






El sistema Da Vinci (Intuitive Surgical®) es un telemanipulador quirúrgico que proporciona numerosas ventajas técnicas al abordaje laparoscópico convencional (visión tridimensional, posición ergonómica, precisión en los movimientos, instrumental multiarticular, etc.) y que se viene utilizando en diversas especialidades en todo el mundo desde el año 2000. El primer hospital público español que incorporó esta tecnología robótica fue el Hospital Clínico San Carlos (HCSC) de Madrid en julio de 2006.
Presentamos la organización multidisciplinaria y los resultados asistenciales, docentes e investigadores del programa de cirugía robótica (PCR) desarrollado en el HCSC.
Material y métodoCon una dirección común y un equipo común de instrumentistas, se incorporaron progresivamente al PCR los servicios de Cirugía General, Urología y Ginecología, con procedimientos variados y de complejidad creciente. Se programaron numerosas actividades docentes y de difusión tanto intrahospitalarias como extrahospitalarias para dar a conocer el PCR.
ResultadosEntre julio de 2006 y julio de 2008 se intervinieron 306 pacientes en el ámbito del PCR-HCSC: 169 en Cirugía General, 107 en Urología y 30 en Ginecología. Los resultados demostraron la factibilidad de los procedimientos y su corta curva de aprendizaje. La actividad docente realizada incluyó a residentes y especialistas interesados en la tecnología robótica.
ConclusiónLa incorporación estructurada y gradual de la cirugía robótica mediante el PCR-HCSC ha permitido facilitar el aprendizaje, compartir la infraestructura diseñada, coordinar las actividades de difusión y la colaboración multidisciplinaria. Esta experiencia inicial ha demostrado la eficacia de una organización adecuada y un equipo motivado.
Da Vinci system (Intuitive Surgical®) is a surgical telemanipulator providing many technical advantages over conventional laparoscopic approach (3-D vision, ergonomics, highly precise movements, endowrist instrumentation…) and it is currently applied to several specialties throughout the world since 2000. The first Spanish public hospital incorporating this robotic technology was Hospital Clinico San Carlos (HCSC) in Madrid, in July 2006.
We present the multidisciplinary organization and clinical, research and training outcomes of the Robotic Surgery Plan developed in the HCSC.
Material and methodsStarting from joint management and joint scrub nurses team, General and Digestive Surgery, Urology and Gynaecology Departments were progressively incorporated into the Robotic Surgery Plan, with several procedures increasing in complexity. A number of intra and extra-hospital teaching and information activities were planned to report on the Robotic Surgery Plan.
ResultsBetween July 2006 and July 2008, 306 patients were operated on: 169 by General Surgery, 107 by Urology and 30 by Gynaecology teams. The outcomes showed feasibility and a short learning curve. The educational plan included residents and staff interested in robotic technology application.
ConclusionThe structured and gradual incorporation of robotic surgery throughout the PCR-HCSC has made it easier to learn, to share designed infrastructure, to coordinate information activities and multidisciplinary collaboration. This preliminary experience has shown the efficiency of an adequate organization and motivated team.
Aunque no es un término correcto desde el punto de vista conceptual, se entiende por «cirugía robótica» la que se lleva a cabo con la asistencia de un telemanipulador. Hoy en día, el sistema de telemanipulación quirúrgica más difundido es el robot Da Vinci (Intuitive Surgical®).
Cuando se opera con este sistema, el cirujano se sitúa sentado en una consola a cierta distancia de la mesa, con una visión tridimensional y ampliada del campo quirúrgico y los movimientos que realiza en los manipuladores se transmiten con extrema precisión al campo quirúrgico a través de los brazos del robot, ensamblados a los instrumentos1.
La asistencia de la cirugía laparoscópica con el sistema Da Vinci proporciona una serie de ventajas sobre el entorno laparoscópico convencional: visión tridimensional magnificada, instrumental articulado con más grados de movimiento, estabilidad y precisión, y ergonomía sensorial, física y cognitiva para el cirujano2. Entre sus inconvenientes hay que mencionar la falta de percepción táctil en los sistemas actualmente en uso y el alto coste del equipo.
