




Introducción
Hasta hace no muchos años el MIR de las diferentes especialidades quirúrgicas y cualquier cirujano consciente de sus necesidades de formación continuada se regía por el principio establecido por William Halsted en el Johns Hopkins: "mirar uno, hacer uno, enseñar uno" y así, mirando, ayudando y realizando procedimientos cada vez más complejos iban adquiriendo las habilidades quirúrgicas que posteriormente desarrollaban en su práctica1. Eran tiempos de menos innovaciones técnicas y menos exigentes en resultados, incluyendo el coste del tiempo quirúrgico, que se incrementa año a año. Se ha calculado que el coste anual por gasto en la formación de residentes en EE.UU. puede exceder de los 50 millones de dólares2.
Los procedimientos endoscópicos y las intervenciones quirúrgicas mínimamente invasivas han supuesto, con su crecimiento exponencial en las últimas décadas y sus resultados, una auténtica revolución. Afectan a todas las especialidades quirúrgicas, desde la cirugía general y del aparato digestivo, presente en cualquier hospital comarcal, hasta a la neurocirugía o la cirugía cardíaca de los hospitales de tercer nivel, y suponen un desafío al actual statu quo.
Este cambio condiciona la necesidad de conocimientos y el desarrollo de habilidades técnicas que no se pueden adquirir como preconizaba Halsted, ya que supondría un perjuicio para los pacientes y su coste económico sería inasumible.
La reducción sustancial de la jornada laboral semanal que se avecina, las importantes consecuencias económicas y sociales de los errores médicos y el desarrollo de alternativas a la formación en el quirófano asistencial han terminado por potenciar el aprendizaje en centros de entrenamiento. Visión ya adelantada por los líderes de los departamentos quirúrgicos no hace mucho tiempo3.
Se han utilizado en las últimas décadas simples maniquíes de plástico, vísceras de animales, cajas de entrenamiento con visión directa y limitaciones en la movilidad del instrumental, simuladores virtuales más o menos avanzados o animales anestesiados. Todos estos sistemas en mayor o menor medida pueden acortar los tiempos de aprendizaje de las diferentes habilidades requeridas para la realización de estos procedimientos.
Además se están empezando a generalizar sistemas de evaluación que permiten valorar las capacidades técnicas adquiridas. Tanto recurriendo a la observación directa y al análisis estructurado como al registro en vídeo y al estudio de las imágenes utilizando escalas de valoración global. Sistemas que a su vez pueden ser útiles para decidir la superación de determinados niveles de capacitación técnica.
Dado que en los requerimientos de los programas de formación de cirugía general y del aparato digestivo que se están actualizando parece que se exigirá la asistencia a un curso de cirugía endoscópica básica de R3 y otro de cirugía endoscópica avanzada de R5, y una rotación por las unidades de endoscopia digestiva, consideramos importante revisar los sistemas de simulación disponibles en la actualidad, ya que creemos que serán necesarios a corto plazo.
Simuladores
Se entiende por un simulador para el entrenamiento cualquier sistema que permita una imitación lo más real posible de los gestos necesarios para la realización de un procedimiento específico. Hay simuladores simples que son muy útiles en diversos campos de la medicina y cuyo uso está ampliamente generalizado; es el caso de los maniquíes utilizados para el aprendizaje de la canulación venosa, de las maniobras de resucitación cardiopulmonar, intubación orotraqueal, aplicables en entornos de formación de estudiantes y formación continuada de diferentes especialidades.
En el ámbito de la cirugía, y considerando que en ocasiones son los cirujanos quienes realizan los procedimientos endoscópicos digestivos, se puede utilizar simuladores de endoscopias digestivas o simuladores de técnicas laparoscópicas.
Simuladores de endoscopias digestivas
Modelos plásticos estáticos. Fueron los primeros en ser utilizados, en la década de los setenta, tanto en Alemania por Classen y Ruppin en Erlangen como en Gran Bretaña por el grupo londinense de Williams. Resultaron de gran utilidad en aquel momento para la adquisición de habilidades en la endoscopia flexible4,5. En algunos casos, como el modelo que popularizó Lucero, se incluían dibujos de posibles hallazgos patológicos6. En la actualidad todavía se utilizan estos modelos en las Universidades de Dundee y Liverpool o en el Erasmus Medical Center de Rotterdam en Holanda tanto para fases iniciales como para la aplicación de medios terapéuticos.
