








Introducción
La evolución de la cirugía miniinvasiva en la última década ha revolucionado el mundo de la cirugía moderna. La cirugía robótica o cirugía asistida por ordenador se ha convertido en el paradigma de nuestra era. Tanto así que Satava1 se refiere a la cirugía laparoscópica como una tecnología en proceso de transición hacia la cirugía robótica. A pesar de que la cirugía robótica se encuentra en una etapa temprana, numerosos miembros de la comunidad quirúrgica de especialidades tales como cirugía general, urología, neurocirugía, cirugía torácica y cardiovascular, ginecología y cirugía vascular periférica han implementado en su práctica diaria esta tecnología emergente. La escala de procedimientos oscila desde una simple colecistectomía hasta el más complejo remplazo de válvula mitral. Este cambio de conducta entre los cirujanos se debe probablemente a las ventajas de la cirugía robótica, ya que elimina algunas de las carencias de la cirugía laparoscópica y además de un sistema óptico mejorado ofrece una serie de instrumentos específicos capaces de aumentar el grado de precisión intraoperatorio.
En julio de 2000 el Da Vinci® Surgical System fue el primer sistema robótico aprobado por la FDA para la cirugía laparoscópica general. El sistema Da Vinci® consiste de una consola a distancia, en la que se posiciona el cirujano, compuesta de un sistema óptico tridimensional y 2 controles manuales para la manipulación de los instrumentos. Cuenta además con 4 brazos articulables, de los que uno sostiene la cámara y los 3 restantes se utilizan para posicionar y maniobrar los instrumentos quirúrgicos específicos del sistema. La tecnología robótica digitaliza los movimientos de la mano del cirujano en la consola, permitiendo así la filtración del temblor y, debido a la muñeca incorporada en el extremo de cada uno de los instrumentos, la reproducción en el campo operatorio en tiempo real de los 7o de movilidad de la muñeca humana.
En la Universidad de Illinois, en Chicago, el Da Vinci® Surgical System se adoptó poco después de su aprobación por la FDA en el año 2000. Desde entonces hemos realizado más de 400 procedimientos asistidos por robot (tabla 1). En nuestra opinión, las contribuciones más notables de la cirugía asistida por robot se reflejan en su habilidad de ampliar los beneficios ya establecidos de la cirugía miniinvasiva. Este trabajo tiene por objeto analizar las aplicaciones clínicas actuales de la cirugía robótica.
Colecistectomía
Desde que Himpens y colaboradores realizaron en 1997 la primera colecistectomía robótica en Bélgica2, diversos autores han aportado su experiencia en la literatura médica3,4. Estos autores afirmaron que la colecistectomía robótica no ofrecía ninguna ventaja significativa frente a la cirugía laparoscópica convencional. Esta conclusión fue avalada por varios principios esenciales, como por ejemplo: necesidad de personal especialmente entrenado para un procedimiento de baja complejidad e incremento de los costes debido a instrumental más complejo y a un mayor tiempo operatorio. Además agregaron que, con el robot montado, la colangiografía intraoperatoria era extremadamente dificultosa de realizar.
Actualmente, no hay estudios en la literatura médica con una muestra suficientemente amplia como para demostrar una disminución en la incidencia de la principal complicación de la colecistectomía: lesión de la vía biliar.
Como conclusión, postulamos que la tecnología robótica es potencialmente ventajosa en procedimientos avanzados tales como la reparación de una lesión quirúrgica de vía biliar. La evidencia actual no sustenta la aplicación de esta tecnología de rutina en la colecistectomía laparoscópica.
Cirugía bariátrica
El tratamiento quirúrgico de la obesidad mórbida es actualmente reconocido como la terapéutica más efectiva a largo plazo. Las técnicas mínimamente invasivas se están convirtiendo en el "patrón de oro" para el tratamiento de la enfermedad, y la cirugía robótica tiene el potencial de perfeccionar estas técnicas. A pesar de esto, una encuesta realizada en 2003 mostró que en Estados Unidos sólo 11 cirujanos usaban el sistema robótico para la cirugía bariátrica5. Esto probablemente se debe al escaso número de cirugías laparoscópicas que se realizan en este país (10%) y a que pocas instituciones cuentan con tecnología robótica. Sin embargo, la cirugía robótica está ganando adeptos en la comunidad quirúrgica. Esto es probable que se deba a que la cirugía bariátrica es "técnicamente demandante", y la cirugía robótica le permite al cirujano realizar procedimientos bariátricos complejos sin modificar las técnicas utilizadas en cirugía abierta o laparoscópica con una curva de aprendizaje más corta.
Cadiere et al6 describieron por primera vez en 1999 la colocación de la primera banda gástrica ajustable asistida por robot. Asimismo, en septiembre de 2000, nuestro grupo reportó la primera serie de pacientes tratados mediante un bypass gástrico asistido por robot7.
Bypass gástrico laparoscópico
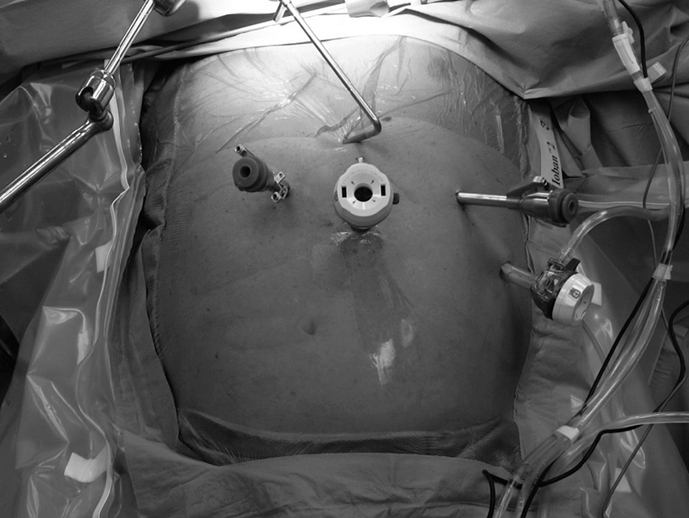
El bypass gástrico es probablemente la cirugía bariátrica que más se beneficia de la asistencia del robot. Actualmente, en la Universidad de Illinois empleamos el robot para completar el bypass gástrico laparoscópico, lo que implica que la primera parte de la cirugía se realiza por vía laparoscópica, lo que incluye la creación de un asa eferente de 120 cm, la yeyunoyeyunostomía laterolateral y la formación de un reservorio gástrico pequeño. A continuación se colocan los brazos del robot en la posición que indican las figuras 1 y 2 y se practica una gastroyeyunoanastomosis manual antecólica en 2 capas. Pensamos que usar el sistema robótico en esta etapa de la cirugía es la mejor manera de disminuir el riesgo de estenosis y fuga de la gastroyeyunoanastomosis. Recientemente, analizamos los datos de uno de nuestros expertos bariátrico y de un cirujano de otra institución. Ambos se encontraban en su curva de aprendizaje. En los casi 110 procedimientos que llevaron a cabo, no se detectó fuga de la gastroyeyunoanastomosis y la incidencia de estenosis fue menor del 9-14% señalado para la anastomosis con sutura mecánica circular8,9. Otra de las ventajas de realizar una anastomosis manual es que elimina la necesidad de pasar el yunque de la sutura mecánica circular por el esófago, disminuyendo así el riesgo de perforación esofágica o, en el caso de pasar yunque transgástrico, evita la necesidad de una línea de sutura mecánica adicional.
