




Objetivos: La elaboración de programas de rehabilitación específicos para los distintos tipos de inestabilidades en la muñeca.
Método: Con los conocimientos de biomecánica que disponemos y teniendo en cuenta los últimos descubrimientos sobre mecanorreptores en muñeca y tras hacer una revisión bibliográfica en la que se encuentran escasas publicaciones específicas sobre el tema, se pone en marcha la elaboración de distintos programas para la rehabilitación de las inestabilidades escafolunares, lunopiramidales y tras reparación artroscópica del fibrocartílago triangular.
Resultados: Dichos protocolos se están poniendo en marcha en nuestro Servicio de Rehabilitación con resultados muy aceptables.
Conclusiones: Es necesario llevar a cabo un tratamiento rehabilitador posquirúrgico adecuado en cada tipo de inestabilidad para lograr resultados óptimos. Con la experiencia de la que ya disponemos, nuestro próximo objetivo será la realización de estudios retrospectivos para objetivar los resultados funcionales tras los tratamientos pautados.
Objectives: To design specific rehabilitation programs for the different types of wrist instability.
Method: With the biomechanical knowledge available and taking into account the latest discoveries on mechanoreceptors in the wrist, and after performing a literature review in which few publications were found on the specific subject, it was decided to design and prepare different programs for the rehabilitation of scapholunate and lunate-pyramidal instabilities, and after arthroscopic repair of the triangular fibrocartilage.
Results: These protocols are now being used in our Rehabilitation Department, with very acceptable results.
Conclusions: Rehabilitation needs to be carried out after surgery, and appropriate to each type of instability in order to achieve optimal results. With the experience that we now have, our next objective will be to conduct retrospective studies to examine the functional results after the prescribed treatments.
Movilidad y estabilidad son dos características presentes y esenciales para el buen funcionamiento de cualquier articulación, pero de gran relevancia en la articulación de la muñeca.
La causa más frecuente de inestabilidad carpiana es la lesión del ligamento escafolunar (90%), seguida de la lesión del ligamento lunopiramidal1,2. En cuanto a las inestabilidades de la articulación radiocubital distal, la lesión del complejo fibrocartílago triangular es la causa más frecuente que la provoca.
Debido a los avances en la cirugía artroscópica de las inestabilidades de la muñeca, se requiere la elaboración de programas específicos de rehabilitación para cada tipo de inestabilidad. Dada la escasez de protocolos rehabilitadores para este tipo de patologías existentes en la literatura científica, y ante la necesidad generada en nuestro servicio de rehabilitación por el incremento de este tipo de intervenciones quirúrgicas, se pone en marcha la elaboración y la puesta en práctica de programas de recuperación funcional tras la reparación artroscópica del fibrocartílago triangular y tras el tratamiento artroscópico de las inestabilidades escafolunares y lunopiramidales. Para tal fin, se tienen en cuenta los conocimientos biomecánicos de los que se dispone sobre estabilidad articular de la muñeca, no solo a nivel estático, sino también desde el punto de vista dinámico, en el que desempeña un papel muy importante la musculatura.
Es necesario llevar a cabo un tratamiento rehabilitador posquirúrgico adecuado en cada tipo de inestabilidad para lograr unos resultados óptimos. Tan importante es la reparación de las inestabilidades como el adecuado programa rehabilitador posquirúrgico, no solo por evitar poner en peligro dichas reparaciones con ejercicios inapropiados, sino por encaminar la recuperación funcional de la muñeca con potenciación de determinados grupos musculares que contribuyan a la estabilidad dinámica de la misma.
En los últimos años también se está dando mucha importancia a la propiocepción, tras el descubrimiento de los mecanorreceptores en los ligamentos del carpo, como la capacidad de mantener la cinemática normal en los huesos del carpo cuando fallan los estabilizadores primarios, gracias a la generación de arcos reflejos que pueden influir en la contracción de determinados grupos musculares periarticulares3,4.
Para la elaboración de nuestros protocolos se han valorado una serie de ítems: tiempo requerido de inmovilización, cuándo y con qué tipo de movilizaciones comenzaremos, cuáles son las movilizaciones prohibidas, cuándo iniciar el fortalecimiento muscular y qué grupos musculares habrá que trabajar en cada tipo de reparación, y por último, los ejercicios propioceptivos concretos para la articulación que se va a tratar.