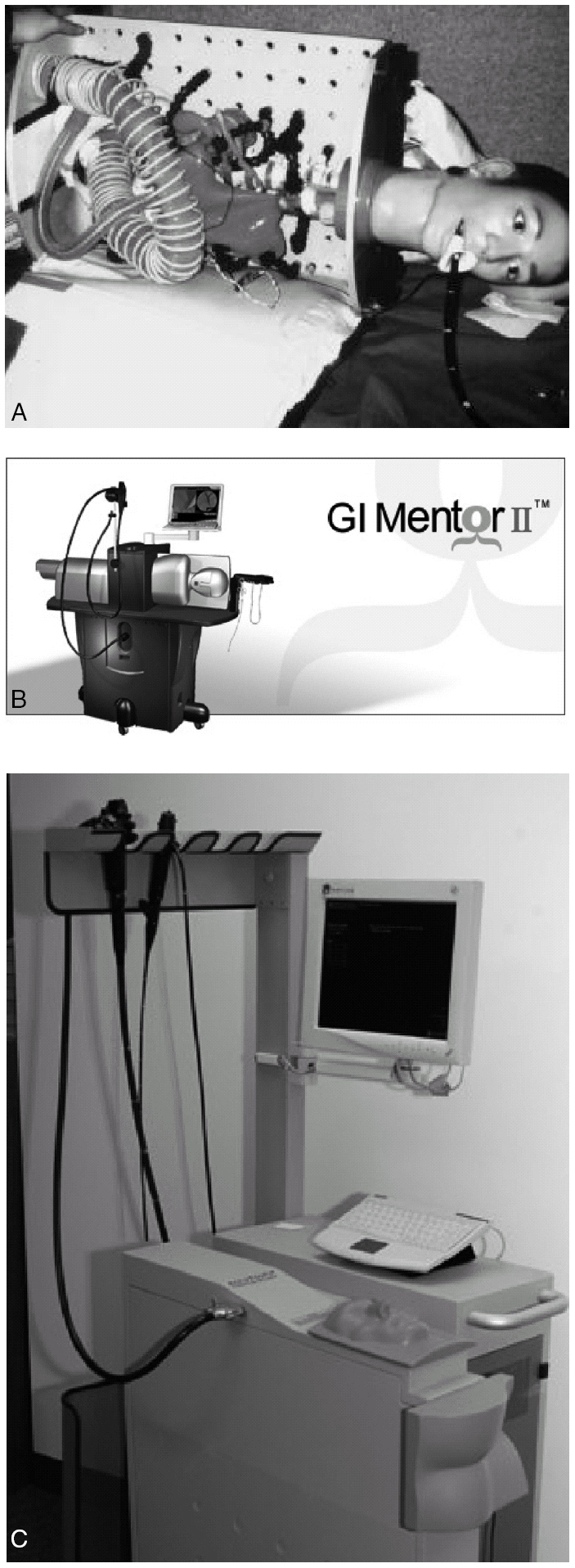
El Interphant Model (fig. 1A) es el más avanzado de este tipo, fue desarrollado por Grund et al en Tebingen, Alemania, permite utilizar diferentes módulos que representan diferentes áreas anatómicas y situaciones clínicas.
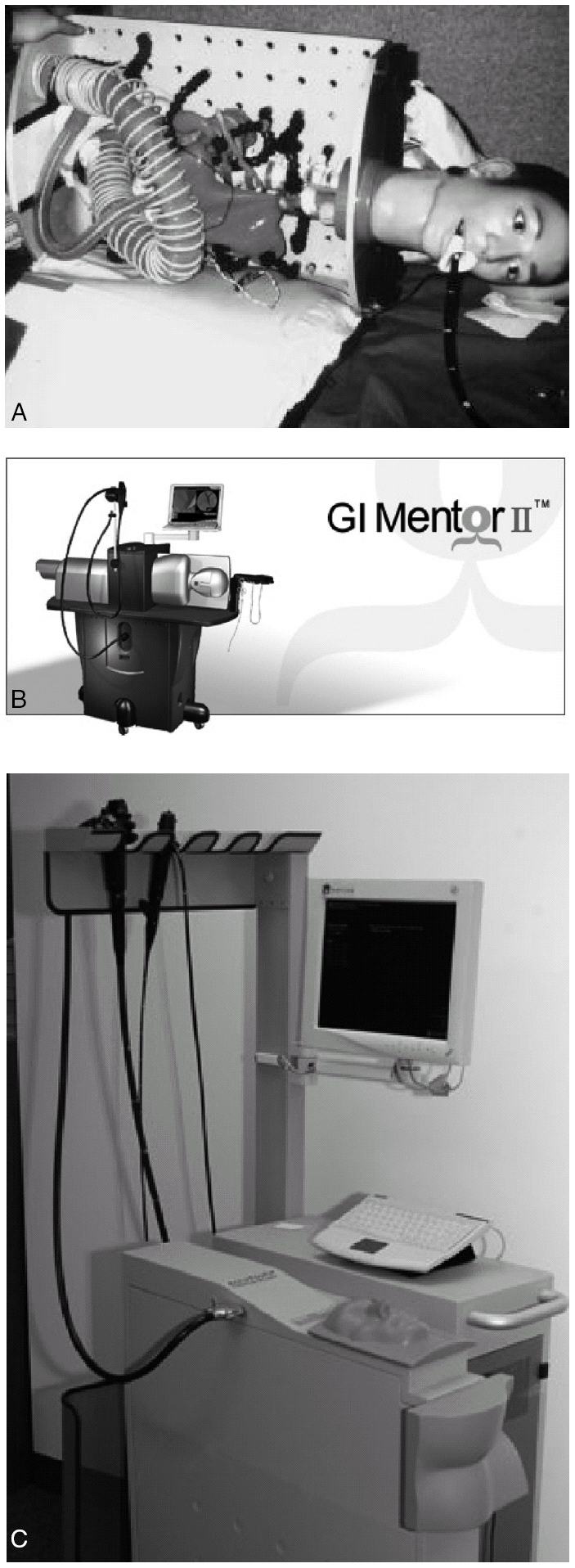
Fig. 1. A: el Interphant Model de Grund. B: el simulador GI Mentor II. C: el AccuTouch Endoscopy Simulator.
