





O conhecimento da cinemática da coluna cervical é uma ferramenta muito importante, dado que esta região é uma das estruturas mais complexas do esqueleto humano e porque a incidência de incapacidade que pode resultar de traumas ou doenças degenerativas é relativamente elevada. O principal objetivo deste estudo consiste na análise e comparação da fusão cervical anterior e/ou fusão cervical posterior como possíveis tratamentos para uma fratura do tipo C2.2, segundo a classificação da AO spine injury classification system, sendo que este estudo poderá auxiliar os profissionais de saúde na escolha do melhor método de fusão. Para o efeito, foi construído um modelo 3D de elementos finitos do segmento cervical C4‐C5‐C6. Foram modelados os respetivos discos intervertebrais (IV) e os seus componentes, nomeadamente o núcleo pulposo, o anel fibroso, as fibras lamelares e as placas cartilaginosas. Os 6 conjuntos de ligamentos (longitudinais anteriores, longitudinais posteriores, interespinhosos, supraespinhosos, amarelos e capsulares) foram também modelados, assim como as articulações intervertebrais.
A simulação de uma fratura foi realizada em 3 passos distintos: introdução de uma fratura na zona anterior da vértebra C5, o comprometimento (rompimento) dos ligamentos da região posterior e o deslizamento da vértebra C5. A instrumentação utilizada nos tratamentos em estudo e ainda a substituição dos discos lesados por um enxerto ósseo proveniente do ilíaco foram também modeladas.
Com este estudo, concluiu‐se que a fusão cervical anterior e posterior apresenta melhores resultados em comparação com os outros tipos de fusão cervical estudados em termos de deslocamento da unidade funcional.
The knowledge of the kinematics of the cervical spine is a very important tool, since this region is one of the more complex structures of the human skeleton and because the incidence of failure that may result from trauma or degenerative diseases is relatively high. The main objective of this study is the analysis and comparison of anterior cervical fusion and/or posterior cervical fusion as possible treatments for a fracture of type C2.2 according to AO spine injury classification system, and this study may assist health professionals in choosing the best fusion technique. To this end we built a 3D finite element model of the cervical segment C4‐C5‐C6. Their intervertebral discs (IV) and its components, namely the nucleus pulposus, the annulus fibrosus, the fibers and the lamellar cartilaginous plates were modeled. Six sets of ligaments (anterior longitudinal, posterior longitudinal, interspinous, suprespinous, yellow and capsular) and the facet joints were also modeled.
The simulation of the fracture was performed in 3 different steps: introduction of a fracture zone in the previous C5 vertebra, rupture of the ligaments of the posterior region and the sliding of the C5 vertebra. The instrumentation used in the study treatments and even the replacement of the damaged disc by bone graft from the iliac bone, were also modeled.
Analyzing the displacements of the functional unit it was concluded that the anterior and posterior cervical fusion provides the best results compared to other types of cervical fusion studied in terms of displacement of the functional unit.
A coluna cervical todos os dias é sujeita a movimentos repetidos e à ação de diferentes cargas, quer por forças musculares quer pela gravidade. Desta forma, é importante o conhecimento pormenorizado da coluna cervical, a fim de compreender a transferência das cargas através dos discos IV, dos ligamentos e das articulações intervertebrais. Este conhecimento facilita o diagnóstico e o tratamento, o desenvolvimento e a evolução de implantes cervicais, e permite a análise dos movimentos da coluna, de forma a evitar intervenções cirúrgicas [1]. Apesar de já existirem algumas técnicas de imagem que ajudam a adquirir mais conhecimento sobre a coluna, nomeadamente a tomografia computorizada (TC) e a ressonância magnética (RM), estas não permitem determinar o estado de tensão nem prever o comportamento da coluna. Assim, surgiu a necessidade de se efetuarem estudos através de análises numéricas, por exemplo com o recurso a estudos biomecânicos. Estes permitem quantificar a ação e distribuição das forças que atuam sobre a coluna vertebral, os movimentos desta, o estudo de mecanismos de lesão, auxiliam na prevenção e diagnóstico, no apoio à decisão clínica, no desenvolvimento de novas estratégias terapêuticas, na otimização das existentes e no desenvolvimento de novos implantes e instrumentos cirúrgicos. Assim, são um instrumento valioso na compreensão do comportamento dinâmico da coluna vertebral em diversas situações patológicas, como fraturas da coluna cervical [2–4].
