




P-329 - EVALUACIÓN DEL DESEMPEÑO QUIRÚRGICO Y LA POSTURA ADOPTADA POR EL CIRUJANO DURANTE LA ANASTOMOSIS URETROVESICAL LAPAROSCÓPICA REALIZADA CON UN PORTAAGUJAS ROBOTIZADO
1Centro de Cirugía de Mínima Invasión Jesús Usón, Cáceres; 2Laboratorio de Biomecánica del Movimiento Humano y de Ergonomía, Universidad de Extremadura, Cáceres.
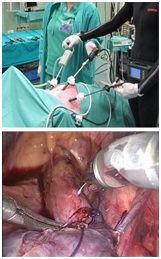
Objetivos: Evaluar el uso de un instrumental robotizado durante la anastomosis uretrovesical laparoscópica mediante el análisis del desempeño quirúrgico y la postura adoptada por el cirujano.
Métodos: En este estudio participaron seis cirujanos expertos y con experiencia previa en el uso del instrumental robotizado DEX (Dextérité Surgical). Este instrumental dispone de un mango ergonómico articulado y una punta flexible. Los participantes realizaron una anastomosis uretrovesical con puntos simples en modelo porcino haciendo uso de un portaagujas convencional (Conv) y del instrumental robotizado (Rob), organizados de forma aleatoria. Para la evaluación del desempeño quirúrgico, un cirujano experto evaluó de forma ciega cada procedimiento mediante una escala de calificación global GOALS (Global Operative Assessment of Laparoscopic Skills). Del mismo modo, cada sutura se valoró de forma individual mediante un checklist específico. La calidad final de la anastomosis se examinó mediante un test de fugas con azul de metileno. La postura adoptada por el cirujano se evaluó mediante análisis cinemático 3D. Para ello, se registraron los movimientos de los segmentos corporales de la cabeza, tórax y lumbar del cirujano mediante un sistema de sensores inerciales (Xsens, MVN Biomech). La carga de trabajo física y mental también fue evaluada mediante la encuesta NASA Task Load Index (NASA-TLX).
Resultados: Los cirujanos mostraron habilidades quirúrgicas similares con ambos instrumentos durante la ejecución del procedimiento, aunque presentaron una mayor fluidez con el instrumental convencional (p = 0,048). La calidad en la realización de las suturas intracorpóreas fue similar con ambos portaagujas, aunque el uso del dispositivo robotizado llevó a un aumento en el número de movimientos durante el manejo de la aguja y a una menor tendencia a seguir su curvatura durante la maniobra de retirada (p = 0,007). Solo una anastomosis, realizada con el portaagujas robotizado, presentó fugas durante el test con azul de metileno. El nivel de carga de trabajo aumentó con el dispositivo robotizado. Sin embargo, los cirujanos mostraron el mismo nivel de satisfacción con los resultados quirúrgicos obtenidos con ambos instrumentos. El uso del portaagujas robotizado llevó a una postura similar del hombro y la muñeca y una mejor postura del codo (p = 0,026) en comparación con el portaagujas convencional.
Conclusiones: El uso del instrumento robotizado durante la anastomosis uretrovesical obtuvo resultados similares en el desempeño quirúrgico en comparación con el uso del portaagujas convencional. Consideramos que aspectos como la destreza en el manejo de la aguja y la carga de trabajo podrían mejorarse con un periodo adecuado de formación con el nuevo dispositivo. Los cirujanos presentaron una postura corporal más adecuada con el uso del portaagujas robotizado.