Protocolo rehabilitador tras la reparación artroscópica del fibrocartílago triangularLas estructuras estabilizadoras de la articulación radiocubital distal (ARCD) son: el fibrocartílago triangular (FCT) como principal elemento estabilizador, los ligamentos cubitocarpianos, el músculo pronador cuadrado, el músculo extensor carpi ulnaris (ECU) y la membrana interósea radiocubital. Los dos músculos mencionados desempeñan un papel importantetanto de forma activa como pasiva- en la estabilización. El pronador cuadrado no solo actúa pasivamente como una pared evitando la subluxación palmar del cúbito cuando tenemos el antebrazo en supinación, sino que también colabora activamente en la coaptación de la ARCD. El ECU, cuando tenemos el antebrazo en posición pronada, cruza oblicuamente el antebrazo coaptando la cabeza cubital contra la cavidad sigmoidea del radio, y en supinación se opone dinámicamente a que la cabeza cubital se desplace en sentido palmar.
Para la elaboración del protocolo se han tenido en cuenta dos premisas importantes:
- •
En las fases de protección (primera y segunda fases) se deberá evitar cualquier ejercicio que provoque una varianza cubital positiva (cuán distal está la superficie articular del cúbito con respecto a la del radio5); el máximo vaivén de la epífisis distal del cúbito en sentido distal existe en pronación máxima y haciendo el puño.
- •
En la fase de fortalecimiento se deberá potenciar: el músculo pronador cuadrado y el ECU como estabilizadores de la ARCD.
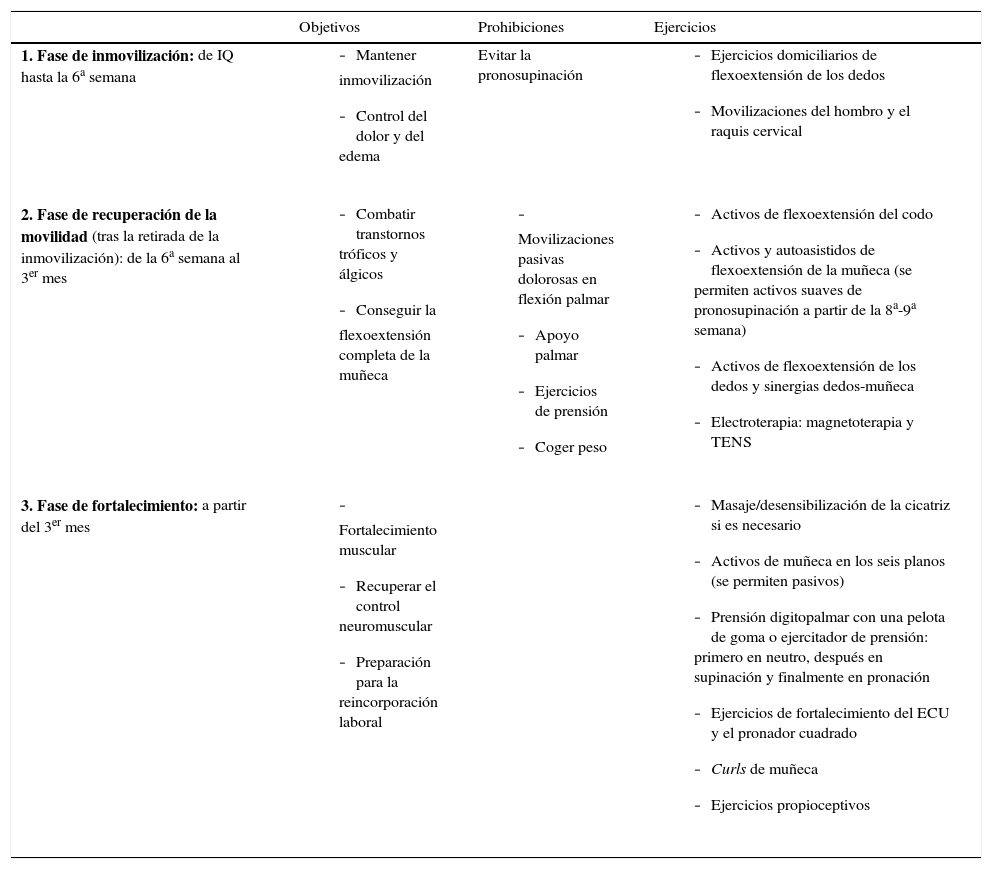
Tomando como referencia los protocolos de Savoie y O’Brian6, elaboramos un nuevo protocolo en el que se da una gran importancia a los tiempos, los grupos musculares que se van a trabajar y la propiocepción (tabla 1):
- •
Fase 1: fase de inmovilización (desde el momento de la cirugía hasta la sexta semana después). En esta fase se coloca un yeso braquial en supinación media que se mantiene durante 4 semanas para evitar que el paciente realice el movimiento de pronosupinación7. A la cuarta semana se cambiará por uno antebraquial y se dejará el codo libre. Durante este período se enseñarán al paciente ejercicios de flexoextensión de los dedos8 para que realice en su domicilio, para evitar la posible tenodesis y disminuir el edema de partes blandas, así como movilizaciones de hombro y de raquis cervical.