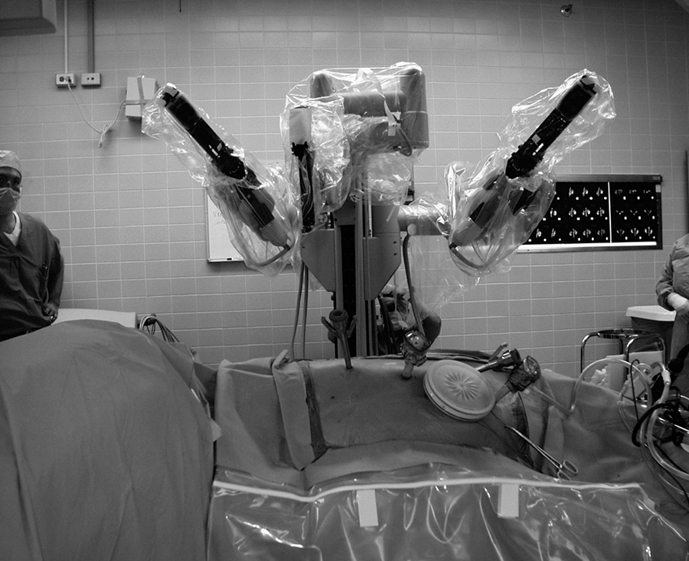
Fig. 1. Disposición del sistema robótico para cirugía esofágica y para bypass gástrico.

Fig. 2. Ubicación de los trocares para el bypass gástrico.
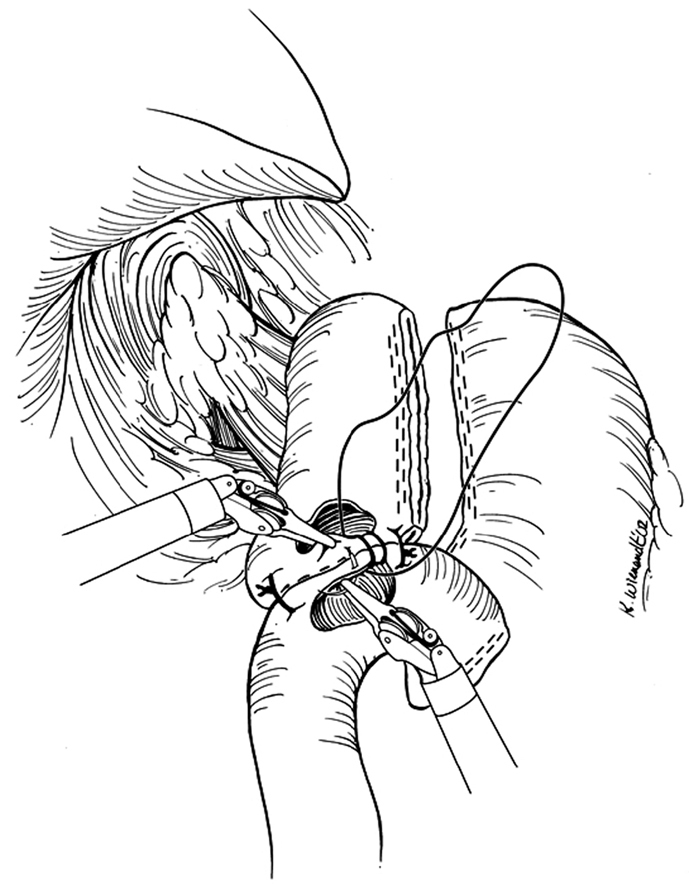
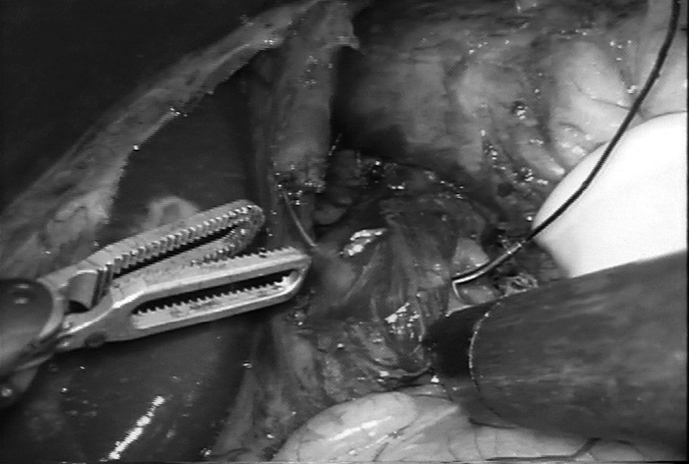
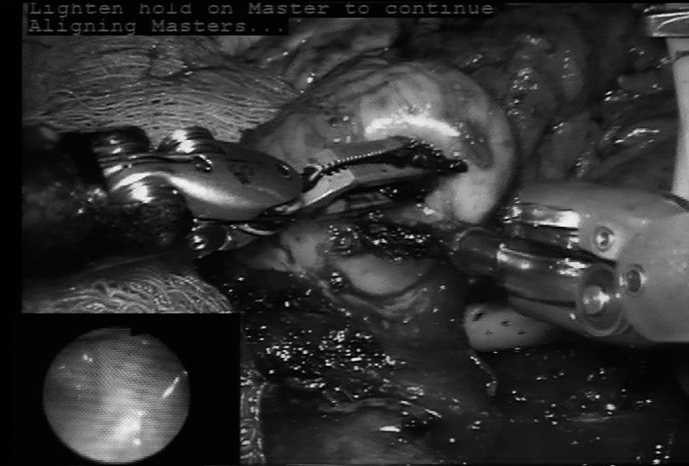
En 2003, una encuesta nacional5 llevada a cabo a cirujanos que utilizan robot realizada en Estados Unidos reveló que la principal utilidad del robot en el bypass gástrico fue la creación de la gastroyeyunostomía, ya que la muñeca articulable, la visión tridimensional y el movimiento escalante permiten una anastomosis manual más precisa (fig. 3). Esto fue más notable en pacientes con un IMC alto (> 60 o superobesos) y/o en aquellos pacientes con un lóbulo izquierdo agrandado, lo que disminuye el espacio para trabajar debajo del hígado. Respecto al tiempo operatorio, los cirujanos con una experiencia de 20 casos señalaron que el tiempo de preparación del robot puede disminuirse a 6 minutos, y que el tiempo de trabajo con el robot también puede disminuirse un 50%5.