Estos simuladores permiten introducir endoscopios flexibles de diferentes calibres y longitud así como practicar cortes, la utilización de asas de diatermia y la colocación de stents. Sus principales limitaciones son la realización de procedimientos para los que se requiera una separación o diferenciación de las distintas capas de la pared intestinal para la inyección de sustancias, ligadura con bandas, etc.7. Circunstancia que ha mejorado al integrar vísceras de animales como en el Erlangen Active Simulator for Interventional Endoscopy (EASIE) de Hochberger y Neumann, del que trataremos más adelante.
Simuladores virtuales de endoscopia
Se entiende por realidad virtual al conjunto de tecnologías que permiten al usuario interactuar de forma eficiente con bases de datos computarizadas de tres dimensiones en tiempo real utilizando sus sentidos y habilidades8. Por tanto, con un sistema de realidad virtual quirúrgico se puede realizar una intervención laparoscópica simulada a través de una interfaz utilizando instrumentos semejantes a los propios del procedimiento real.
Estos sistemas de simulación se pueden descomponer en dos subsistemas: el subsistema de interfaz con el cirujano y el subsistema de sensores. El primero tiene por objetivo proporcionar al usuario una imagen realista de la reconstrucción por ordenador de los diferentes órganos y combina técnicas avanzadas de gráficos por ordenador con técnicas específicas de visualización. El subsistema de sensores está compuesto por un conjunto de dispositivos conocidos como haptics. El diseño y el modo de interacción que permiten estos dispositivos dependen de la endoscopia o intervención quirúrgica a simular. Los más recomendables son aquellos que poseen realimentación de fuerzas, para lograr una sensación táctil más real. Cada uno de estos subsistemas suele estar controlado por una estación de trabajo independiente, de forma que en el primer caso la gran potencia gráfica disponible es capaz de refrescar los sistemas de visualización al menos 15 veces por segundo. Se consigue así una visión suave y continua de la navegación y manipulación en el entorno virtual. En el otro caso se necesita una estación de trabajo de gran potencia de cálculo, con una capacidad de refresco del haptic de al menos 400 veces por segundo9. Esta diferencia se explica porque el ser humano posee mucha más resolución en el sentido del tacto que en el de la vista y, por tanto, para tener una sensación de continuidad precisa de una mayor velocidad de refresco.
Desde la década de los ochenta se empezó a adaptar los videojuegos convencionales para fomentar la coordinación de ambas manos y así desarrollar habilidades específicas. Noar en Baltimore desarrolla el Robotics Interactive Endoscopy Simulation System (RIES) para endoscopia digestiva alta y colangiopancreatografía retrógrada endoscópica, de un alto nivel de perfección técnica pero que no tuvo gran aceptación debido a lo poco manejable que resultaba el voluminoso ordenador necesario para su funcionamiento10. Circunstancia obviada por los nuevos simuladores que se aprovechan del gran desarrollo actual de la informática.
El GI Mentor IITM de Simbionix (fig. 1B) ha mejorado al GI-Mentor I que presentó Bar-Meier en Israel en 2000. Éste ya ofrecía diferentes niveles de dificultad y permitía el desarrollo de procedimientos diagnóstico-terapéuticos del tracto digestivo superior, incluida el área biliopancreática, y del inferior. El primero, presentado en 2002, ha aumentado la rapidez de carga y feedback del programa, la pantalla es sensible al tacto y ha mejorado la plataforma en tamaño, la versatilidad y las posibilidades de desplazamiento. Se mantiene el realismo al disponer de una buena imagen, cambiante en función de la progresión por el tubo digestivo y mandos muy parecidos a los que se utilizan diariamente en las salas de exploración. En la actualidad estos simuladores son líderes de ventas en Europa y centros como el Huddinge Center for Advanced Medical Simulation de Suecia o el Catherina Hospital de Holanda los utilizan; lo fabrica SimbionixTM.
El AccuTouch Endoscopy Simulator (fig. 1C) posee un poderoso feedback y un diseño muy simplificado, con menos exigencias de espacio, es utilizado ampliamente en EE.UU. por centros como el Clinical Simulation Center o en la Wolfon Endoscopy Unit del St. Mark's Hospital dentro del National Endoscopy Training Programme británico; lo fabrica Immersion.