- •
Fase 2: fase de recuperación de recorridos articulares (desde sexta semana hasta el tercer mes). Tras la retirada de la inmovilización en la sexta semana, nuestro objetivo principal debe ser la recuperación completa de la flexoextensión de la muñeca. Se realizarán tres tipos de ejercicios: activos de flexoextensión del codo, activos de los dedos, y en cuanto a la muñeca, se realizarán activos y autoasitidos de flexoextensión de la muñeca. A partir de la octava o novena semanas permitiremos realizar ejercicios activos de pronosupinación no forzada en actividades de la vida diaria6. En esta primera fase de rehabilitación en el gimnasio, el paciente se suele beneficiar de electroterapia analgésica tipo TENS (del inglés, Transcutaneus Electrical Nerve Stimulation) o de magnetoterapia por su efecto estimulador del metabolismo y vascular, así como antiinflamatorio. No se trabajará el fortalecimiento muscular. En este período debemos evitar forzar movilizaciones pasivas de flexión palmar, así como gestos que impliquen apoyo palmar y coger peso, ya que provocan una compresión axial del carpo y, como consecuencia, ponen en peligro la reparación.
- •
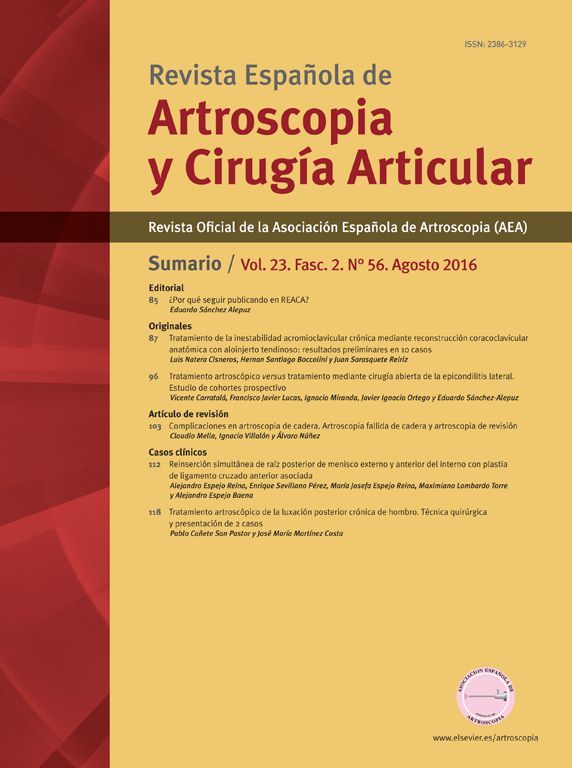
Fase 3: fase de fortalecimiento y propiocepción (a partir del tercer mes). En esta fase se deben haber recuperado los recorridos articulares completos. En algunos casos faltan los últimos grados de flexoextensión de la muñeca; a pesar de ello, y siempre que no haya dolor, se iniciarán los ejercicios de fortalecimiento y el trabajo propioceptivo. Ya se permite realizar masaje o desensibilización de la cicatriz, en ocasiones molesta en la zona de la sutura. El trabajo articular de la muñeca ya se realizará en los seis planos de movimiento (incluso se podrían trabajar pasivos si ha quedado un déficit de flexión palmar, e incluso asistirse con pequeñas mancuernas). Se comenzará a trabajar la prensión digitopalmar, inicialmente con la muñeca en posición neutra, después en supinación y por último en posición pronada (máxima varianza cubital); la trabajaremos con un pelota de goma o un ejercitador de prensión con muelles. Los ejercicios de fortalecimiento se basarán en la potenciación con gomas elásticas de distintas resistencias del músculo pronador cuadrado y del ECU como estabilizadores de la ARCD (fig. 1). Si no hay dolor podrá trabajarse con pesas de pequeño calibre. Se introducen los curls o circunducciones de muñeca en ambas direcciones.