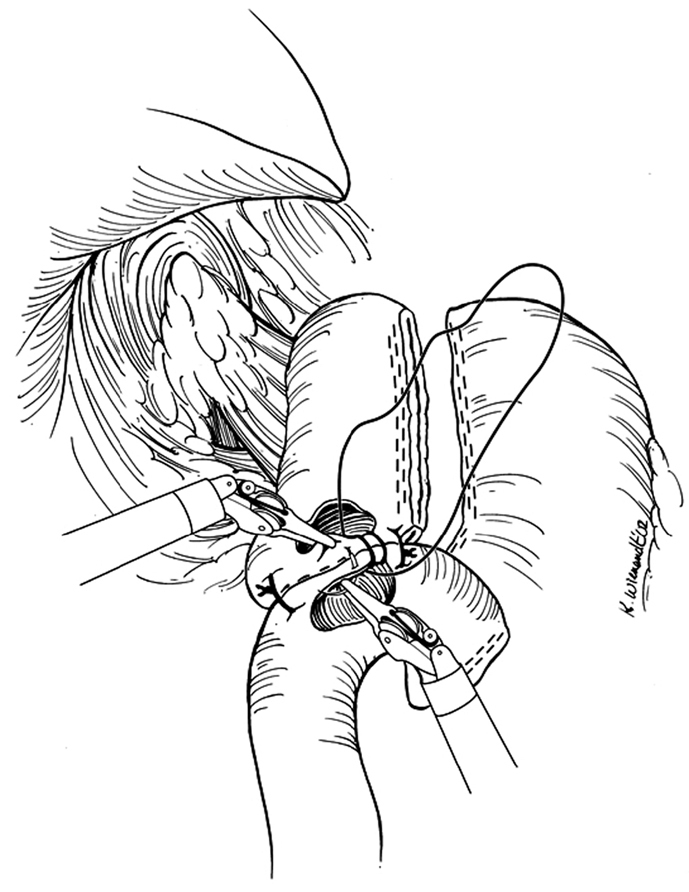
Fig. 3. Gastroyeyunostomía para el bypass gástrico.
Nuestra experiencia institucional, y la de todos los cirujanos que respondieron a nuestra encuesta, indica que la gastroyeyunostomía manual asistida por robot es superior a cualquier otra técnica de anastomosis actualmente disponible, ya que tiene el potencial de disminuir la incidencia de fuga de la anastomosis, la estenosis y la mortalidad5. Sin embargo, se necesitan estudios prospectivos aleatorizados que comparen las diferentes técnicas anastomóticas para comprobar objetivamente la efectividad del método.
Banda gástrica ajustable
La banda gástrica ajustable es un procedimiento muy popular en el resto del mundo. En Estados Unidos ha aumentado su práctica desde 2001, año de su aprobación por la FDA. Este es uno de los motivos por los que la colocación de banda asistida por robot se practica en pocas instituciones. En una encuesta efectuada en 20035, solamente 3 de los 11 centros robóticos encuestados en Estados Unidos utilizaron este método. En un estudio realizado en la Universidad de Illinois, en Chicago, en el año 2001 los pacientes candidatos para la banda gástrica ajustable se dividieron al azar en cirugía robótica y cirugía laparoscópica tradicional. En dicho estudio no se encontró diferencia significativa por lo que atañe a estancia hospitalaria y pérdida de peso; sin embargo, el tiempo operatorio fue significativamente más largo en el grupo robótico. En esta limitada pero favorable experiencia fuimos capaces de identificar algunas de las ventajas de utilizar la cirugía robótica. Los beneficios fueron más notables en pacientes con IMC > 60. En este grupo de pacientes en particular, los movimientos quirúrgicos de precisión fueron más dificultosos, lo que se debió al incremento en el esfuerzo de torsión sobre los instrumentos laparoscópicos. Por otro lado, los instrumentos robóticos tienen un diámetro mayor (8 mm), además de contar con un sistema mecánico capaz de proporcionar una potencia mayor eliminando de esta manera la dificultad de manejar los instrumentos en pacientes con una pared abdominal engrosada. Del mismo modo, permite al cirujano la manipulación de los instrumentos articulados en un campo quirúrgico limitado. Debido a estas consideraciones, en la actualidad utilizamos el sistema robótico en pacientes seleccionados y con un IMC > 60.
Cirugía esofágica
La cirugía esofágica, que antiguamente se realizaba de modo casi exclusivo por vía abierta transabdominal o torácica, ha sido remplazada en nuestros días por técnicas miniinvasivas. Estos procedimientos han disminuido considerablemente el dolor postoperatorio y la estancia hospitalaria, sin comprometer la efectividad de los diferentes procedimientos, que recientemente se han visto favorecidos con la introducción de la cirugía robótica. Se ha propuesto esta nueva especialidad quirúrgica como una alternativa segura a la cirugía laparoscópica convencional.