La primera intervención robótica fue una colecistectomía realizada en 1997 en Bélgica3. En el año 2000, la FDA autorizó el uso clínico del robot Da Vinci para procedimientos de cirugía digestiva. Desde entonces, la cirugía robótica se ha desarrollado con intensidad en las más diversas aplicaciones en todo el mundo4,5. La investigación en marcha tiende a resolver los problemas planteados por la clínica, y hace prever un futuro fascinante para la cirugía en un plazo no muy largo6,7.
En España, los primeros robots Da Vinci se instalaron en centros privados en Barcelona y en Bilbao y se aplicaron a procedimientos urológicos, fundamentalmente la prostatectomía radical8. El tercer centro que incorporó el robot fue el Hospital Clínico San Carlos (HCSC) en julio de 2006 y, en este caso, se diseñó un programa de cirugía robótica (PCR-HCSC) con una triple vertiente asistencial, docente e investigadora. Se integraron los servicios quirúrgicos interesados y se planificó el desarrollo de actividades de investigación y formación acordes con el carácter universitario y docente del hospital9.
En este artículo se presentan globalmente la organización multidisciplinaria y los resultados asistenciales, docentes e investigadores del PCR-HCSC.
Material y métodoAntes de la llegada del robot Da Vinci al Hospital, se realizaron numerosas actividades organizativas y se llevó a cabo una intensa formación en centros extranjeros con experiencia, para afrontar el inicio de la cirugía robótica en las mejores condiciones posibles9.
Como se ha mencionado, la organización del PCR-HCSC tuvo 3 vertientes:
Vertiente asistencialSe aplicó la cirugía robótica a pacientes en los que estaba previsto realizar procedimientos laparoscópicos. No se aplicaron criterios de selección diferentes. A todos ellos se los citó previamente en una consulta organizada al efecto para recibir la información oportuna y obtener el consiguiente documento de consentimiento (previamente diseñado junto con el Comité de Ética del hospital). Este documento era complementario de los habituales y se utilizó para todos los procedimientos de todas las especialidades.
Se programó una incorporación progresiva de las especialidades interesadas: empezó con Cirugía General, enseguida se incorporó Urología (octubre 2006) y posteriormente Ginecología (abril 2007). La actividad semanal del quirófano robótico se repartió entre los 3 servicios: 2 días Cirugía, 2 días Urología y un día Ginecología.
Los procedimientos que se programaron inicialmente por parte de Cirugía General fueron colecistectomías y cirugías antirreflujo (Nissen). Posteriormente se introdujo la cirugía de colon y algunos procedimientos de cirugía bariátrica. Por parte de Urología, se inició la experiencia con la prostatectomía radical y poco tiempo después se ampliaron las indicaciones a la cirugía del suelo pélvico y otras. La colposacropexia robótica se llevó a cabo por un equipo mixto (Urología y Cirugía). El Servicio de Ginecología inició su experiencia con la visita del Prof. Magriñá (de la Clínica Mayo, Rochester, Arizona, EE. UU.), que realizó una histerectomía en abril de 2007, e incluyó anexectomías, histerectomías y otros procedimientos avanzados.
El equipo de enfermeros instrumentistas era común a todas las especialidades y contó inicialmente con 2 personas, pero se amplió posteriormente.
Técnica del abordaje robóticoEl robot Da Vinci (Intuitive Surgical®) se compone de 3 elementos: la consola maestra, la columna de visión (con un doble sistema óptico que permite la visión tridimensional en la consola) y los brazos del robot, que transmiten los movimientos del cirujano al paciente.
Antes de iniciar la intervención, el personal sanitario auxiliar se ocupa de disponer el quirófano de la forma adecuada para el procedimiento previsto y de poner a punto el sistema. Comienza la intervención mediante el abordaje laparoscópico habitual (en nuestro caso, técnica periumbilical abierta con trocar de Hasson). Una vez colocados los trocares y posicionado el robot, comienza la intervención desde la consola, con la ayuda de un cirujano en la mesa (fig. 1).
