





La novedosa plataforma robótica da Vinci Single-Port (single port [SP]=puerto único [PU]) recibió la aprobación de la FDA en 2018. El equipo, concebido específicamente para el acceso por un solo puerto, está superando los límites de la cirugía mínimamente invasiva. Buscamos proporcionar una visión global del estado actual de las experiencias clínicas logradas por el PU da Vinci en Urología y discutir las perspectivas futuras.
MétodosSe realizó una revisión bibliográfica no sistemática centrada en artículos de cirugía urológica de puerto único utilizando los motores de búsqueda Medline/PubMed y Embase. Los autores analizaron los hallazgos y se describió un breve informe de la experiencia clínica de los procedimientos quirúrgicos llevados a cabo mediante la plataforma PU.
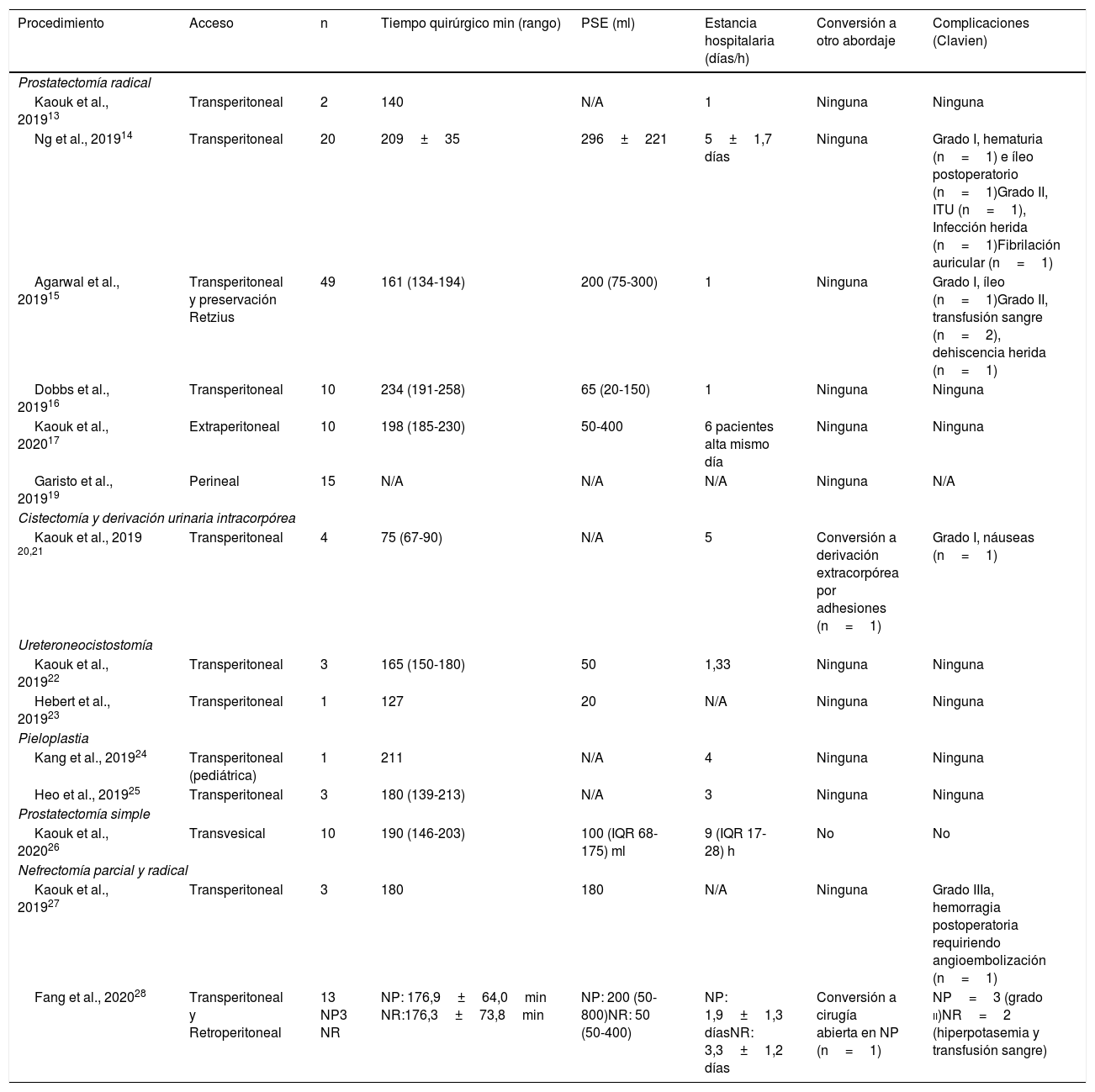
ResultadosLos datos actuales disponibles de la cirugía robótica de puerto único han establecido la seguridad y la viabilidad de los procedimientos urológicos que utilizan esta novedosa plataforma. Sin embargo, los resultados provienen de series de casos de un solo centro, cohortes pequeñas y estudios retrospectivos que deben ser interpretados con cautela. Se necesitan estudios adicionales para determinar el valor de la plataforma de PU en la comunidad urológica.
ConclusionesEl sistema robótico de PU abre nuevas fronteras en el escenario quirúrgico facilitando la realización de cirugías urológicas a través de una única incisión. Se necesitarán más estudios comparativos para evaluar los resultados oncológicos y funcionales perioperatorios y a largo plazo entre los abordajes de PU, robótico multibrazo y abierto.
The novel da Vinci Single-Port (SP) robotic platform received the US FDA approval in 2018. The device, specifically conceived for single-site approach, is pushing through the limits of minimally invasive surgery. We sought to provide a comprehensive overview of the current status of the clinical experiences accomplished by the da Vinci SP in urology, and to discuss future perspectives.
MethodsA non-systematic literature review was performed focusing on single port articles in urological surgery using Medline/PubMed and Embase search electronic engines. The authors analyzed findings and a brief report of the clinical experience for surgical procedures completed by the SP platform was described.
ResultsThe current data available from single-port robotic established the safety and feasibility of urologic procedures using this novel platform. However, the results come from single-center case series, small cohorts and retrospective studies that need to be cautiously interpreted. Additional evidence is required to determine the asset of the SP platform in the urological community.
ConclusionsThe SP robotic system opens new frontiers on the surgical scenery facilitating the completion of urological surgeries through a single incision. Further comparative studies will be required to assess perioperative and long-term oncological and functional outcomes among SP, multi-arm robotic and open approaches.