Como regla general, para todas las cirugías esofágicas asistidas por robot que se realizan por vía abdominal el paciente se coloca en posición de semilitotomía, con el cirujano asistente a la izquierda del paciente y los brazos del robot ubicados en la cabecera de la mesa de operaciones (fig. 1). Habitualmente, se emplean 4 trocares; el primero es de 12 mm para la cámara. A continuación se colocan 2 trocares de 8 mm para los instrumentos robóticos: uno subcostal derecho y el segundo subcostal izquierdo. El trocar restante es de 12 mm y se posiciona en el flanco izquierdo hemiclavicular. Este trocar es esencial para el cirujano asistente. Para retraer el hígado ventralmente se usa el retractor de Nathanson, que se introduce en el epigastrio, exponiendo de esta manera el hiato esofágico. Las figuras 4 y 5 muestran la disposición típica de los trocares para cirugía esofágica avanzada y los brazos robóticos en posición.
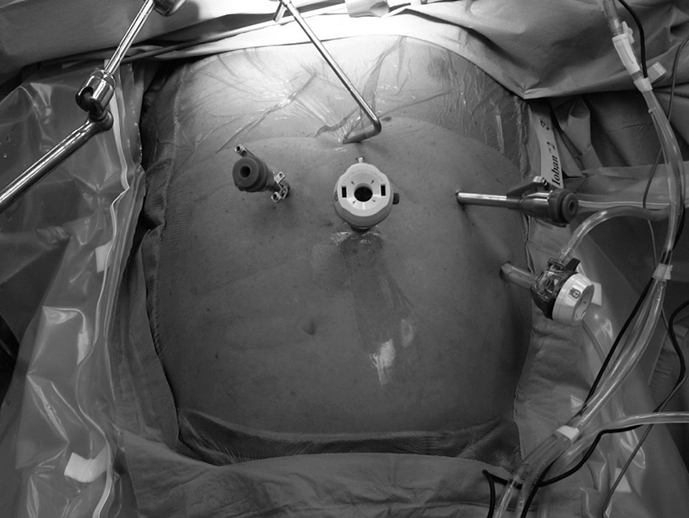
Fig. 4. Ubicación de los trocares para cirugía esofágica avanzada.

Fig. 5. Brazos del robot en posición durante cirugía esofágica.
Cirugía antirreflujo (fig. 6)
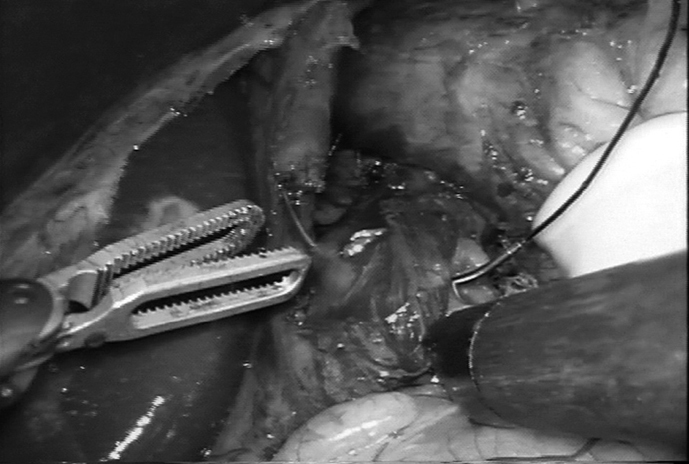
Fig. 6. Funduplicatura de Nissen asistida por robot. Cierre de los pilares diafragmáticos con puntos separados de seda 2-0.
El reflujo gastroesofágico es la enfermedad del tracto gastrointestinal superior más frecuente en el mundo occidental y además se le atribuye el 75% de las enfermedades del esófago. La forma más común de tratamiento es probablemente la medicación antisenetora. Se acepta que el tratamiento médico es exitoso en aproximadamente un 90% de pacientes. Cabe recalcar que el tratamiento debe ser crónico, ya que en la mayoría de los pacientes los síntomas recidivan una vez cesa el tratamiento. Debido a esto, en la actualidad se considera la fundoplicatura total (360o) laparoscópica como el tratamiento de elección para el reflujo gastroesofágico.
Con la llegada de la cirugía asistida por ordenador, diversos autores han tratado de asimilar la cirugía laparoscópica tradicional con la funduplicatura de Nissen asistida por robot. Melvin et al10 compararon de forma prospectiva a 40 pacientes que recibieron funduplicatura robótica y fundoplicatura laparoscópica. Estos investigadores hallaron que el procedimiento robótico fue tan seguro como el laparoscópico; sin embargo, los tiempos operatorios fueron considerablemente más largos y los costes de la cirugía fueron asimismo mayores. Respecto a la efectividad del procedimiento robótico, los autores no encontraron diferencias con la cirugía laparoscópica. De esta forma, concluyeron que el procedimiento robótico no proporcionaba un claro beneficio clínico. Otros autores11 han postulado que, en pacientes que presentan hernia paraesofágica de tamaño considerable, la asistencia del robot ofrecería la posibilidad de una mejor reparación quirúrgica desde el punto de vista técnico comparada con el tratamiento laparoscópico convencional. Sin embargo, estos datos son preliminares, ya que hoy día no hay en la literatura médica ningún estudio prospectivo aleatorizado que demuestre que el uso de la tecnología robótica reduce el elevado índice de recurrencia publicado para el tratamiento quirúrgico de la hernia paraesofágica. La experiencia en nuestra institución es similar a la indicada por los autores mencionados. No obstante, creemos que la funduplicatura de Nissen asistida por robot es potencialmente un procedimiento útil para el entrenamiento en cirugía robótica.