 Potenciación con gomas elásticas del pronador cuadrado. B) Potenciación del músculo extensor carpi ulnaris (ECU).")
– Protocolo rehabilitador tras la reparación artroscópica del fibrocartílago triangular
| Objetivos | Prohibiciones | Ejercicios | |
|---|---|---|---|
| 1. Fase de inmovilización: de IQ hasta la 6a semana |
| Evitar la pronosupinación |
|
| 2. Fase de recuperación de la movilidad (tras la retirada de la inmovilización): de la 6a semana al 3er mes |
|
|
|
| 3. Fase de fortalecimiento: a partir del 3er mes |
|
|
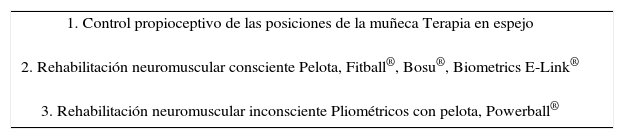
El tratamiento se finalizará con la reeducación propioceptiva de la muñeca. Para ello, el plan estratégico que se deberá seguir será el siguiente (tabla 2)9-11:
- 1.
En primer lugar se trabajará el control propioceptivo de las posiciones de la muñeca: habilidad para reproducir determinados movimientos o angulaciones de la muñeca predeterminados. Lo trabajaremos con la terapia en espejo9 (intentar reproducir con la mano lesionada los movimientos que estamos viendo en el espejo realizados con la mano sana) (fig. 2).
- 2.
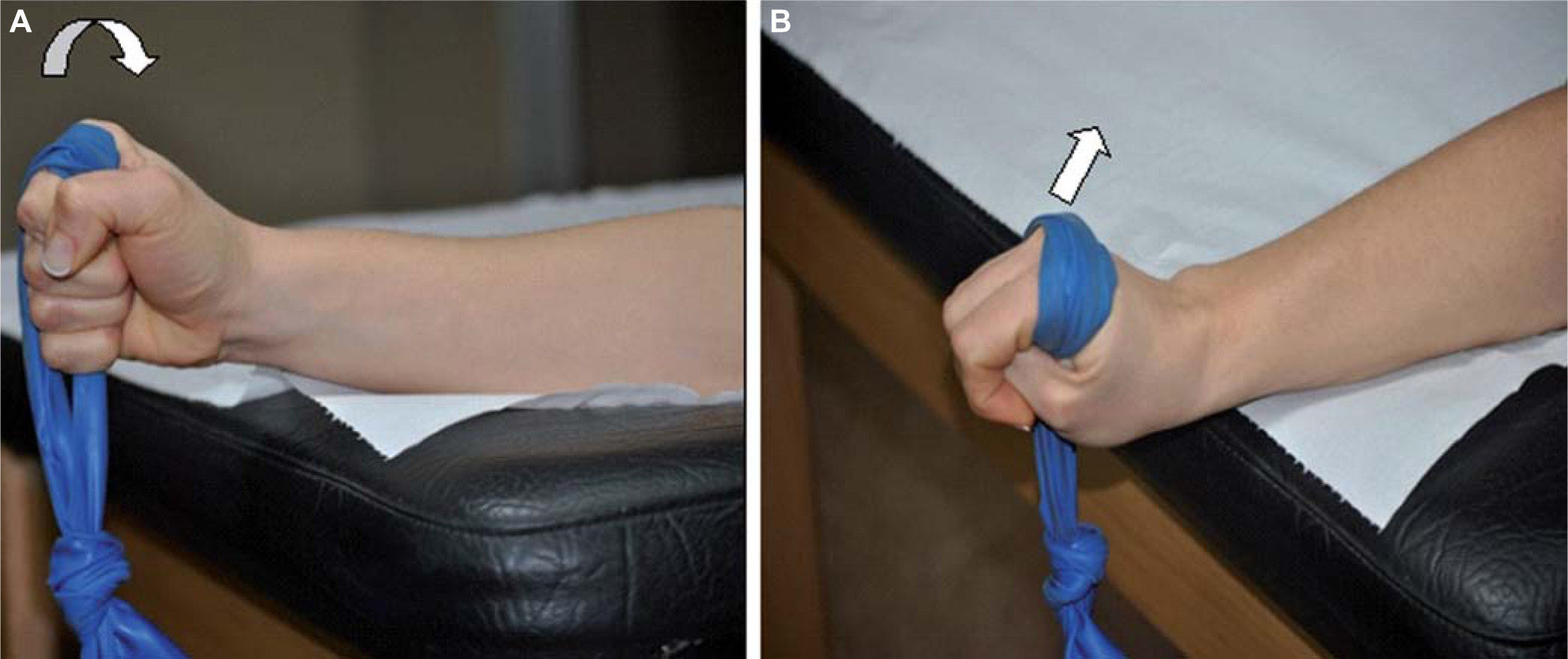
Un segundo paso será trabajar la rehabilitación neuromuscular consciente, es decir, el fortalecimiento de distintos grupos musculares para mejorar la estabilidad de la muñeca. Podemos trabajar isométricos, trabajo concéntrico y excéntrico de la muñeca y la coactivación de determinados grupos musculares: el uso de giros de pelota sobre una superficie coactiva flexores y extensores de los dedos y la muñeca al tiempo que coordina los movimientos de la misma9 (fig. 3). Esto mismo se conseguirá también con instrumentos de base inestable tipo Fitball® (Balón Pilates - Rehab Medic) o Bosu® (Balance Trainer - Rehab Medic). Los sistemas informáticos como Biometricks E-Link® (G-100 - Technologyes S.L.), con un amplio programa de juegos para trabajar la calidad, la velocidad y la precisión del movimiento de muñeca-mano son muy beneficiosos en esta fase final de recuperación (fig. 4).
- 3.
Por último, ya en muñecas en la fase final de rehabilitación y en ausencia de dolor, trabajaremos la rehabilitación neuromuscular inconsciente: pliométricos (movimientos rápidos de extensión-retracción) con pelota de tipo lanzamientos y ejercicios con Powerball® (RPM Sports Ltd.) (fig. 5), giroscopio de precisión que genera diferentes direcciones aleatorias, con el que trabajamos no solo el fortalecimiento sino también la eficiencia