


Artículo
Fases de la marcha humana
Human walking phases
A. Martín Nogueras1. Socio AEF n.° 7.217
J. L. Calvo Arenillas2.
J. Orejuela Rodríguez3. Socio AEF n.° 4.032
F. J. Barbero Iglesias4. Socio AEF n.° 5.340
C. Sánchez Sánchez5. Socio AEF n.° 6.172
1 Fisioterapeuta. Ayudante de Escuela Universitaria.
2 Médico rehabilitador. Profesor titular de Escuela Universitaria.
3 Fisioterapeuta. Profesor de Escuela Universitaria.
4 Fisioterapeuta. Profesor titular interino de Escuela Universitaria.
5 Fisioterapeuta. Becaria. Área de Fisioterapia.
Departamento de Física, Ingeniería y Radiología Médica.Universidad de Salamanca.
Correspondencia:
Ana M.a Martín Nogueras
E. U. de Enfermería y Fisioterapia
Campus Miguel de Unamuno
Avda. del Campo Charro, s/n.
37007 Salamanca
RESUMEN
Es importante para los fisioterapeutas conocer el patrón de marcha normal a fin de conocer el modelo a seguir en la recuperación funcional de todos aquellos pacientes que a causa de su patología lo han perdido o lo presentan alterado.
Tras la recopilación bibliográfica presentamos de forma clara y precisa las consideraciones más relevantes en la descripción del patrón de marcha normal.
PALABRAS CLAVE
Fisioterapia; Marcha humana normal.
ABSTRACT
For the pysical therapy it is very important to take into account the human walking pattern, in order to know the way for the fuctional recuperation in those patients which have alterated the proper pattern.
After consulting the bibliography, the main contents of the human walking pattern are clearly stipulated.
KEY WORDS
Physical therapy; Normal human walking.
INTRODUCCIÓN
Creemos que es de vital importancia en nuestra profesión conocer los patrones normales de movimiento de cada una de las articulaciones del cuerpo humano, los cuales tienen su máxima expresión en las actividades de la vida diaria, entre las que destacan la marcha en la extremidad inferior y la manipulación en la superior.
De ahí surgió la idea de este estudio y de presentar de una forma clara y precisa lo que sería la descripción del patrón de marcha de cara a conocer el modelo a seguir en la recuperación de todos aquellos pacientes que lo han perdido o lo presentan alterado por algún tipo de patología.
La preocupación por el estudio del movimiento es casi tan antigua como la ciencia misma, si bien es a partir del siglo XIX cuando se observa una intensificación en los estudios del mismo y en especial del tema que nos ocupa, la marcha humana.
La mayoría de los antropólogos coinciden en que la característica más antigua que se conoce del hombre no es su inteligencia, ni sus armas, ni su modo de vida, sino que es el caminar erecto. Los primeros sujetos erectos que se conocen datan ya de 4.000.000 de años y fueron hallados en la región de Azar, en Etiopía.
La marcha humana es un proceso de locomoción en el cual el cuerpo humano, en posición erecta generalmente, se mueve hacia delante, siendo su peso soportado alternativamente por ambos miembros inferiores (4). Se caracteriza a la vez que se distingue de la carrera por el contacto permanente del individuo con el suelo a través de al menos uno de sus pies.
Pese al carácter individual de este proceso, que durante los primeros años de la infancia se aprende, las semejanzas entre sujetos distintos son tales que se puede hablar de un patrón característico de marcha humana normal.
En el estudio de la marcha es unánime la idea de que está constituida, groso modo, por cuatro fases, tiempos o, como prefieren llamarlos otros autores, momentos (2, 5, 7, 11).
La forma de analizarla difiere de unos autores a otros en el sentido de que al ser ésta una sucesión de pasos (entendiendo como tales el conjunto de fenómenos producidos entre el apoyo de un talón y el apoyo sucesivo del talón contralateral) cada autor comienza a estudiarla en un momento determinado, unos lo prefieren hacer analizando en primer lugar el despegue del miembro inferior atrasado (2, 11) mientras que otros la inician con el choque del talón del miembro inferior adelantado (5, 7, 8, 13), si bien en todos los casos la analizan en un ciclo completo de uno de los dos miembros inferiores.
Cabría añadir además que normalmente se comienza el estudio partiendo de la posición en las que los dos miembros inferiores están separados como ramas de un compás, uno hacia adelante y otro hacia atrás.