Miotomía de Heller
La acalasia esofágica es una enfermedad de etiología desconocida. Se caracteriza por la aperistalsis en el cuerpo esofágico y, frecuentemente, hipertensión del esfínter esofágico inferior con relajación parcial o ausente. La incidencia de acalasia es de aproximadamente 1 caso por cada 100.000 habitantes en América del Norte. El tratamiento es siempre paliativo. Las opciones de tratamiento no quirúrgico incluyen tratamiento con fármacos y tratamientos endoscópicos. Entre ellos encontramos la inyección de toxina botulínica y la dilatación neumática, que ofrecen una mejoría sintomática del 30% y del 50-75% a largo plazo, respectivamente. Consecuentemente, el tratamiento quirúrgico se ha convertido en la primera opción de tratamiento, y más aún con el advenimiento de las técnicas miniinvasivas, que se han transformado en el "patrón de oro" en el tratamiento de la acalasia esofágica. Pese a que la cirugía es efectiva, no se halla exenta de complicaciones tales como la perforación de la mucosa esofágica. Esto se debe, probablemente, a las limitaciones de la cirugía laparoscópica actual, caso de la falta de flexibilidad en los instrumentos y la imagen de vídeo de alta definición. La llegada de los sistemas robóticos ha desarrollado la cirugía esofágica avanzada. Tanto es así que, en nuestro centro, aplicamos rutinariamente esta tecnología para el tratamiento quirúrgico de la acalasia. El procedimiento consiste en extender la miotomía un mínimo de 6 cm proximal a la unión gastroesofágica y 1 o 2 cm distales. Una de las causas más frecuentes de la recurrencia de los síntomas es la extensión insuficiente de la miotomía debido a una disección proximal inadecuada del esófago. Por lo tanto, es importante la extensión de la miotomía en el mediastino posterior. Es en este espacio reducido donde la cirugía laparoscópica se hace dificultosa y habitualmente el campo visual se encuentra oscurecido por el instrumental. En contraste, los instrumentos articulables del robot permiten al cirujano operar sin restricciones en un campo quirúrgico estrecho alrededor del esófago torácico. Otra de las ventajas con las que cuenta la cirugía robótica es la disminución del índice de perforaciones de la mucosa esofágica, señalada en 5-10% de los casos independientemente de la experiencia del cirujano. Esta es una de las complicaciones más temidas al realizar una miotomía de Heller. La visión tridimensional del sistema robótico, con una magnificación de 12 veces, y la eliminación del temblor natural de la mano del cirujano permiten individualizar y dividir cada fibra muscular, efectuando así una miotomía de manera efectiva y segura (fig. 7). Una vez completada la miotomía, se practica una funduplicatura parcial anterior de Dor (180o).

Fig. 7. Miotomía de las fibras musculares esofágicas circulares utilizando el hook articulado.
En agosto de 2000 comenzamos a utilizar el Da Vinci® Surgical System en todos nuestros pacientes con acalasia esofágica. Hasta el presente, en una serie de 59 miotomías asistidas por robot no hemos tenido que convertir a cirugía laparoscópica y no hemos detectado perforaciones de la mucosa esofágica, a pesar de que casi el 50% de nuestros pacientes recibió tratamiento endoscópico previo. También podemos mencionar que a los 18 meses de seguimiento el 92% de los pacientes se encuentra asintomático. Esta no es sólo nuestra experiencia, ya que, por ejemplo, en la Ohio State University el Dr. Melvin ha tratado un número similar de casos con resultados análogos.
Divertículo epifrénico
El divertículo epifrénico es una patología poco frecuente que representa aproximadamente el 20% de los divertículos esofágicos. La patogenia de los divertículos esofágicos es controvertida, pero probablemente se relacione con dismotilidad esofágica12. Los síntomas más comunes son disfagia y regurgitación. En pacientes asintomáticos el tratamiento es conservador, de la misma manera que en pacientes sintomáticos el tratamiento es quirúrgico. Tradicionalmente, la diverticulectomía y la miotomía se realizaban por vía transtorácica. En la actualidad el mismo procedimiento se puede realizar por vía laparoscópica a través del hiato esofágico. Sin embargo, debido a los excelentes resultados obtenidos con la cirugía robótica en pacientes con acalasia esofágica, decidimos adoptar el mismo procedimiento para el tratamiento de los divertículos del esófago medio e inferior. Debido a la longitud y a la muñeca articulada de los instrumentos robóticos, este abordaje permite extender la disección en la cavidad torácica para los divertículos más proximales, así como también la manipulación del esófago sin originar excesiva tensión o esfuerzo de torsión. El sistema robótico facilita claramente la disección del cuello del divertículo comparado con la cirugía laparoscópica convencional. Además la disección laparoscópica resulta dificultosa en los divertículos de gran tamaño, lo que aumenta el riesgo de presentar complicaciones13. Durante el procedimiento, una endoscopia intraoperatoria ayuda a identificar el divertículo, además de servir como bujía durante el "disparo" de la sutura mecánica linear. Posteriormente, se lleva a cabo una miotomía contralateral al divertículo, acompañada por una funduplicatura anterior de Dor. El abordaje robótico se ha usado en nuestra institución en 6 pacientes, y los resultados obtenidos son comparables con los del abordaje laparoscópico; sin embargo, la utilización del sistema robótico ha demostrado ser más seguro al disminuir el riesgo de perforación esofágica.