neuromuscular, como ya nos describió Axel Balan en 200812. Este instrumento obliga a nuestro antebrazo a reaccionar de una manera impredecible estimulando la propiocepción por las fuerzas multidireccionales que genera el giroscopio provocando contracciones musculares reactivas a ello. Por ello, el uso del Powerball® en pacientes con deficiencias de propiocepción está de sobra justificado12.
 Se observa la mano sana trabajando con una pica el movimiento de extensión. Lo que el paciente ve reflejado en el espejo es lo que intentará reproducir con la mano lesionada justo en el otro lado del espejo (B).")



– Plan estratégico para la reeducación propioceptiva de la muñeca
| 1. Control propioceptivo de las posiciones de la muñeca Terapia en espejo |
| 2. Rehabilitación neuromuscular consciente Pelota, Fitball®, Bosu®, Biometrics E-Link® |
| 3. Rehabilitación neuromuscular inconsciente Pliométricos con pelota, Powerball® |
En definitiva, se mantienen los tiempos de inmovilización hasta la sexta semana. Adelantamos los activos en flexoextensión a las 6 semanas pero iniciamos los activos de pronosupinación a las 8 semanas para proteger la estabilidad de la ARCD. En el protocolo de Savoie se introduce el fortalecimiento a las 8 semanas; sin embargo, en el protocolo elaborado nos esperamos hasta el tercer mes para proteger la reparación y porque de esta forma es mejor tolerado por el paciente. Trabajaremos selectivamente el pronador cuadrado y el ECU como estabilizadores de la ARCD. Damos mucha importancia al trabajo propioceptivo y se introduce como novedad un plan estratégico para la reeducación propioceptiva basándonos en los estudios de Hagert en 20109.
Rehabilitación tras cirugía artroscópica: inestabilidades escafolunaresExisten unas consideraciones previas a la elaboración del programa rehabilitador en este tipo de lesiones:
- -
El segmento intercalar o fila proximal del carpo no presenta ninguna inserción muscular de los músculos que cruzan la muñeca sobre él1.
- -
Su estabilidad va a depender no solo de los ligamentos intrínsecos y extrínsecos sino también de la musculatura de la muñeca1.
- -
Las fuerzas de compresión axial de muñeca van generando presiones de alejamiento de los huesos de esta fila entre sí pudiendo originar lesiones disociativas1.
- -
El movimiento más importante para la estabilidad dinámica del carpo son los movimientos de pronación y supinación intercarpiana provocados por los músculos del antebrazo13,14.