Vertiente docente
Entre otras actividades, se desarrollaron sesiones informativas sobre la cirugía robótica para los diferentes servicios y unidades del hospital, invitando a los interesados a presenciar in situ la actividad quirúrgica. También se organizaron seminarios prácticos durante los cuales se explicó en el quirófano del robot la sistemática de funcionamiento y la preparación del equipo, y se permitió a los asistentes, en grupos reducidos, realizar ejercicios de simulación. Además, se implementaron con cirugía robótica los cursos previstos de formación continuada laparoscópica y la formación de los residentes quirúrgicos.
Vertiente investigadoraLa recogida de datos se sistematizó desde el principio, incluyendo información relacionada con el abordaje (preoperatoria, intraoperatoria y del seguimiento postoperatorio), además de la específica de cada procedimiento. El parámetro «tiempo de intervención» se dividió en 4 fases: T1: preparación del sistema (set-up); T2: abordaje y posicionamiento de los brazos del robot (docking); T3: intervención propiamente dicha, y T4: finalización del procedimiento.
Todos los datos obtenidos se analizaron utilizando el software para Windows SPSS v15.0. Se aplicó el test de la U de Mann-Whitney para comparar variables continuas, expresadas como media±desviación estándar o mediana y rango intercuartílico, mientras que las variables cualitativas se expresaron como porcentajes. Se rechazó la hipótesis nula cuando p<0,05.
El PCR establecía la difusión de los resultados iniciales obtenidos a través de la participación de sus componentes en reuniones nacionales e internacionales, y también mediante la publicación de trabajos científicos.
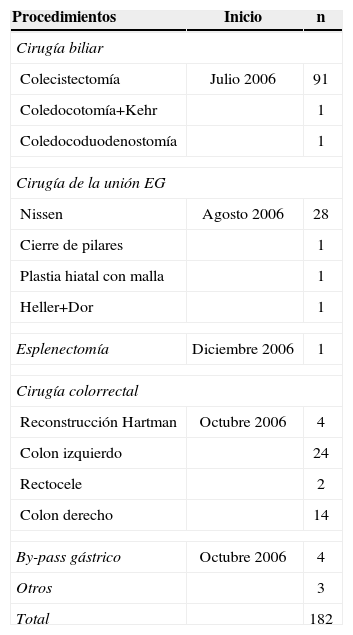
ResultadosAsistencialesLa actividad asistencial se inició el 11 de julio de 2006 con la realización de una colecistectomía laparoscópica. Desde entonces hasta el mes de julio de 2008, el equipo de Cirugía General ha llevado a cabo 182 procedimientos en 169 pacientes (tabla 1). De ellos, 118 fueron mujeres (69,4%). La edad media del grupo fue de 57,8 años (16,16). Se realizó en todos los casos la técnica laparoscópica habitual, con algunas modificaciones impuestas por el robot, como la posición de los trocares (fig. 2). Desde el principio se hizo evidente la factibilidad de los procedimientos y la ventaja técnica proporcionada por el robot en los pasos complejos de las intervenciones10–12.
Procedimientos de Cirugía General de 2006–2008
| Procedimientos | Inicio | n |
| Cirugía biliar | ||
| Colecistectomía | Julio 2006 | 91 |
| Coledocotomía+Kehr | 1 | |
| Coledocoduodenostomía | 1 | |
| Cirugía de la unión EG | ||
| Nissen | Agosto 2006 | 28 |
| Cierre de pilares | 1 | |
| Plastia hiatal con malla | 1 | |
| Heller+Dor | 1 | |
| Esplenectomía | Diciembre 2006 | 1 |
| Cirugía colorrectal | ||
| Reconstrucción Hartman | Octubre 2006 | 4 |
| Colon izquierdo | 24 | |
| Rectocele | 2 | |
| Colon derecho | 14 | |
| By-pass gástrico | Octubre 2006 | 4 |
| Otros | 3 | |
| Total | 182 | |

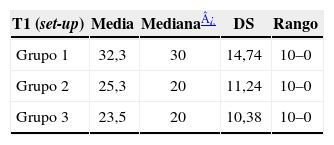
Con el fin de analizar la evolución en el aprendizaje del equipo de Cirugía General, dividimos la experiencia global en 3 grupos equitativos (grupo 1: casos 1 a 57, grupo 2: casos 58 a 114 y grupo 3: casos 115 a 169) y comparamos los resultados de las medianas de T1 y de T2 en los 3 grupos. En el caso de T1 se evidenció una disminución estadísticamente significativa del tiempo necesario para completar esta fase y para T2 esta diferencia entre los 3 grupos no alcanzó la significación estadística (tabla 2).