Esofagectomía total
La esofagectomía total es una cirugía compleja que trae aparejada una morbimortalidad postoperatoria significativa. La adopción de técnicas mínimamente invasivas tiene por objeto disminuir tales complicaciones. Diversos autores han señalado las ventajas de utilizar técnicas laparoscópicas para la esofagectomía total14-16. No obstante, es comprometida la disección transhiatal laparoscópica del esófago torácico en las proximidades de la vena pulmonar, la aorta y la pleura parietal. Asimismo, invariablemente es necesaria la disección manual a ciegas para la movilización completa del esófago superior, lo que acarrea un mayor riesgo de hemorragia y lesión de la vía aérea. Debido a las mencionadas desventajas del abordaje laparoscópico, en 2003 comenzamos a utilizar el Da Vinci® Surgical System para el tiempo torácico de la esofagectomía transhiatal17. El procedimiento comienza con la disección laparoscópica intraabdominal, que incluye la liberación del esófago de los pilares, la sección de los vasos cortos y de la arteria gástrica izquierda. Una vez finalizado esto, el sistema robótico se coloca en posición y se inicia la disección esofágica intramediastínica. Es justamente durante esta etapa cuando los beneficios de la cirugía robótica se ven acrecentados, ya que la muñeca articulada de los instrumentos permite que el cirujano pueda realizar una precisa disección esofágica en el mediastino posterior (fig. 8). De la misma manera, a raíz de esta articulación el eje de los instrumentos no obstruye el campo visual del cirujano. Así, también, la articulación del electrocauterio de gancho evita una excesiva hemorragia y trauma de los tejidos. Adicionalmente, los instrumentos utilizados son 7,5 cm más largos que los instrumentos habituales; por consiguiente es posible una movilización mas allá del nivel de la carina y no es necesario usar cirugía toracoscópica complementaria. Para finalizar con la disección esofágica proximal, se procede a través de una incisión cervical. Una vez completada la movilización del esófago, se procede a la creación del tubo gástrico utilizando sutura mecánica linear. El esófago se extrae a través de la incisión cervical, a la vez que asciende el tubo gástrico en el lecho del mediastino. A continuación se efectúa una anastomosis cervical laterolateral. Desde que comenzamos, se han realizado 18 esofagectomías en pacientes con diagnóstico de displasia de alto grado. En esta serie de pacientes el tiempo operatorio promedio fue de 279 (175-360) minutos, incluyendo el montaje del robot, pese a que en los últimos 5 casos el promedio fue de 210 minutos. La hemorragia intraoperatoria fue de 43 (10-60) ml, combinando el abordaje robótico y el tiempo cervical. No se registraron complicaciones intraoperatorias. La estancia hospitalaria fue de 8 días como promedio, con unos límites de 6-15 días. No hubo muertes postoperatorias relacionadas con la cirugía.

Fig. 8. Disección esofágica en el mediastino posterior durante una esofagectomía total.
Creemos que la esofagectomía transhiatal asistida por robot ha demostrado ser un procedimiento seguro y efectivo para el tratamiento del cáncer de esófago precoz.
Leiomioma esofágico
El leiomioma es el más común de los tumores mesenquimáticos del esófago y representa el 80% de las lesiones esofágicas benignas. Desde el punto de vista anatómico, estos tumores se localizan en los tercios medio e inferior del esófago, y en la mayoría de los casos la lesión es única18. La mayoría de los leiomiomas se descubren de modo accidental durante la evaluación por disfagia o regurgitación. Otras formas de presentación incluyen malestar retrosternal y dolor de pecho. La indicación de tratamiento quirúrgico se realiza no sólo en pacientes sintomáticos, sino también en los asintomáticos para prevenir el crecimiento excesivo del tumor que puede complicar la resección quirúrgica futura.
Para la resección se posiciona el paciente decúbito lateral izquierdo, se colocan 5 trocares y se practica una toracoscopia asistida por robot. La disección circunferencial del esófago se ejecuta utilizando electrocauterio con gancho. Los instrumentos articulados facilitan al cirujano la colocación de un retractor retroesofágico sin producir esfuerzo de torsión, lo que favorece una disección segura, sobre todo en tumores que se encuentran en las proximidades de la vena ácigos. El aislamiento de la lesión comienza con una miotomía de la capa muscular longitudinal, y a continuación se efectúa disección roma para enuclear el tumor de la pared esofágica (fig. 9).
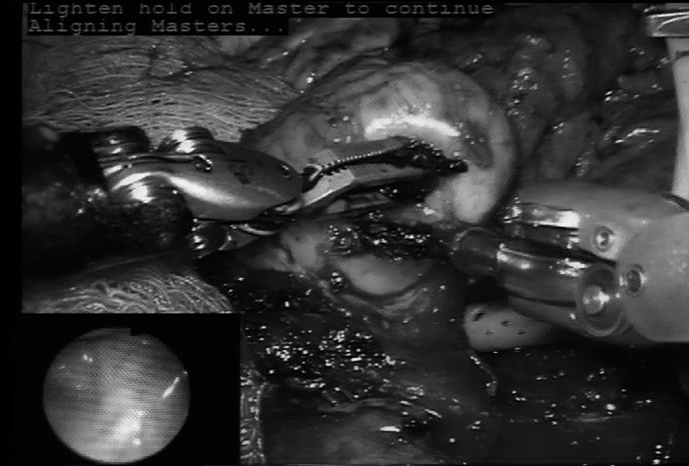
Fig. 9. Enucleación de un leiomioma asistido por robot.
Inmediatamente, se procede al cierre de la miotomía con sutura continua, aprovechando la muñeca articulada del sistema robótico. En nuestra serie de 3 pacientes, no hemos tenido lesión alguna de la mucosa, lo que atribuimos al sistema óptico mejorado de la tecnología robótica y a la disección precisa que permiten los instrumentos robóticos específicos19.
Cirugía pancreática
La aplicación de las técnicas mínimamente invasivas en cirugía pancreática se encuentra en una etapa muy temprana de su desarrollo, por lo que no resulta sorpresivo que, desde que Gagner et al20 y Susman et al21 hablaran en 1996 de la primera resección laparoscópica de un tumor endocrino de páncreas, hay sólo 2 artículos en la literatura médica que exponen la resección de tumores pancreáticos asistida por robot22,23. Giulianotti, en Italia, señala un total de 13 resecciones pancreáticas asistidas por robot. Seis de estos procedimientos se efectuaron con lo que llamaron "técnica híbrida", que consistió en resección pancreática laparoscópica convencional y reconstrucción digestiva asistida por robot. Los 7 procedimientos restantes fueron totalmente robóticos. Estos autores concluyeron que la resección pancreática asistida por robot es viable y se puede practicar de manera segura. También concluyeron que, en el futuro, es necesario contar con una mayor experiencia para evaluar las verdaderas indicaciones y la relación coste-beneficio de este abordaje.
Cirugía gástrica
En la actualidad, en Estados Unidos se ha llevado a cabo un reducido número de cirugías gástricas asistidas por robot. Entre las mismas destacan piloroplastias, resecciones de tumores gástricos y gastroyeyunostomías7,24. Sin embargo, estudios procedentes de Japón, un país con elevada incidencia de cáncer gástrico, describen buenos resultados con tratamiento mínimamente invasivo25. Hashizume et al26 describieron el uso del sistema robótico para la resección de cáncer gástrico en estadio temprano. Estos autores consideran que el uso de la tecnología robótica en este grupo de pacientes disminuiría la morbimortalidad asociada al procedimiento. No obstante, a pesar de esos prometedores resultados iniciales, es necesario contar con experiencia adicional para poder evaluar la verdadera utilidad de este procedimiento.