La idea de que los músculos participan en la estabilización dinámica de la muñeca no es nueva: en 1980, Kauer15 ya hablaba del papel que tenían el abductor pollicis longus (APL) y el ECU en la estabilidad del carpo.
En el año 1997, Kobayashi y García Elías, con sus estudios en cadáveres demostraron que la contracción de determinados músculos (extensor carpi radialis longus [ECRL], APL y flexor carpi radialis [FCR]) provocan un aumento de la coaptación del espacio escafolunar, y otros un aumento de la disociación escafolunar (flexor carpi ulnaris [FCU] y ECU)13-16.
También demostraron que la acción combinada de los músculos de la vertiente ulnar (ECU y FCU) tienen un efecto protector del espacio lunopiramidal14.
En 1997, Petrie et al.17 describieron que existe abundancia de mecanorreceptores en los ligamentos de la muñeca. Más adelante, en 2009, Hagert4,9 demostró la existencia de reflejos propioceptivos en la muñeca mediante sus estudios con inserción de electrodos y provocación de estímulos nociceptivos en el ligamento dorsal escafolunar bajo control ecográfico. Esto será la base de nuestro programa de fortalecimento muscular y propiocepción tras la cirugía artroscópica de las inestabilidades escafolunares y lunopiramidales.
Para la elaboración de nuestro protocolo se ha tomado como referencia el propuesto por Quesnot y Chanussot1,18 en el año 2010. Como en el caso anterior, se realizan cambios en cuanto a los tiempos de introducción de determinados ejercicios y se es muy estricto con los grupos musculares que hay que trabajar para estabilizar la articulación reparada (en el protocolo mencionado no se especifica qué grupos musculares son los que deberemos trabajar selectivamente). Introducimos también el trabajo propioceptivo al igual que en el protocolo tras la reparación artroscópica del FCT.
Las fases del protocolo de rehabilitación tras la cirugía artroscópica del ligamento escafolunar son las siguientes (tabla 3):
- -
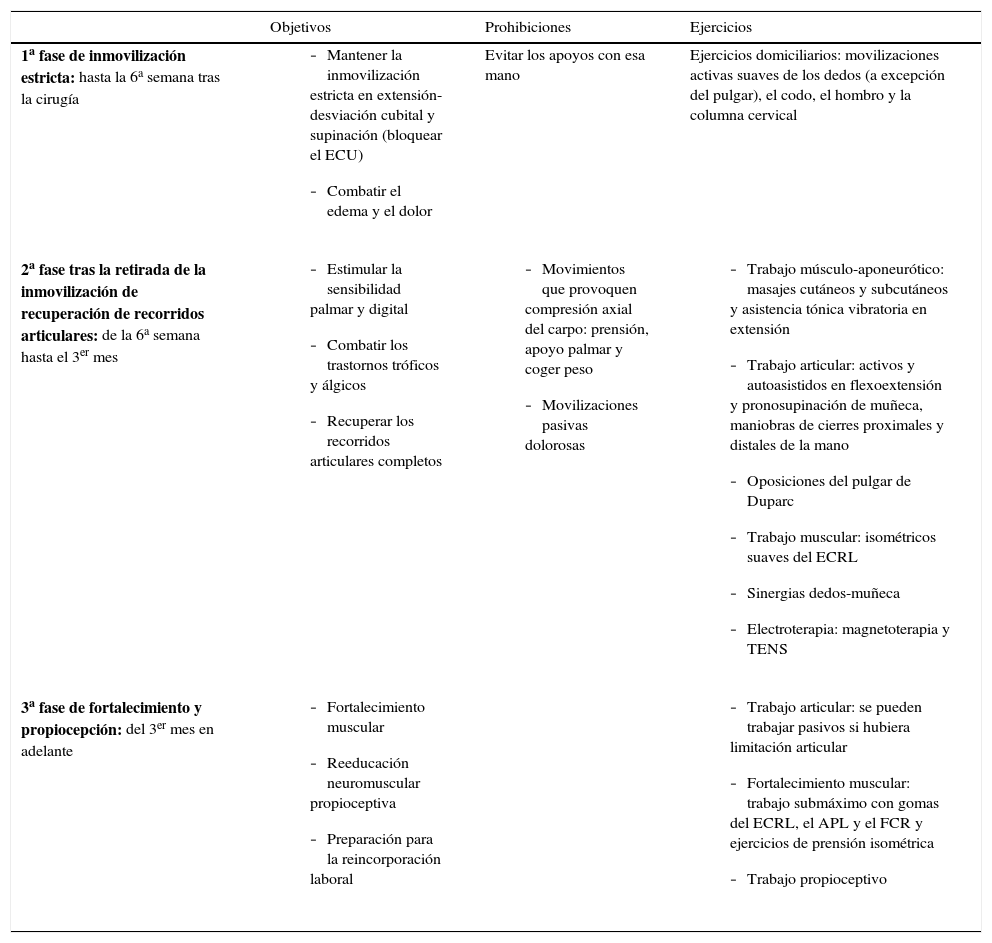
Fase 1: inmovilización estricta; hasta la sexta semana tras la cirugía. En esta fase el paciente presenta el antebrazo inmovilizado en supinación, extensión y desviación cubital (con la finalidad de bloquear el ECU, cuyo trabajo puede perjudicar la reparación). Se le pautarán ejercicios para que realice en su domicilio a base de movilizaciones activas de los dedos (a excepción del pulgar), el codo, el hombro y la columna cervical, para evitar contracturas y rigideces.