Resultados de T1 (set-up) y T2 (abordaje y posicionamiento del robot) a lo largo del tiempo en Cirugía General (en minutos)
| T1 (set-up) | Media | Mediana¿ | DS | Rango |
| Grupo 1 | 32,3 | 30 | 14,74 | 10–0 |
| Grupo 2 | 25,3 | 20 | 11,24 | 10–0 |
| Grupo 3 | 23,5 | 20 | 10,38 | 10–0 |
| T2 (abordaje y posicionamiento) | Media | Mediana¿¿ | DS | Rango |
| Grupo 1 | 33,2 | 30 | 16,21 | 15–80 |
| Grupo 2 | 27,7 | 25 | 10,36 | 10–50 |
| Grupo 3 | 24,8 | 20 | 11,11 | 10–75 |
DE: desviación estándar.
Ninguna de las incidencias intraoperatorias de la serie se pudo atribuir al uso del robot, salvo 2 ocasiones en que hubo dificultades para el posicionamiento de los brazos (1,2%). En ambos casos se completaron las intervenciones sin precisar conversión a laparoscopia ni a cirugía abierta. No fue así en una de las primeras colecistectomías, en que la imposibilidad de conseguir una exposición adecuada del campo obligó a completar la intervención por laparoscopia (0,6%). El resto de las conversiones fueron a cirugía abierta (16 casos [9,4%]), en su mayoría en la cirugía colorrectal y debido a la presencia de adherencias intraabdominales intensas, al hallazgo de tumores localmente avanzados o a dificultades para la localización del tumor. En 5 casos se convirtió a cirugía abierta por hemorragia (una hemorragia cística en una colecistectomía, una hemorragia esplénica en una funduplicatura y 3 casos en la cirugía de colon) (2,9%).
El equipo de Urología realizó su primera intervención, una prostatectomía radical, el 9 de octubre de 2006 y completó en el período de estudio 107 procedimientos (tabla 3), sin complicaciones intraoperatorias graves y con 3 conversiones (4,8%): una a laparoscopia y 2 a cirugía abierta8,13. La serie de colposacropexia se llevó a cabo por un equipo mixto con Cirugía General, con buenos resultados técnicos (una sola conversión a laparoscopia [2,9%]) y clínicos14.
Procedimientos de Urología y Ginecología de 2006–2008
| Procedimientos | Inicio | n |
| Prostatectomía radical | Octubre 2006 | 66 |
| Colposacropexias | Noviembre 2006 | 34 |
| Pieloplastia | Noviembre 2007 | 5 |
| Otros de Urología | 2 | |
| Total Urología | 107 | |
| Anexectomía | Mayo 2007 | 10 |
| Histerectomía | Abril 2007 | 17 |
| Histerectomía+linfadenectomía | Mayo 2008 | 3 |
| Total de Ginecología | 30 | |
El Servicio de Ginecología se incorporó al PCR en abril de 2007. En el período de estudio se completaron 30 procedimientos (tabla 3), con 2 complicaciones en la serie (6,6%), ambas resueltas mediante conversión a laparotomía.
DocentesDurante el período de estudio se realizaron 11 sesiones informativas a servicios y unidades de los hospitales interesados, y en diciembre de 2007 se organizó una sesión multidisciplinaria para dar a conocer los resultados preliminares de los 3 servicios implicados. En los seminarios prácticos participaron 30 residentes y especialistas (10 de Cirugía General, 8 de Urología y 12 de Ginecología).
Se incluyeron prácticas de cirugía robótica en los cursos de formación continuada (como el curso «La tecnología al servicio de la formación en cirugía mínimamente invasiva», en marzo de 2008) y en los cursos de entrenamiento en cirugía mínimamente invasiva de los residentes.