Cirugía colorrectal
La introducción de la cirugía laparoscópica en la cirugía colorrectal ha favorecido significativamente a esta área. Tanto es así que el abordaje robótico en el ámbito de la cirugía colorrectal es prometedor, a pesar de que la limitada experiencia actual. Hasta el momento, se han señalado en la literatura médica casos como hemicolectomía derecha, sigmoidectomía, resección anterior y resección abdominoperineal27-29. Los diferentes autores están de acuerdo en la utilidad de la cirugía robótica en los procedimientos antes mencionados. A pesar de esto, los mismos autores reconocieron que los tiempos operatorios fueron más largos y que aumentaron los costes de la cirugía30. Al igual que en otras áreas, la cirugía robótica puede facilitar potencialmente cirugías colorrectales de alta complejidad, pero se requiere contar con mayor experiencia.
Adrenalectomía
La primera experiencia en cirugía endocrina laparoscópica en la literatura médica fue la adrenalectomía publicada por Gagner et al31 en 1992. Actualmente, el abordaje mínimamente invasivo se considera de elección para el tratamiento de lesiones benignas de la glándula adrenal. En 1999, en Italia, Piazza et al32 publicaron la primera suprarrenalectomía asistida por robot utilizando el sistema robótico Zeus-Aesop. Un año después, en agosto de 2000, Kim et al emplearon el sistema robótico Da Vinci® para realizar una adrenalectomía totalmente robótica3. En 2001, realizamos en nuestro centro la primera adrenalectomía bilateral asistida por robot7. Brunaud et al33 publicaron un estudio prospectivo en el que comparaba el uso de la adrenalectomía laparoscópica convencional con el abordaje por vía robótica en 28 pacientes33. Estos autores hallaron que la técnica robótica implicaba un tiempo operatorio más dilatado (111 frente a 83 minutos; p = 0,057), que disminuyó considerablemente con la experiencia del cirujano. Al mismo tiempo, encontraron una relación directa entre el IMC del paciente y la duración de la cirugía laparoscópica. Esta relación no se observó en el grupo robótico. No señalaron diferencias en morbilidad y estancia hospitalaria entre los grupos. Si bien es claro que los beneficios de la tecnología robótica no se han demostrado para esta patología, la citada tecnología parece ser útil en pacientes con sobrepeso u obesos.
Nefrectomía de donante vivo
La nefrectomía de donante vivo representa una fuente importante de donación para pacientes con enfermedad renal terminal y ha surgido como una alternativa atractiva al donante davérico. Al mismo tiempo, en la última década la nefrectomía laparoscópica de donante vivo ha remplazado a la cirugía abierta convencional y ha ganado aceptación entre cirujanos y pacientes.
La primera nefrectomía laparoscópica de donante vivo se realizó con el objetivo de paliar la carencia de riñones disponibles para transplante y de cara a reducir la hospitalización y el tiempo de recuperación asociados a la técnica abierta34. Los resultados fueron similares a los de la cirugía abierta, agregando los beneficios reconocidos de la cirugía mínimamente invasiva35. La reducción del dolor postoperatorio, la corta hospitalización, los mejores resultados cosméticos y una convalecencia más corta han aumentado su aceptación entre los candidatos a donar, con la subsecuente expansión del pool de posibles donantes36,37. En nuestra institución, en enero de 2001 comenzamos a realizar nefrectomía laparoscópica asistida por robot utilizando el Da Vinci® Surgical System (Intuitive Surgical, Sunny valley, Ca). En nuestro caso, usamos la técnica "mano asistida" empleando el LAP DISC (Ethicon, Cincinnati, Ohio) (fig. 10). Este dispositivo permite la extracción más rápida del riñón y la disminución del tiempo de isquemia caliente38. Otras de las ventajas del abordaje "mano asistida" es el control rápido en caso de hemorragia, así como también evitar la excesiva manipulación del riñón, lo que sería necesario para la extracción del riñón en una bolsa de extracción. El sistema robótico proporciona todos los beneficios de la cirugía mínimamente invasiva, sin la necesidad de renunciar a la destreza, la precisión y los movimientos de la cirugía abierta.
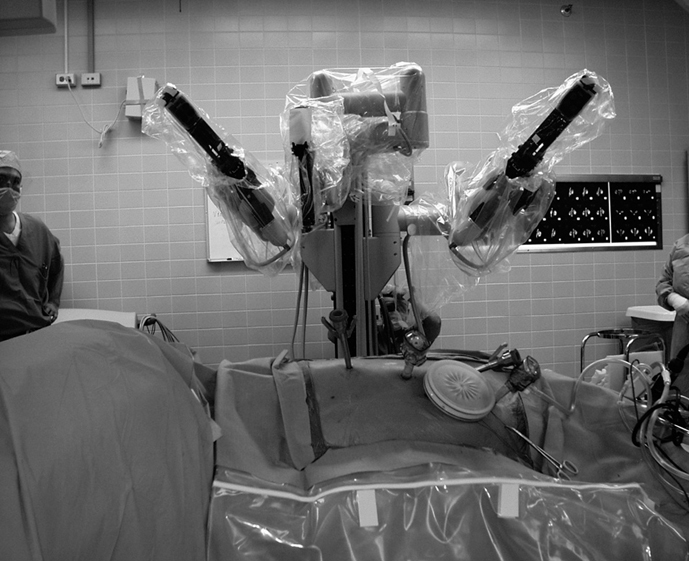
Fig. 10. Posición de los trocares y del hand-port para la nefrectomía de donante.