- -
Fase 2: tras la retirada de la inmovilización y las agujas; desde la sexta semana hasta el tercer mes. Los objetivos aquí serán tres: primero combatir los trastornos tróficos y álgicos derivados de la inmovilización prolongada, así como vigilar la posible aparición de un síndrome de dolor regional complejo (SDRC); en segundo lugar, estimular la sensibilidad palmar y digital; y tercero, la recuperación completa de los recorridos articulares2. Colocamos una ortesis nocturna (en supinación, extensión y desviación cubital) las dos primeras semanas y luego las retiramos progresivamente. Durante este período antes de cumplir los 3 meses de la cirugía, debemos ser muy estrictos a la hora de prohibir al paciente realizar movimientos que impliquen una compresión axial del carpo: prensión, apoyo palmar y coger peso, dado que esto puede provocar un descenso del hueso grande sobre el semilunar y el escafoides y poner en peligro la reparación. Se han de distinguir tres tipos de trabajo en esta fase:
- 1.
El trabajo musculoaponeurótico, que se basará en el masaje cutáneo y subcutáneo de la mano y la muñeca, así como la asistencia tónica vibratoria para estimular los husos neuromusculares y recrear el movimiento en extensión.
- 2.
El trabajo articular, que se llevará a cabo con movilizaciones activas y autoasitidas en flexión, extensión y pronosupinación de la muñeca. Lo completaremos con maniobras de cierre proximales y distales de la mano y de oposición de Duparc del pulgar.
- 3.
El trabajo muscular se realizará en isométricos suaves del ECRL, el APL y el FCR. Asimismo, se trabajarán las sinergias de la muñeca y los dedos de la mano. En esta fase solemos utilizar como coadyuvante al tratamiento del dolor y la inflamación, electroterapia tipo TENS o magnetoterapia.
- 1.
- -
Fase 3: de fortalecimiento y propiocepción; del tercer mes en adelante. Se supone que hemos logrado los recorridos articulares completos (y si no es así porque ha quedado limitación en la flexión palmar, que es lo más frecuente, se podrán trabajar ya pasivos).
– Protocolo rehabilitador tras cirugía artroscópica del ligamento escafolunar
| Objetivos | Prohibiciones | Ejercicios | |
|---|---|---|---|
| 1a fase de inmovilización estricta: hasta la 6a semana tras la cirugía |
| Evitar los apoyos con esa mano | Ejercicios domiciliarios: movilizaciones activas suaves de los dedos (a excepción del pulgar), el codo, el hombro y la columna cervical |