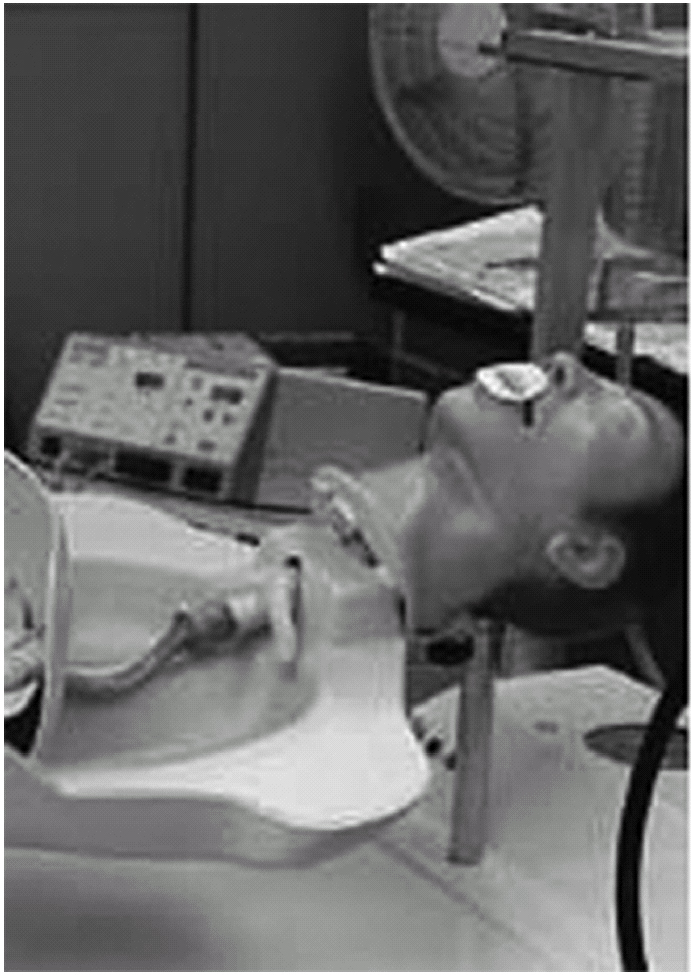
Simuladores mixtos. Los simuladores mixtos, también denominados biosimuladores al incorporar vísceras u órganos de animales sacrificados recientemente en los macelos, permiten un adecuado campo de simulación, mejorado y ampliado, al incorporar sistemas de perfusión o cambios en la anatomía de la víscera que imitan lesiones hemorrágicas, estenosis, etc. Tanto Freys con una víscera aislada como Hahn utilizando todo un paquete visceral de cerdo pudieron enseñar una amplia variedad de técnicas. El Erlangen Active Simulator for Interventional Endoscopy (EASIE) de Neumann y Hochberger es el primero que incorpora la posibilidad de realizar procedimientos de hemostasia en lesiones hemorrágicas, la colocación de bandas sobre aparentes varices o colocar prótesis autoexpandibles en estenosis (fig. 2). La Erlangen Chirurgie and Endoskopie Training GMBH lo ha utilizado en más de 350 cursos con más de 4.000 participantes, sobre todo alemanes, y es recomendado por múltiples sociedades científicas, sobre todo del ámbito germano. Se utilizan fibro o videoendoscopios convencionales y todo el material auxiliar con el que habitualmente se trabaja en las salas de endoscopia.
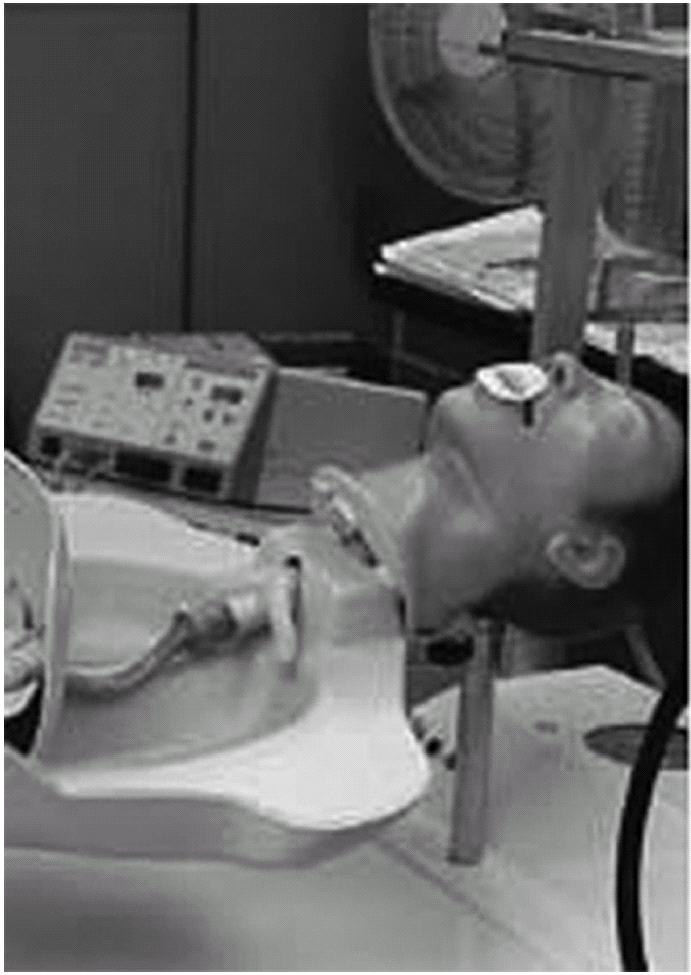
Fig. 2. El Erlangen Active Simulator for Interventional Endoscopy (EASIE).