No passado, foram criados vários modelos, constituídos por um conjunto de vértebras ligadas pelos discos IV e pelos ligamentos modelados como molas [5–7]; outros modelos mais detalhados na representação da anatomia da coluna apresentam as fibras lamelares que conferem anisotropia ao anel fibroso [8,9]. No entanto, estes tipos de modelo apresentam algumas desvantagens, pelo facto de não ser possível prever com precisão a resposta mecânica dos discos IV, e são limitados pela dependência dos parâmetros do modelo que são difíceis de determinar. Mais recentemente, têm surgido modelos mais realistas para simular o comportamento da coluna vertebral e, alguns deles, para estudar os resultados cirúrgicos da fusão cervical anterior e/ou fusão cervical posterior [10,11].
Neste estudo, numa fase inicial, foi criado um modelo da unidade funcional C5‐C6, o qual foi validado através de resultados experimentais encontrados na literatura [12–14]. Posteriormente, os componentes correspondentes à unidade funcional C4‐C5 foram acrescentados, e a fratura do tipo C2.2 foi modelada. Por último, adicionando a correspondente instrumentação, os modelos relativos à fusão cervical anterior e/ou fusão cervical posterior foram criados. Estes modelos foram sujeitos a 5 diferentes tipos de carga, compressão, extensão, flexão, flexão lateral e rotação axial, tendo‐se analisado o deslocamento da unidade funcional.
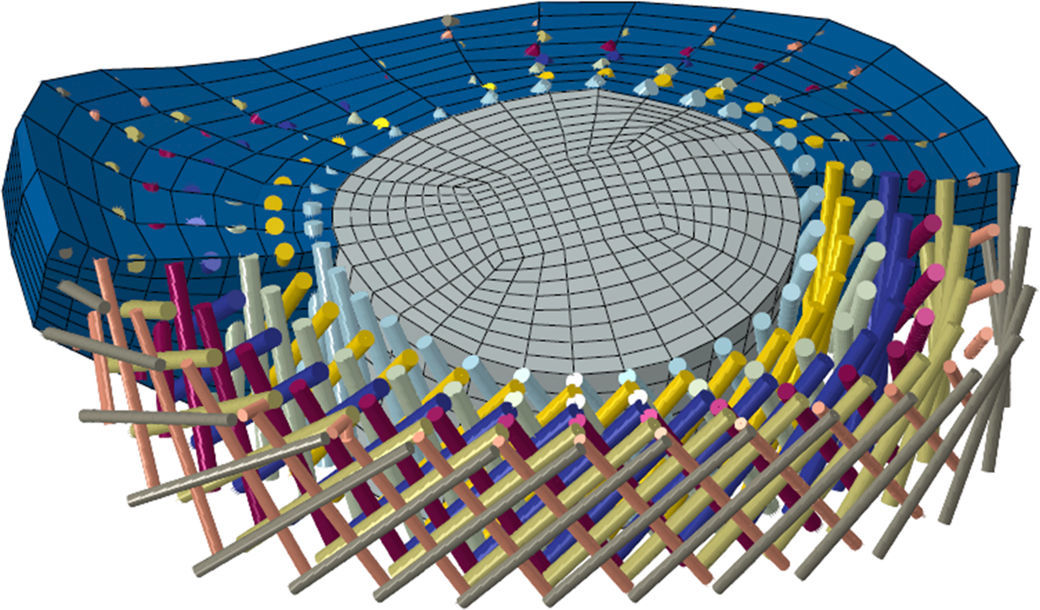
2Materiais e métodos2.1Detalhes do modeloEste trabalho iniciou‐se pela construção de um modelo de elementos finitos (EF) da unidade funcional C4‐C5‐C6. Esta unidade funcional representa um segmento saudável, sem qualquer sinal degenerativo. A geometria das 3 vértebras foi obtida a partir de imagens de TC de uma coluna cervical. Estas geometrias foram suavizadas em algumas regiões, a fim de evitar problemas durante a conceção da malha de EF. Relativamente aos discos IV, estes foram desenvolvidos no espaço intervertebral entre os corpos das vértebras, com a camada radial mais interna denominada de núcleo pulposo e com a camada radial mais externa designada de anel fibroso, reforçado com uma camada de fibras de colagénio. As 2 regiões do disco IV foram criadas tendo em conta que o núcleo pulposo ocupa 30‐50% da área total. As fibras de colagénio foram criadas exibindo um ângulo de 30° entre elas e com direções opostas, como ilustra a figura 1.