FASES DE LA MARCHA HUMANA
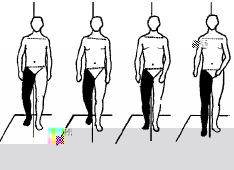
Como ya hemos mencionado, en el estudio de la marcha se distinguen cuatro fases, tiempos o momentos, aunque éstos podrían ser subdivididos como hacen otros autores (6). Describiremos un ciclo completo de uno de los dos miembros inferiores, teniendo en cuenta que en el miembro inferior contralateral acontece lo mismo, pero trasladado en el tiempo medio ciclo (Fig. 1).
Figura 1. Fases de la marcha humana. Plano sagital.
La primera fase, tiempo o momento de la marha humana, también denominada «doble apoyo posterior de impulso» (2), «primer doble apoyo» (11), «fase de despegue» (13) o «fase de empuje hacia arriba o de impulso» (5) (Fig. 1). Con todas estas definiciones podemos hacernos una idea de lo que ocurre en esta fase. Se caracteriza porque el miembro inferior atrasado se inclina hacia delante por una extensión de cadera, la rodilla se flexiona mientras que la articulación tibiotarsiana se flexiona plantarmente. Hacia el final de esta fase el músculo cuádriceps se contrae, extendiendo prácticamente la rodilla, mientras la articulación tibiotarsiana está en máxima flexión plantar.
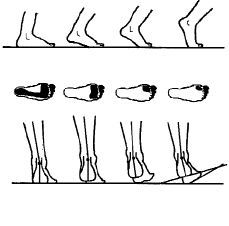
A nivel de pie se produce una flexión plantar lenta de unos 30° llevada a cabo por el músculo tríceps sural como consecuencia de lo cual asistimos a una reducción progresiva del apoyo de la planta del pie en el suelo, que pasará de un contacto total al apoyo único de la cabeza del primer metatarsiano, que se mantiene en contacto prolongado con el suelo por la acción del músculo peroneo lateral largo, responsable también de la actitud en valgo que adopta la articulación subastragalina al final de esta fase (Fig. 2).
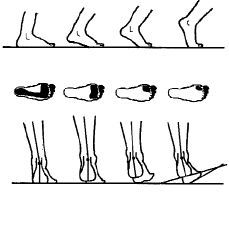
Figura 2. A: Visión lateral. B: Visión posterior. Apoyo del pie durante la primera fase de la marcha humana.
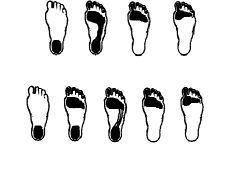
En cuanto al apoyo del pie en el suelo, las teorías actuales (10) difieren algo de las clásicas (1, 2). Según las primeras, el pie se comporta durante el apoyo como si fuese cavo, es decir, que se apoya el talón y el antepié, existiendo un apoyo muy fugaz del borde externo, en oposición a las teorías clásicas que sostenían que en el apoyo total del pie, éste lo hacía con el talón, el borde externo y el antepié (Fig. 3).
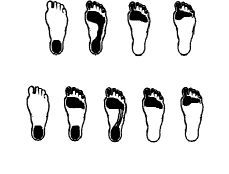
Figura 3. Desarrollo del paso. A: Según las teorías clásicas. B: Según las teorías actuales.
El porqué durante esta fase la rodilla se mantiene en una determinada flexión se debe a que es en ella donde la acción de los músculos tríceps sural y glúteo mayor tienen la mayor eficacia posible. Dicha flexión es de unos 135° en la articulación de la rodilla (mantenida por la acción conjunta de los músculos cuádriceps e isquiotibiales (5), correspondiéndose con 45° de inclinación de la tibia, de tal manera que si descompusiéramos la fuerza que el astrágalo aplica sobre el pilón tibial en sus dos componentes, ascensional y traslacional, tendríamos el mayor componente de impulso (traslacional) posible (Fig. 4).
A

Figura 4. Descomposición de la fuerza de impulsión. A: Fuerza con la rodilla en extensión. B: Mayor fuerza de traslación posible.
Junto al movimiento de extensión que tiene lugar a nivel de la cadera se suceden ligeros movimientos de dicha articulación en los planos frontal y transversal, pasando durante esta fase la pelvis de una rotación máxima (4°) a una actitud neutra (2).
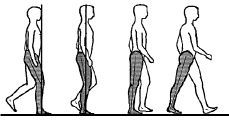
Respecto al movimiento que el tronco experimenta durante esta fase, que al igual que sucederá en las restantes, se asiste a una rotación inversa a la de la pelvis en el plano transversal y a una inclinación inversa en el plano frontal por la sinergia que se establece con los músculos abdominales y espinales del lado contrario (2, 9, 12) (Fig. 5).