Animales anestesiados. Se ha recurrido a animales para el desarrollo de habilidades básicas en endoscopia, sobre todo a principios de los noventa, al extenderse la utilización de la colangiopancreatografía retrógrada endoscópica (CPRE). Sin embargo, para la endoscopia del tracto digestivo el fácil acceso de algunos MIR a las salas de endoscopia y los inconvenientes de recurrir a los animales, que han de estar anestesiados y monitorizados, no han permitido generalizar esta práctica, más utilizada por los cirujanos para los más complejos procedimientos laparoscópicos.
Las exigencias de los comités éticos, los altos costes de los quirófanos experimentales que han de contar con equipamiento y personal especialmente adiestrado limitan mucho su uso de forma generalizada. Aunque la sensación de tejido natural, elasticidad y feedback que transmiten las vísceras y los órganos del animal no han sido superadas por ningún otro sistema. Diferencias anatómicas como la existencia de un prominente fundus gástrico, el drenaje independiente del colédoco y del conducto pancreático en el duodeno o la disposición del hemicolon derecho han de tenerse en cuenta.
Simuladores de técnicas laparoscópicas
Simuladores simples (cajas). Se considera que lo que más condiciona la aplicación de las destrezas del cirujano al ámbito laparoscópico son el sistema óptico indirecto bidimensional y la utilización de instrumental distinto del habitual, más largo y con movimientos limitados por el trocar por el que se introduce. De ahí que inicialmente se diseñaran sistemas simples de simulación que jugaban con estas dos variables. Consisten en cajas de entrenamiento con una cámara de vídeo, laparoscopio, webcam o incluso un espejo que permiten una visión indirecta de lo que ocurre y dos canales de trabajo que pueden o no tener un trocar por el que introducir pinzas, tijeras, etc., que se mueven en el interior. El video-endoscopic laparoscopic cart and trainer box simulator descrito por Deroissis11 o el Mirrod box simulator (Simuview Suture Trainer; Simulab Corporation) pueden considerarse de este tipo de simuladores. Múltiples estudios demuestran su gran utilidad y las posibilidades de evaluación que permiten12-14. Sobre estas bases se ha desarrollado algunos programas de simulación como el Dundee Endoscopic Psicomotor Tester (DEPT) de Cuschieri, con un soporte que acepta instrumentos endoscópicos convencionales y una cámara, con una caja de prueba con múltiples posibilidades y una conexión a un ordenador que almacena datos. Su análisis posterior permite valorar las habilidades psicomotrices del cirujano15,16.
Desde que se ha desarrollado los robots no sólo se puede utilizar los instrumentos endoscópicos convencionales sino que también se puede utilizar el Zeus Robotic Surgical System (Computer Motion, Goletta, CA, EE.UU.) o el Da Vinci Surgical System (Intuitive Surgical, Mountain View, CA, EE.UU.) para realizar las diferentes prácticas. En los estudios realizados, comparando ambos medios parece que los instrumentos endoscópicos convencionales permiten más rapidez y los robots pueden ser más precisos17.