Os discos IV são ainda cobertos axialmente pelas placas cartilaginosas. Estas foram desenvolvidas utilizando a primeira e a última camada de elementos dos discos IV.
Todos os ligamentos foram modelados, nomeadamente os longitudinais anteriores (ALL), os longitudinais posteriores (PLL), os amarelos (LF), os interespinhosos (ISL), os supraespinhosos (SSL) e os capsulares (CL). As articulações intervertebrais entre as vértebras também foram consideradas, tendo sido estabelecidos pares de contacto nesta zona. A primeira etapa para a criação das articulações intervertebrais passou pela análise dos locais onde ocorria o contacto entre as vértebras C4 e C5 e entre as vértebras C5 e C6. Após este passo, foram criadas superfícies em cada um destes locais. Estas superfícies foram executadas de forma semelhante à criação do disco, isto é, projetaram‐se alguns pontos quer no lado direito quer do lado esquerdo da vértebra C4; mais tarde, estes foram estruídos até à vértebra C5, tendo assim uma espessura de acordo com o local de encaixe. Este procedimento foi executado da mesma forma para as vértebras C5 e C6. As articulações foram modeladas com elementos híbridos hexaédricos tridimensionais de 8 nós, C3D8H. Para que não ocorra a penetração das vértebras nas articulações intervertebrais, foi necessário criar uma interação do tipo «Surface to surface contact». Este tipo de contacto permite então que as vértebras deslizem sobre as articulações intervertebrais. Assim, foi escolhido um comportamento tangencial nesta interação de contacto das superfícies, onde uma delas funciona como mestre e outra como escrava.