Figura 5. Fases de la marcha humana. Plano horizontal.
La segunda fase, tiempo o momento de la marcha, denominada por otros autores «período oscilante o de elevación» (2), «primer apoyo unilateral» (11), «fase de oscilación» (13) o «fase de aceleración del balanceo de la pierna» (5). En ella, el pie que en la fase anterior sólo apoyaba con el dedo gordo se despega del suelo, la rodilla y la cadera se flexionan y todo el miembro inferior se desplaza en el plano sagital, adelantándose al resto del cuerpo, siendo el miembro inferior contralateral el que sostiene la totalidad del peso corporal (Fig. 1).
En esta fase es cuando el miembro inferior alcanza su mínima longitud al producirse la flexión conjugada de cadera, rodilla y flexión dorsal del tobillo, que serán tanto mayores cuanto más accidentado sea el terreno y la longitud del paso para evitar el choque del pie contra el suelo.
El pie, que al final de la fase anterior se encontraba en máxima flexión plantar, eleva su punta por la contracción de los músculos tibiales, peroneos y extensores de los dedos. Durante el paso del miembro inferior bajo el cuerpo dicho grupo muscular es inactivo, y aunque numerosos artículos indican entonces una ligera actividad, otros confirman mediante la electromiografía su relajación.
A nivel de la rodilla se asiste a una flexión de la misma al inicio de esta fase que se mantiene durante el paso del miembro inferior bajo el cuerpo para comenzar a extenderse hacia el final de esta fase.
La cadera pasa durante esta fase de la extensión a la flexión, existiendo ligeras controversias entre los diferentes autores de qué músculos llevan a cabo esta acción (2, 7, 11). En el plano frontal y a nivel de esta última articulación cabe destacar un ligero descenso de la espina ilíaca del miembro oscilante, con la consiguiente inclinación inversa de las líneas pélvica y escapular, de tal manera que al inicio de esta fase el centro de gravedad se traslada al lado sustentador para producirse al final de la misma un reequilibrio de dichas líneas y una centralización del centro de gravedad sobre la línea de progresión (Fig. 6). Asimismo, la pelvis continúa su giro en la misma dirección y pasará de la actitud trasversa conseguida al final de la fase anterior a una rotación anterior máxima (4°).
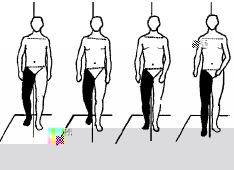
Figura 6. Segunda fase. Plano frontal.
La tercera fase, tiempo o momento de la marcha humana también la podemos encontrar denominada «doble apoyo anterior de recepción o de frenado» (2), «segundo doble apoyo» (11), «fase de recepción de la carga» (13) o «fase de impacto del talón» (5). Se caracteriza porque el miembro inferior oscilante que enla segunda fase cruzaba al contrario toca el suelo por medio del talón, recibiendo parte del peso del cuerpo. Durante esta fase el miembro inferior ha de medir, frenar y regular la progresión hacia delante (Fig. 1).
El pie que toma contacto con el suelo, que lo hace con el tobillo a 0° de flexión y una ligera actitud en varo, se mantiene elevado por la acción de los músculos anteriores, absorbiendo primeramente el choque de recepción y frenando la caída del antepié. Posteriormente se observa una flexión plantar rápida llevada a cabo por el músculo tríceps sural (2), que toma control de frenado y sitúa toda la planta en contacto con el suelo. Por tanto, el apoyo del pie no es algo «pasivo», el pie no «choca» contra el suelo por la sola acción del peso.
En la rodilla, que en el momento del contacto del talón con el suelo se encuentra prácticamente en extensión completa (5°), se produce una ligera flexión amortiguadora de unos 10-20° que vendrá limitada, frenada y dirigida por el músculo cuádriceps (7), al cual se le une la acción estabilizadora de los músculos isquiotibiales, que contrarrestan la tensión de valginización de la rodila en el momento de contacto con el suelo (7).
Los movimientos a nivel de la cadera durante esta fase son menos evidentes; en el plano sagital prácticamente se mantiene la flexión conseguida durante la fase anterior; en el plano horizontal asistimos a un empuje separador responsable de la anchura del paso durante la marcha compensado por una rotación de la pelvis hacia una actitud trasversa (Fig. 5).
La cuarta fase, tiempo o momento de la marcha también aparece denominada como «apoyo unilateral» (2), «segundo apoyo unilateral» (11), «fase media de apoyo» (13) o «fase de postura intermedia» (5). Durante esta fase el miembro inferior apoyado soporta todo el peso del cuerpo a la vez que mantiene el equilibrio en los tres planos y permite la traslación corporal hacia delante (Fig. 1).