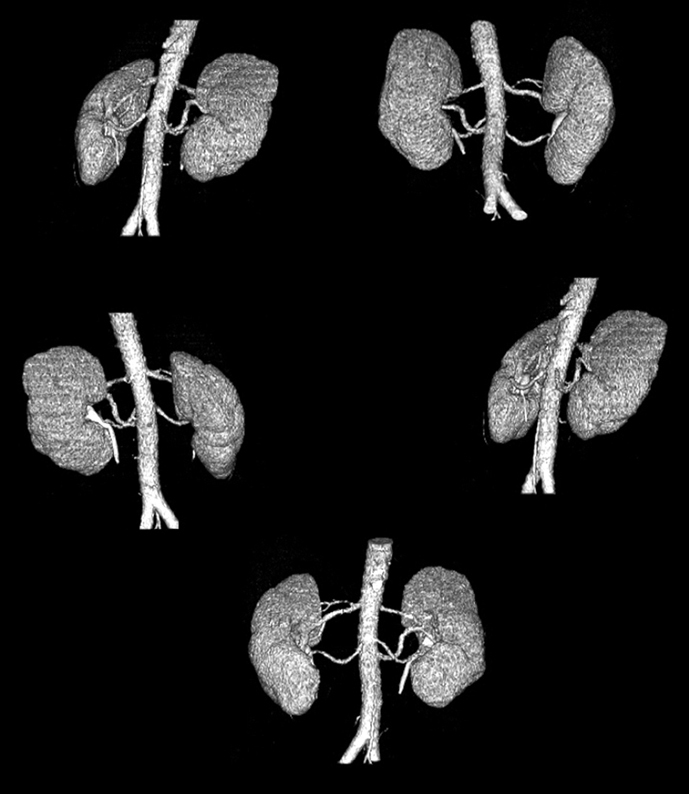
En todos los pacientes se realiza de rutina una tomografía helicoidal con reconstrucción tridimensional del riñón, para evaluar las posibles anormalidades del parénquima, del sistema colector y de la anatomía vascular renal (fig. 11). La reconstrucción permite identificar la presencia de arterias renales múltiples. Desde el comienzo de nuestra experiencia, realizamos de rutina la extracción del riñón izquierdo, sin tener en cuenta la presencia de las anomalías vasculares, para aprovechar las ventajas de una vena renal izquierda más larga. Hasta el presente, la presencia de múltiples arterias o venas renales no ha representado un problema para el abordaje asistido por robot. La disposición de la sala de operaciones es fundamental en nuestra técnica (fig. 12). Se requieren 2 cirujanos asistentes: uno de ellos coloca la mano derecha en el abdomen del paciente a través de una incisión infraumbilical de 7,5 cm y el cirujano restante asiste al cirujano en la consola por medio de un trocar de 12 mm. Con la técnica previamente descripta, se intervino a 145 pacientes. La comparación de pacientes con anatomía renal normal (72,3%) con pacientes con arterias renales múltiples (27,7%) no arrojó diferencias significativas en el tiempo operatorio, el tiempo de isquemia caliente, la pérdida sanguínea, el índice de conversión y la estancia hospitalaria. El resultado del trasplante en los receptores fue también similar en ambos grupos. Desde nuestros comienzos en el año 2001, advertimos una mejoría significativa en nuestra experiencia quirúrgica. El tiempo operatorio promedio en los primeros 50 casos fue de 206 minutos, disminuyendo a 156 en los casos restantes (p < 0,001). El tiempo de isquemia caliente fue de 87 segundos. El promedio de hemorragia fue de 50 ml y el tiempo medio de estancia hospitalaria de 2 días. Como conclusión, postulamos que la nefrectomía robótica "mano asistida" es un procedimiento seguro y efectivo que ofrece ventajas considerables a la alternativa laparoscópica.
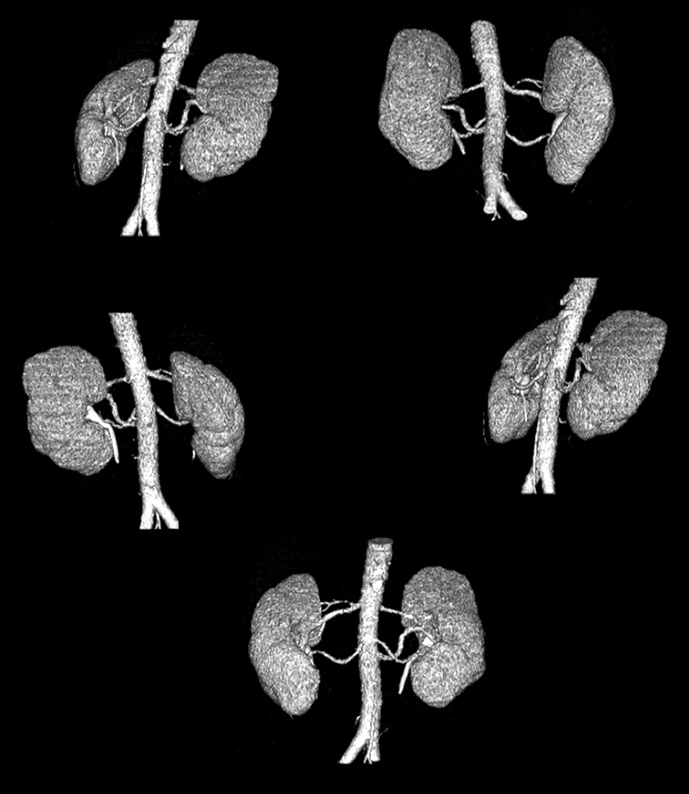
Fig. 11. Tomografía helicoidal con reconstrucción tridimensional del riñón; se realiza de rutina en todos los pacientes en el preoperatorio.
Fig. 12. Disposición del sistema robótico para nefrectomía y adrenalectomía.
Conclusión
Este artículo muestra que, a pesar de que la cirugía robótica se encuentra todavía en su inicio, la introducción de la tecnología robótica en el ámbito de la cirugía mínimamente invasiva ha producido una verdadera revolución. Como varios autores han señalado, la cirugía laparoscópica es un método transitorio. Posiblemente esta evolución se debe a que la cirugía robótica ha restablecido parcialmente algunas de las ventajas de la cirugía abierta que se perdieron desde los comienzos de la era laparoscópica. Actualmente, los beneficios de esta tecnología se ven reflejados por el incremento en sus aplicaciones de los diferentes procedimientos quirúrgicos. La velocidad de la expansión de la cirugía asistida por ordenador residirá en la mayor experiencia de los cirujanos y la introducción de nuevos avances tecnológicos. Incuestionablemente, la tecnología robótica con la que contamos hoy día es el primer paso hacia la cirugía del mañana. Por el momento, en esta era de la medicina basada en la evidencia, se necesitan nuevos estudios para demostrar las aplicaciones clínicas de los robots en cirugía.