DiscusiónSatava consideraba la laparoscopia como una fase de transición hacia la «cirugía basada en la información»15. La cirugía robótica no sólo mejora la calidad de la cirugía, sino que la convierte en un proceso informático susceptible de implementación, tanto en su vertiente aferente (obtención de la imagen o de la información) como en su vertiente eferente (manipulación quirúrgica a través de instrumentos multiarticulados, «inteligentes» o de microinstrumentos), como afirmaba Giulianotti recientemente16. Esto hace que las ventajas conocidas de la cirugía robótica en la actualidad sólo sean «la punta del iceberg» de los cambios a los que vamos a asistir en breve plazo en la cirugía.
Nuestra experiencia es singular en varios aspectos: se trata de la introducción de la cirugía robótica en la sanidad pública española, a través de un centro con una importante vinculación universitaria y además se ha realizado al integrar en el proceso de forma gradual y coordinada a diferentes especialidades. Esto ha tenido muchas ventajas prácticas, derivadas del trabajo en equipo: el aprendizaje se simplifica a medida que progresa el PCR, la elaboración de documentación se realiza entre todos y es aplicable a todos los casos, el equipo de enfermería colabora con todos los equipos, con lo que acumula una enorme experiencia muy útil17, y se forman equipos multidisciplinarios para determinados procedimientos, lo que facilita su realización, como ha ocurrido en el caso de la colposacropexia13. El éxito de un proyecto como éste depende en gran medida de contar con un equipo de profesionales motivados e ilusionados, y también con el apoyo de la institución, sin el cual lógicamente el proyecto no es viable18.
Del mismo modo que en otras series publicadas que incluyen múltiples técnicas, en ésta, la factibilidad de los procedimientos se hizo evidente desde los primeros casos19,20. En Cirugía General, aunque se programaron inicialmente colecistectomías y cirugía de enfermedad benigna de la unión EG para iniciar el aprendizaje, en los casos complejos (vesículas esofagogástricas complicadas o grandes hernias diafragmáticas) encontramos grandes ventajas en la utilización del robot, que muy probablemente evitaron conversiones a cirugía abierta. Coincidimos con Talamini et al en sus consideraciones acerca de las sensaciones subjetivas que percibe el cirujano que opera con el robot Da Vinci: la visión es mejor, la movilidad de los instrumentos también, es más cómodo y algunos pasos de la intervención requieren más tiempo pero en otros se acorta el procedimiento (por ejemplo, se simplifica mucho la realización de suturas)20. En cuanto a la falta de percepción táctil, aunque inicialmente se manifiesta en la rotura de algún hilo de sutura e incluso alguna perforación vesicular, enseguida se ve compensada por la visión tridimensional magnificada20,21.
En ocasiones, el robot permite indicar por laparoscopia un procedimiento que de otro modo se indicaría abierto, pero también puede implicar dificultades cuando la cirugía requiere cambios de campo quirúrgico, como en la cirugía colorrectal. Es el aprendizaje y la transmisión de lo aprendido dentro del equipo lo que permite superar las dificultades. En nuestro criterio, el papel del cirujano que está en la mesa y asiste la intervención es fundamental, sobre todo en las cirugías complejas21. La utilidad del robot en un procedimiento concreto depende de su sistematización y del aprendizaje. Cada equipo debe establecer sus procedimientos de elección en función de su actividad. En la cirugía colorrectal hemos encontrado ventajas en la disección rectal y en el control de la hemorragia y la realización de suturas22, pero en ocasiones fue necesario realizar algunos pasos de la intervención por laparoscopia (técnica híbrida) por dificultades para llegar a todos los campos con el robot.
Esta experiencia animó a la ampliación de las indicaciones en todos los equipos. En Cirugía General, se mantuvieron las indicaciones reseñadas y se incluyeron la cirugía del bazo y algunas indicaciones de cirugía oncológica no colorrectal.
La cirugía robótica ya está experimentando cambios procedentes de la intensa investigación tecnológica en marcha y su versión actual probablemente habrá quedado obsoleta en muy poco tiempo. Como afirma Satava: «la ciencia no espera a nadie y debemos estar preparados para controlar la tecnología a medida que surge»23.
FinanciaciónAgradecemos su apoyo para llevar a cabo el PCR a la Gerencia y la Dirección Médica del HCSC, a la Fundación Koplovitz y a la Fundación de Investigación del HCSC.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.