Simuladores virtuales de laparoscopia
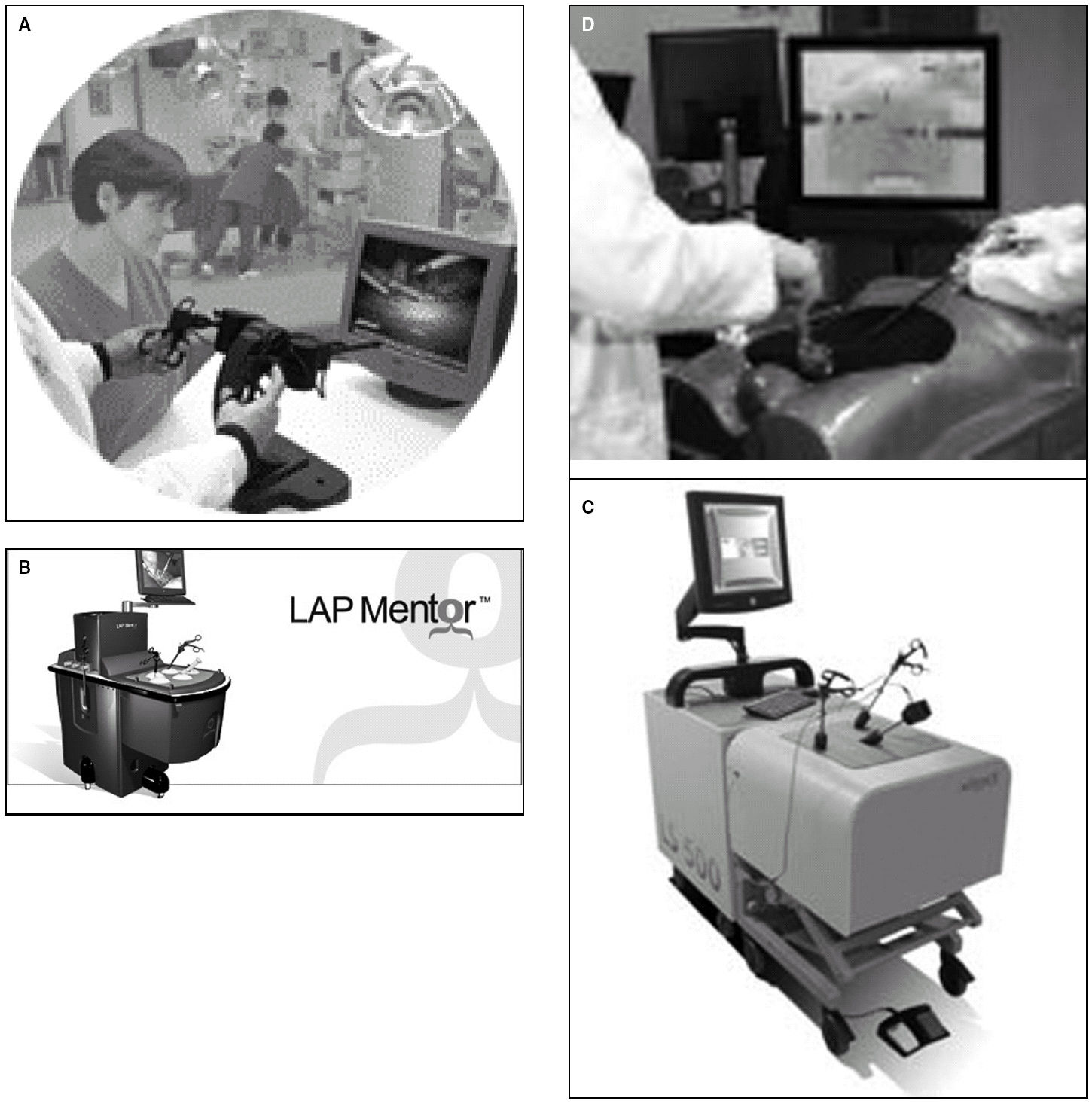
Hay distintos dispositivos en el mercado relacionados con el entrenamiento quirúrgico mínimamente invasivo que utiliza la realidad virtual (minimally invasive surgical trainer-virtual reality/MIST-VR) (fig. 3): el Reachin's Laparoscopic Trainer lo distribuye Reachin Technologies AB (Australia, Singapur y Suecia), Sim Surgery Sim Surgery AS (Noruega), Procedius, Minimally Invasive Surgical Trainer-Virtual Reality (MIST-VR) Mentice (Suecia), Virtual Endoscopic Surgery Training (VEST) Select-IT Systems AG, Lap Sim® System Surgical Science (Suecia), el Virtual Laparoscopic Interface (VLI) y el Laparoscopic Surgical Workstation (LSW) Immersion Corporation, el Xitact LS 500 Laparoscopic simulator Xitact SA (Suiza), el Lap Mentor Simbionix y el ProMISTM Haptica (EE.UU.). En la tabla 1 se presentan los diferentes modelos, la empresa que los comercializa y su catálogo de aplicaciones. Son los simuladores virtuales más conocidos y de más amplia distribución en estos momentos.