En este apoyo unilateral (el miembro inferior contrario se encontraría en la fase de oscilación), el miembro inferior que nos ocupa verticaliza su segmento tibial muy rápidamente mientras que el muslo se mantiene aún en flexión para después enderezarse, que junto a la extensión de rodilla e inclinación anterior de la tibia permiten que todo el miembro inferior se incline hacia delante.
En esta fase de apoyo unilateral se pueden distinguir dos fases determinadas por el momento en que la línea de gravedad cruza la articulación tibiotarsiana, denominada «momento de la vertical», y que sucede justo antes de la extensión de la rodilla (Fig. 7).
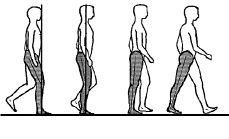
Figura 7. Momento de la vertical.
Durante esta fase se observa una ligera caída de la línea biíliaca hacia el miembro oscilante (contralateral) controlada especialmente por el músculo glúteo mediano (2, 5); dicha inclinación pélvica es compensada (como en fases anteriores) por una oblicuidad inversa de la cintura escapular, siendo la máxima divergencia de ambas líneas (escapular-pélvica) en el momento en que el miembro inferior oscilante (contralateral) cruza la vertical, para restablecerse su paralelismo al final de este apoyo unilateral. Asimismo, y contraria (en tiempo) a esta inclinación, se produce una nueva rotación de la pelvis hacia atrás que se verá compensada por una rotación inversa del tronco (Fig. 5).
CONCLUSIONES
Este patrón de marcha normal se ve modificado en la vida cotidiana por muchas y variadas causas, teniendo en cuenta que no todas ellas tienen por qué ser propiamente patológicas como la talla, la edad, el calzado, el terreno, la carga, la actividad de la persona, etc.
Por otro lado, nos encontramos con que existen muchas afecciones de distinto origen (estructural, osteoarticular, miopático, neuropático, etc.) que llevan a una alteración de alguna parte del ciclo o del ciclo completo de la marcha, siendo nuestra labor la de reconstruirlo de nuevo.
Hemos intentado resumir aquí un tema del que por su extensión y complejidad ha sido objeto de la publicación de numerosos libros; nosotros nos hemos centrado en aquellos aspectos que, de cara a una reconstrucción del patrón de marcha tras una alteración del mismo, consideramos que son los más importantes.
Creemos que es imprescindible para cualquier fisioterapeuta que intente reconstruir un patrón de movimiento, en este caso de la marcha, conocer las bases normales del mismo.
BIBLIOGRAFÍA
1. Arcan M, Brull MA. A fundamental characteristic of de human body and foot, the foot-ground pressure pattern. J Biomecham 1976;9.
2. Ducroquet R, Ducroquet J, Ducroquet P. Marcha normal y patológica. Toray-Masson; 1972.
3. Inman VT. Energy expenditure. Human walking, 62-67. Londres: Williams and Wilkins; 1981.
4. Inman VT, Ralston MJ, Todd F. Human walking. Baltimore: Williams and Wilkins; 1981.
5. Lehmann JF, Lateur B. Análisis de la marcha: diagnóstico y manejo Krusen: medicina física y rehabilitación. Panamericana; 1993. p. 108-26.
6. Perry J. Gait analysis: normal and pathological function. NJ: Slack, Thorofare; 1992.
7. Plas F, Viel E, Blanc Y. La marcha humana. Cinesiología, dinámica, biomecánica y patomecánica. Masson; 1984.
8. Sánchez-La Cuesta J, Prat J, Hoyos JV, Viosca E, Soler-García C, Comin M, La Fuente R, Cortés A, Vera P. Biomecánica de la marcha humana normal y patológica. Instituto de Biomecánica de Valencia; 1993.
9. Sisson G, Perry J, Gronley J, Barnes L. Quantitative thunk muscle activity during ambulation in normal subjects. Trans Orthop Res Soc 1985;359:10.
10. Viladot A. Patología del antepié, 3.a ed. Barcelona: Toray; 1984.
11. Viladot Perice A, Viladot Voegeli A. La marcha humana. Revista de Ortopedia y Traumatología 1990;34IB(1):99-108.
12. Waters RL, Morris J. Electrical activity of muscles of the trunk during wakling. J Anat 1972;111(2):191-9.
13. Winter DA. The biomechanics and motor control of human gait: normal, enderly and pathological, 2.a ed. Waterloo, Ontario: University of Waterloo Press; 1991.