A discretização da geometria foi obtida recorrendo ao software comercial Abaqus®[15]. As vértebras foram discretizadas com uma malha de elementos tetraédricos lineares de 4 nós, C3D4. Para os discos IV, tal como as placas cartilaginosas e as articulações intervertebrais, foram utilizados elementos hexaédricos de 8 nós, C3D8. As fibras de colagénio e os ligamentos foram modelados com elementos de barra, sem resistência à compressão, T3D2.
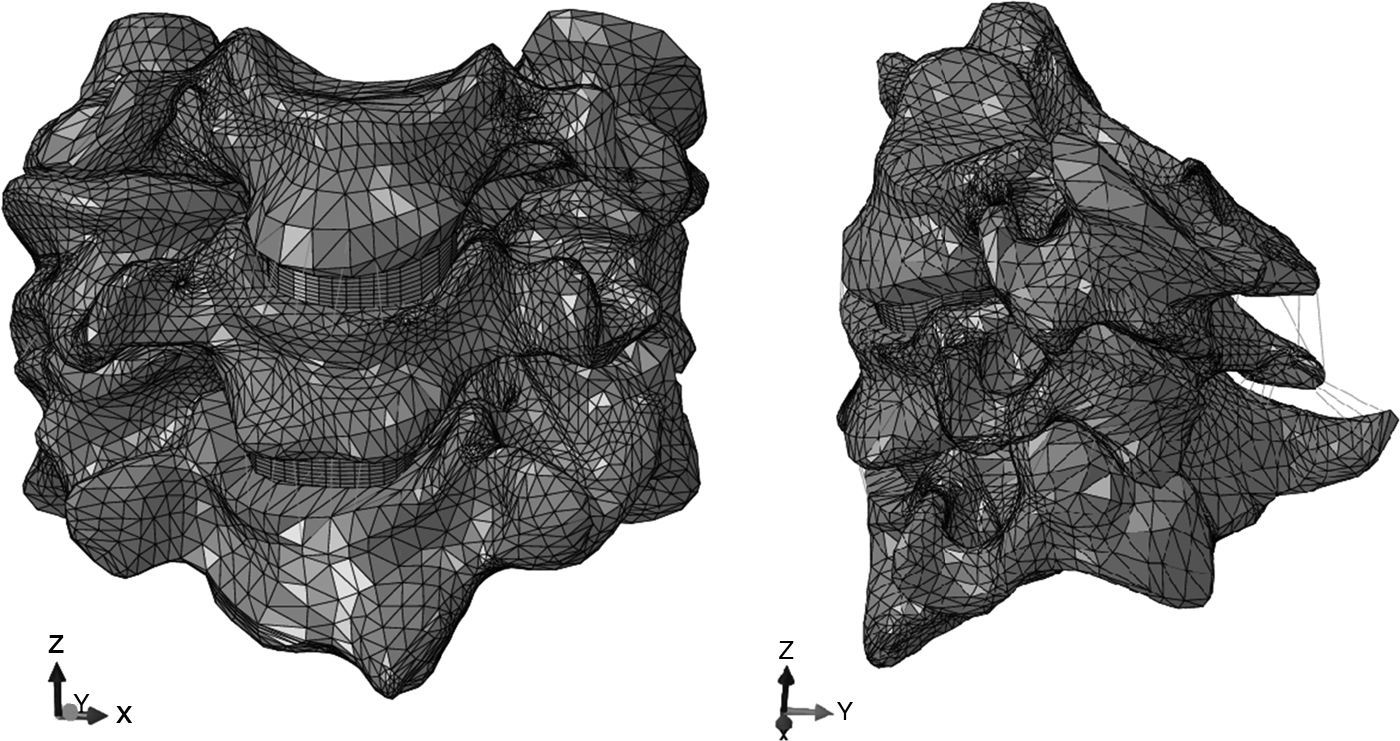
A figura 2 representa o modelo da unidade funcional C4‐C5‐C6 saudável, em 2 perspetivas diferentes.

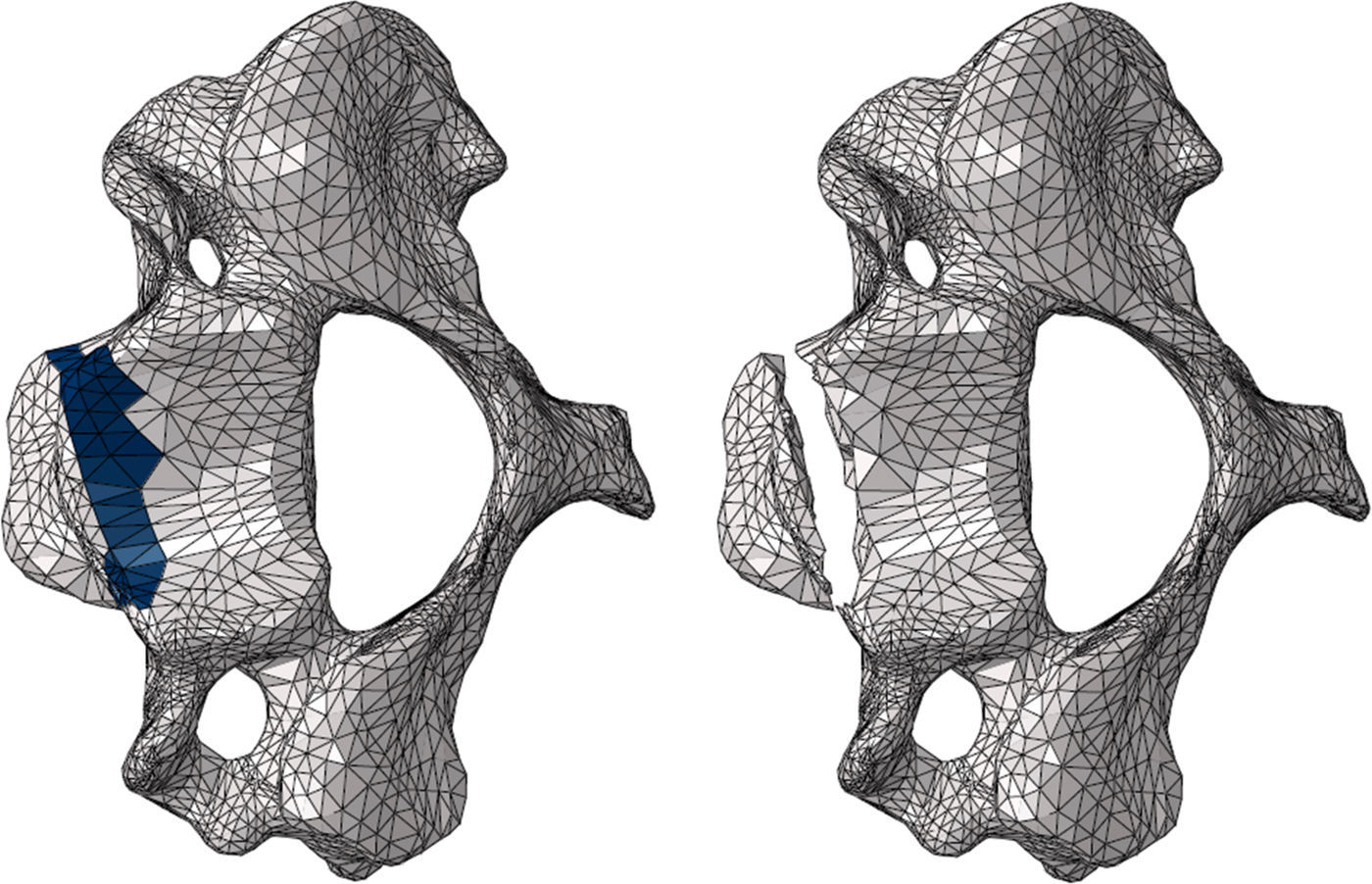
Após a criação do modelo da unidade funcional C4‐C5‐C6 saudável, foi possível obter o modelo patológico. Para o efeito, procedeu‐se à modelação da fratura na zona anterior da vértebra C5, obtida pela diminuição do módulo de Young nesta zona (figura 3), pelo rompimento dos ligamentos posteriores (PLL, ISL, SSL e CL) e pela criação de um deslizamento da vértebra C5 em relação aos restantes corpos vertebrais. Foram realizados vários testes com diferentes valores do módulo de Young para a região da fratura, a fim de se perceber a influência deste parâmetro; o valor adotado para o módulo de Young nesta região foi igual a E=10MPa. Para a realização do deslizamento da vértebra C5, na primeira fase realizou‐se 2 condições de fronteira, onde se limitou o movimento