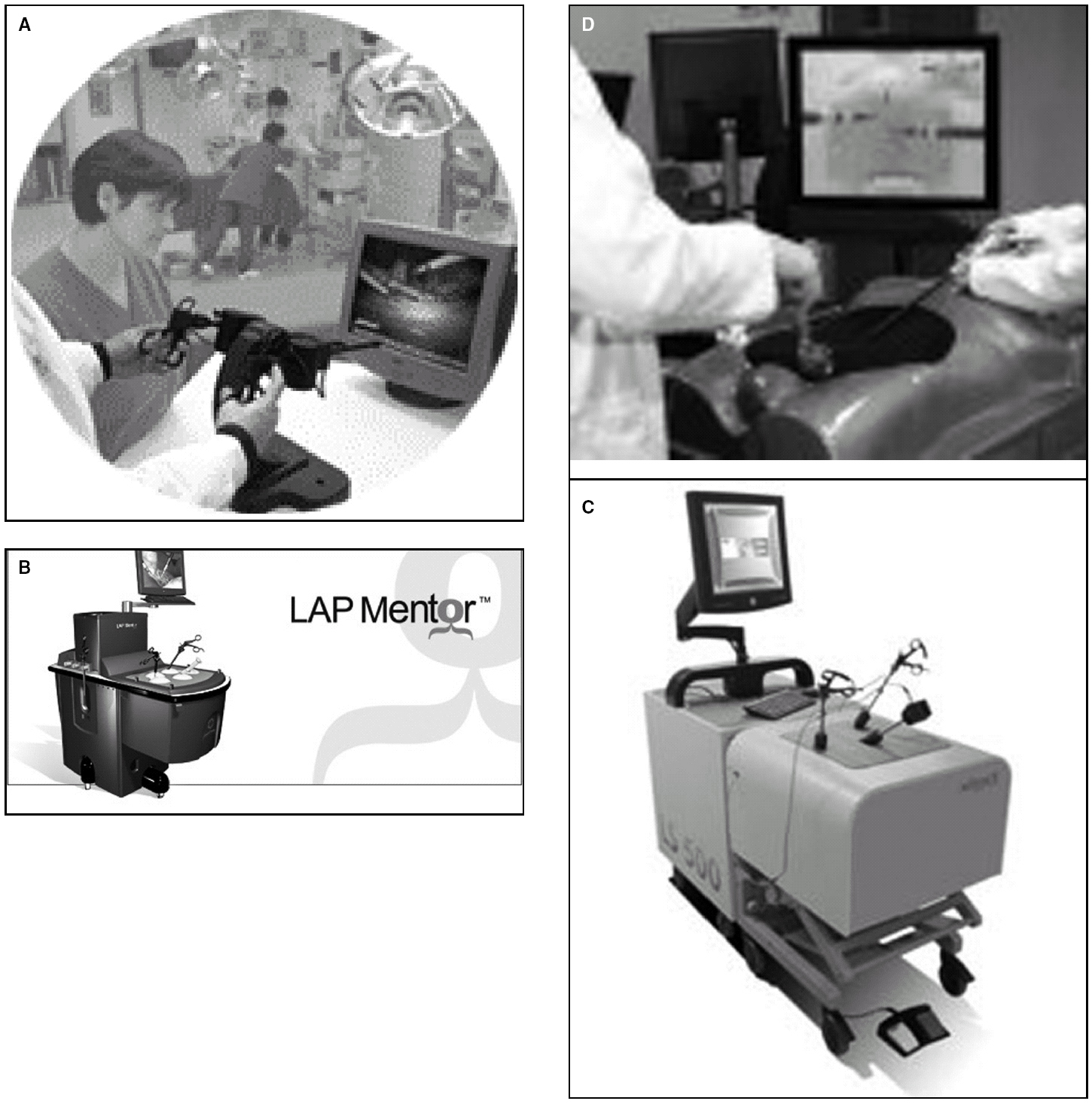
Fig. 3. A: el Sim Surgery. B: el Lapmentor. C: el LS500. D: el ProMIS.
De la mayoría ya hay amplia experiencia, con estudios que demuestran su utilidad tanto para reducir errores como para servir como método de evaluación18-20. Están disponibles para su utilización en los centros de entrenamiento mejor dotados del mundo. Schijven y Jakimovicz21 ofrecen datos relacionados con sus ventajas y limitaciones con el objeto de poder elegir el más adecuado a las necesidades de cada uno, aunque concluyen afirmando que es recomendable probarlos antes de decidirse por alguno.
Animales anestesiados. Para autores como Gómez-Fleitas "... hasta que el avance tecnológico consiga un más alto grado de realismo en la simulación y se obtenga una buena relación coste-eficiencia, la cirugía con animales constituye el procedimiento más adecuado para el entrenamiento quirúrgico a pesar de los inconvenientes del coste económico, algunas diferencias anatómicas y los aspectos éticos..."22. Se ha utilizado desde conejos hasta pollos, o incluso ratas (Sprague Dawley)23, aunque han sido los perros, las ovejas y sobre todo los cerdos los animales más utilizados. Este último es un modelo en el que se puede reproducir con gran realismo la mayoría de las intervenciones quirúrgicas laparoscópicas del humano. Se ha de tener en cuenta, no obstante, las diferencias que la anatomía comparada del abdomen nos describe:
1. Una mayor distancia xifopúbica.
2. En los cerdos de aproximadamente 30 kg, que son los más utilizados, un peritoneo parietal laxo que en ocasiones hace recomendable utilizar el trocar de Hasson supraumbilical.
3. Una segmentación hepática que dificulta la separación del hígado y nos obliga a recurrir a algún tipo de separador: de abanico, neumático, etc.
4. Un pedículo de la vesícula biliar más largo y laxo, y con un cístico y arteria cística de menor calibre.
5. Un estómago con un gran fundus (divertículo verdadero) y sin transcavidad de los epiplones.
6. Un hiato esofágico algo más anterior y con un esófago abdominal amplio, sin hernia hiatal.
7. Un bazo alargado y con una disposición más anterior debido a que, junto a gran parte del páncreas, es totalmente intraperitoneal.
