





O-012 - DESARROLLO Y SISTEMATIZACIÓN DE LA CIRUGÍA PANCREÁTICA ROBÓTICA, DEL 0 AL 85% ¿CÓMO LO HEMOS HECHO?
Hospital Universitari Arnau de Vilanova, Lleida.
Introducción: En la era de la cirugía mínimamente invasiva, parece que la cirugía pancreática, y en concreto la duodenopancreatectomía cefálica (DPC), por su complejidad se ha resistido a establecerse como la vía de elección. La cirugía robótica ha permitido superar las limitaciones de la cirugía laparoscópica del páncreas aportando ventajas en el control de disección, visión magnificada e inmersiva con grados de libertad de movimiento.
Objetivos: Presentar un modelo de curva de desarrollo y sistematización de Cirugía Pancreática Robótica basada en nuestra experiencia.
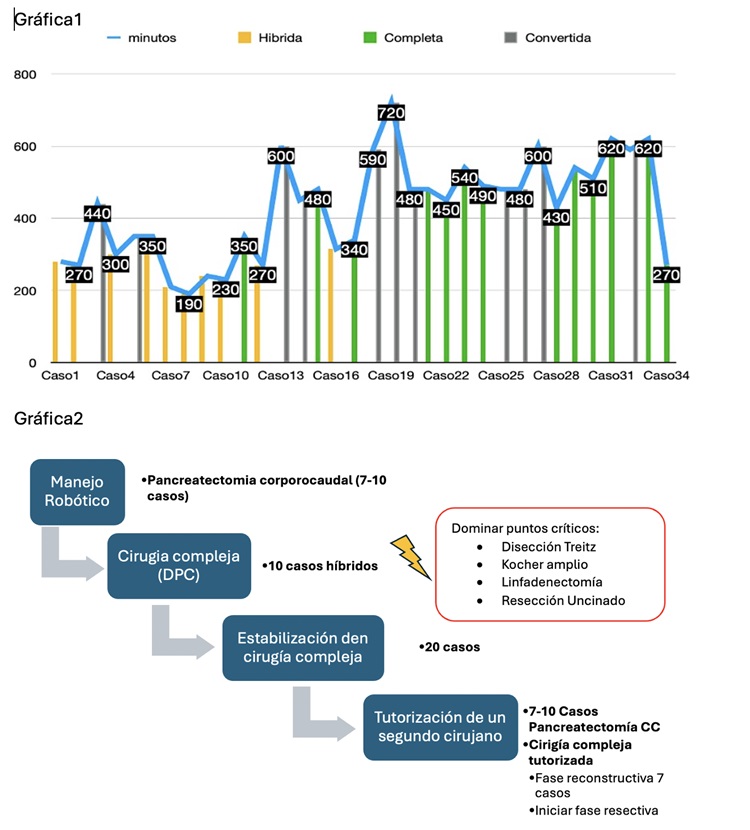
Métodos: Entre febrero 2020 y abril 2024 se han realizado un total de 67 cirugías pancreáticas robóticas: 29 pancreatectomías corporocaudales (PCC) 4 pancreatectomías totales y 34 DPC. Hemos planteado un modelo progresivo basado en dos puntos: 1. Adquisición del manejo robótico en cirugía pancreática: eligiendo como modelo la pancreatectomía corporocaudal; 2. Conseguir tiempo óptimos: sistematización de la cirugía corporocaudal y planteamiento de modelo híbrido programado (conversión programada para la reconstrucción) para el desarrollo de la curva en duodenopancreatectomía cefálica hasta conseguir realizar la fase resectiva por debajo de las 4 h. Lo desarrollamos de la siguiente manera: inicio del programa: se realizaron 10 PCC, 7 consecutivos por el mismo cirujano, con ello se adquirió el manejo robótico en cirugía pancreática, con un tiempo medio de 245 min. Evolución: inicio de la cirugía pancreática compleja: DPC de forma escalonada, realizando de entrada únicamente la parte resectiva donde definimos 4 puntos críticos de dificultad técnica y que pueden comportar complicaciones posoperatorias: Liberación de ángulo de Treitz, maniobra de Kocher, linfadenectomía y resección proceso uncinado. Analizando esta evolución (fig. 1) en las primeras 10 DPC (resección) empleábamos un tiempo de 258 minutos, con necesidad de conversión en 2 casos, a partir de la 8.ª DPC observamos una clara disminución del tiempo medio a 197,5 min, en ese punto consideramos completar casos seleccionados. Estabilidad de la curva: a partir del caso 20 vemos una estabilidad de la curva donde la mayoría de casos son completados con éxito abandonando el modelo hibrido. Formación de un segundo cirujano tutorizado con doble consola: en el momento en que el primer cirujano asume la técnica completa (caso 20), incorporamos el aprendizaje del segundo cirujano tutorizado por el primero, siguiendo el programa propuesto: pancreatectomía corporocaudal hasta adquirir el manejo robótico: 7 PCC completas. Inicio en cirugía compleja tutorizada: Inicialmente anastomosis biliar y entérica hasta conseguir desarrollar por completo la parte Reconstructiva (7 casos), de ahí se pasará a la resección.
Resultados: Propuesta de modelo de aprendizaje sistematizado (fig. 2).
|
Fase |
Procedimiento |
Nº casos |
Puntos críticos |
|
Manejo robótico |
Pancreatectomía caudal y corporocaudal |
7-10 |
Paso retropancreático |
|
Disección vascular |
|||
|
Cirugía compleja |
DPC |
10 casos híbridos |
Disección Treitz |
|
Kocher amplio |
|||
|
Linfadenectomía |
|||
|
Resección Uncinado |
|||
|
Estabilización de cirugía compleja |
DPC |
20 casos |
|
|
Tutorización de un segundo cirujano |
Inicio: P. caudal y corporocaudal |
7-10 |
|
|
Evolución DPC: |
|||
|
Reconstructiva |
|||
|
Completa |
Conclusiones: La cirugía pancreática mínimamente invasiva robótica es compleja pero factible, reproducible y segura con un programa sistematizado de forma progresiva para conseguir una estandarización del proceso completo. Además, la tutorización mediante una segunda consola acelera el proceso de formación y acorta la curva de aprendizaje.