| 2a fase tras la retirada de la inmovilización de recuperación de recorridos articulares: de la 6a semana hasta el 3er mes |
|
|
|
| 3a fase de fortalecimiento y propiocepción: del 3er mes en adelante |
|
|
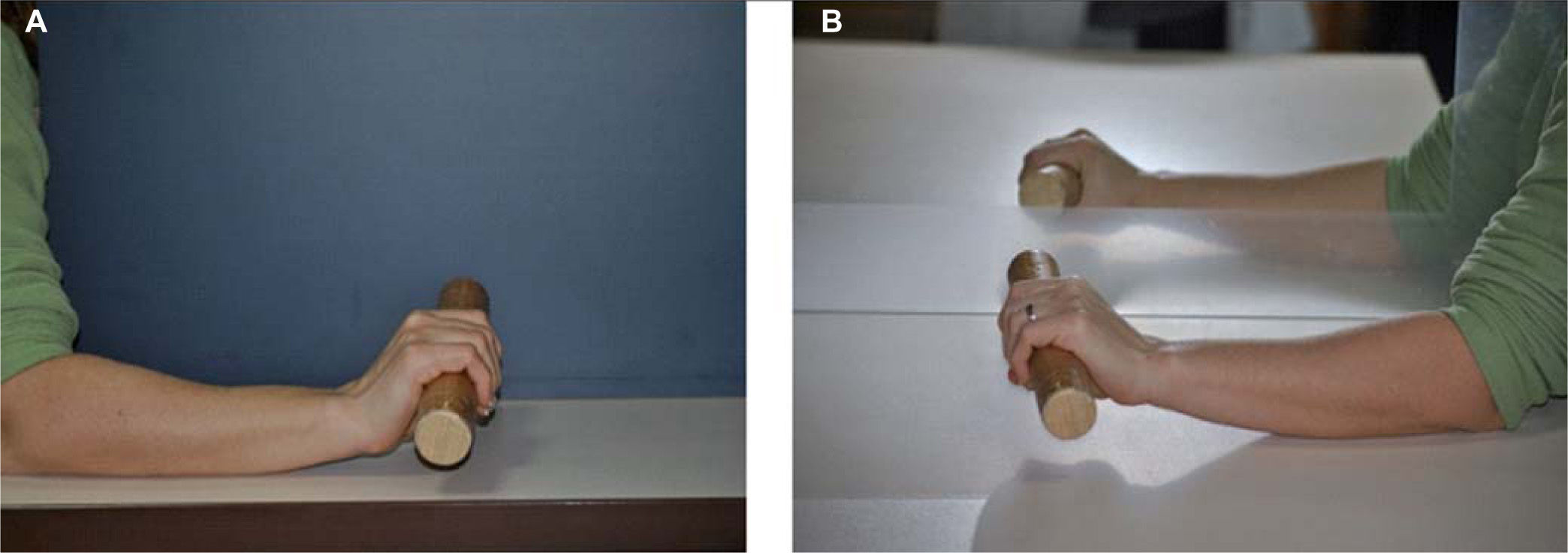
La finalidad esencial en esta etapa es el fortalecimiento (hemos hablado del papel esencial que tiene la musculatura en este tipo de lesiones). Ya se podrán trabajar la prensión isométrica digitopalmar y el fortalecimiento con gomas elásticas de aquellos grupos musculares que nos van a ayudar al incremento de la coaptación del espacio escafolunar: ECRL, APL y FCR (fig. 6). Finalmente se trabajará la reeducación propioceptiva (será la misma que en el tratamiento tras las reparaciones del FCT).
 Extensor carpi radialis longus (ECRL). B) Abductor pollicis longus (APL). C) Flexor carpi radialis (FCR).")
Por tanto, a modo de resumen: se van a contraindicar los ejercicios que impliquen compresión axial del carpo y prensión hasta los 3 meses tras la cirugía debido a que pueden comprometer la reparación por descenso del hueso grande entre el escafoides y el semilunar. Los grupos musculares que se deben potenciar basándonos en los estudios de estabilidad carpianos serán el APL, el ECRL y el FCR, y el trabajo propioceptivo va a ser esencial para la recuperación integral de la estabilidad dinámica de la muñeca.
Protocolo rehabilitador tras cirugía artroscópica de inestabilidad lunopiramidalEn la cirugía artroscópica de las inestabilidades lunopiramidales, el protocolo rehabilitador será el mismo que el de las escafolunares, con la salvedad de que a la hora de introducir el fortalecimiento muscular, trabajaremos los músculos de la vertiente cubital de la muñeca, el ECU y el FCU, ya que se ha demostrado que su trabajo provoca un efecto protector del espacio lunopiramidal14,19.
ConclusionesCada tipo de inestabilidad va a requerir un programa de rehabilitación distinto y específico. La musculatura va a desempeñar un papel esencial en la recuperación funcional de este tipo de lesiones, pues estabilizan el carpo si fallan los estabilizadores primarios. Tras las reparaciones del FCT trabajaremos los músculos estabilizadores de la ARDC; en las inestabilidades escafolunares, los músculos de la vertiente radial de la muñeca; y en las lunopiramidales, los de la vertiente cubital. En todos los casos deberemos trabajar la propiocepción para la recuperación integral de la estabilidad dinámica de la muñeca.
Conflicto de interesesLos autores declaran no tener conflicto de intereses.