7. Una desembocadura del colédoco independiente del conducto pancreático, en el borde mesentérico de la primera porción duodenal.
8. No existe marco cólico. El colon sólo se parece al humano en el área rectosigmoidea, aunque sin fijación retroperitoneal, el resto da vueltas sobre sí mismo y se sitúa en la zona central de la cavidad abdominal24.
Se puede considerar estas diferencias como las más notables y que pueden condicionar más la reproducción de las diferentes maniobras que requieren los procedimientos laparoscópicos.
La reciente publicación en el BOE n.o 252, del 21 de octubre de 2005, del Real Decreto 1201/2005, de 10 de octubre, sobre protección de los animales utilizados para experimentación y otros fines científicos, tiene como objeto establecer normas para evitar que se cause dolor, sufrimiento o angustia innecesarios a los animales. Pretende reducir al mínimo el número de animales, que se les atienda de forma adecuada y en lo posible que se recurra a métodos alternativos, conceptos englobados en el "principio de las tres erres" (reducción, refinamiento y reemplazo). Se especifican las condiciones de alojamiento y manejo de los animales en los centros, el transporte y los registros necesarios. Se exige una cualificación del personal que maneja los animales y especificar los procedimientos a realizar, que a su vez deben ser comunicados al comité ético de bienestar animal que debe tener el centro25.
Hasta ahora, centros del prestigio del European Institute of Telesurgery (IRCAD/EITS) de Estrasburgo o del Centro de Cirugía de Mínima Invasión en Cáceres y en la mayor parte de los cursos-talleres que se realizan en Madrid, Sevilla, Barcelona, Castellón y Oviedo se ha utilizado de forma masiva cerdos para el adiestramiento de cirujanos que se iniciaban o perfeccionaban algunas técnicas laparoscópicas, la mayoría en prácticas intensivas de 2-5 días de duración. Así se han introducido muchos en las técnicas endoscópicas, aunque esta formación, debido al tipo de entrenamiento que se requiere y a disponer de muy poco tiempo, sea cuestionada en muchos ámbitos, sobre todo cuando se dirige a MIR26.
La incorporación de simuladores como medio complementario de formación permitiría una más dilatada y efectiva adquisición de conocimientos y habilidades; de hecho se está ampliando su uso en aquellos ambientes más sensibles y competitivos. Sistemas sanitarios como el National Health System británico con programas como el National Endoscopy Training Programme o el University of Michigan Health System (UMHS) en EE.UU. disponen de centros donde están disponibles simuladores y programas risk free, hands-on no sólo para cirujanos sino también para anestesistas, pediatras... Universidades como la de Mississippi en EE.UU. u hospitales como el Huddinge University Hospital en Suecia disponen ya de centros de simulación avanzados con programas formativos estructurados para sus propios cirujanos en formación. En España, la Junta de Andalucía está poniendo en marcha el IAVANTE con una inversión que ronda los 10 millones de euros; otras comunidades, con la colaboración de instituciones sanitarias, universidades y empresas vinculadas a las nuevas tecnologías, también están empezando a equipar centros de simulación equivalentes.
Una de las principales quejas de los MIR es "el escaso feed-back que existe entre los evaluadores de la unidad docente y los médicos en formación"27. La evaluación continua se materializa en una supuesta entrevista con el tutor y en la cumplimentación del libro del residente. El programa formativo hace referencia a los cursos y rotaciones que debe realizar, concreta la cantidad mínima de procedimientos que debe efectuar y presenta un baremo orientativo del grado de complejidad de las intervenciones quirúrgicas, pero no especifica las opciones metodológicas y pedagógicas que deben utilizarse. Además de garantizar todo lo anterior, disponer de espacios con equipamiento adecuado y formadores cualificados que permitan un entrenamiento y una evaluación estructurada de los avances técnicos que se van logrando, será en breve uno de los aspectos que los MIR deberían tener en cuenta en el momento de elegir dónde y con quién formarse porque, como ya ocurre en otros ámbitos, puede que la evaluación de habilidades empiece a plantearse.
Otro aspecto a considerar es la dificultad que tienen algunos cirujanos dedicados desde hace muchos años a campos concretos en los que han conseguido desarrollar capacitaciones específicas (cirugía esofagogástrica, colorrectal, endocrina) para introducir en su práctica el acceso mínimamente invasivo. Esta circunstancia explica el mayor desarrollo relativo de este abordaje en algunos hospitales comarcales que lideran en la actualidad el impulso de estos procedimientos. Tener a su alcance la posibilidad de aprender y desarrollar habilidades propias en un tiempo adecuado y minimizando el riesgo para los pacientes impediría la marginación a que son sometidos en ocasiones y continuar participando de forma plena en el desarrollo de la cirugía.
Correspondencia:
Dr. J.I. Rodríguez García.
Gil Blas, 20, 6.o B.
33008 Oviedo. Asturias. España.
Correo electrónico: joseignacio.rodriguez@sespa.princast.es
Manuscrito recibido el 17-11-2005 y aceptado el 13-12-2005.

