimétrico de cuerpos rígidos.
El autor agradece el apoyo financiero recibido por parte del Programa de Apoyo a Proyectos de Investigación e Innovación Tecnológica (PAPIIT) de la Dirección General de Asuntos del Personal Académico (DGAPA) de la Universidad Nacional Autónoma de México (UNAM), mediante el proyecto PAPIIT IN105409 «Estrategias para el modelado y análisis de estructuras históricas». Las pruebas experimentales usadas en la validación del modelo aquí propuesto fueron realizadas dentro del proyecto ECOLEADER Group 4.