em todos os graus de liberdade nas vértebras C4 e C6 e, numa segunda fase, criou‐se uma superfície que abrangesse todos os nós da vértebra C5, onde mais tarde foi aplicado um deslocamento igual a 2mm segundo o eixo y. Este deslocamento foi aplicado de forma sequencial, para evitar a distorção dos elementos do modelo e também porque as ligações estabelecidas entre as vértebras e os discos IV não permitiam executar este processo de uma só vez. Para simular as técnicas de tratamento, a permuta dos discos lesados por um substituto ósseo proveniente do osso do ilíaco foi modelada.

De forma a simular a fusão cervical anterior e/ou posterior, foi necessário efetuar a modelação da instrumentação necessária para estes tratamentos.
Para a fusão cervical anterior foram modelados os 4 parafusos e uma placa de fixação [16]. A ligação entre o parafuso poliaxial e o osso foi simulada recorrendo à função «Tie» do software Abaqus® que impede o deslocamento relativo. A figura 4 ilustra o parafuso e a figura 5 a placa de fixação.


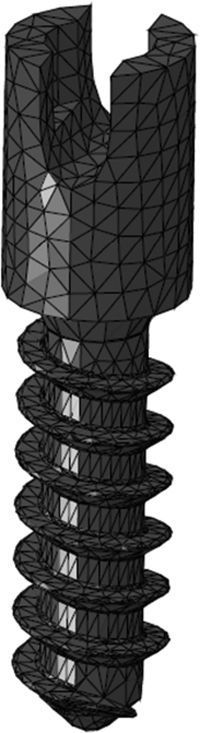
No caso da fusão cervical posterior e apesar de a instrumentação aqui utilizada compreender 3 tipos de componentes, apenas foi desenvolvido o parafuso poliaxial. A barra de retenção foi modelada com 24 elementos do tipo B31 e o parafuso de retenção foi substituído pelo establecimento de condições fronteira obtidas pela utilização da função «MPC Link» no software Abaqus®. A figura 6 apresenta o parafuso poliaxial desenvolvido.

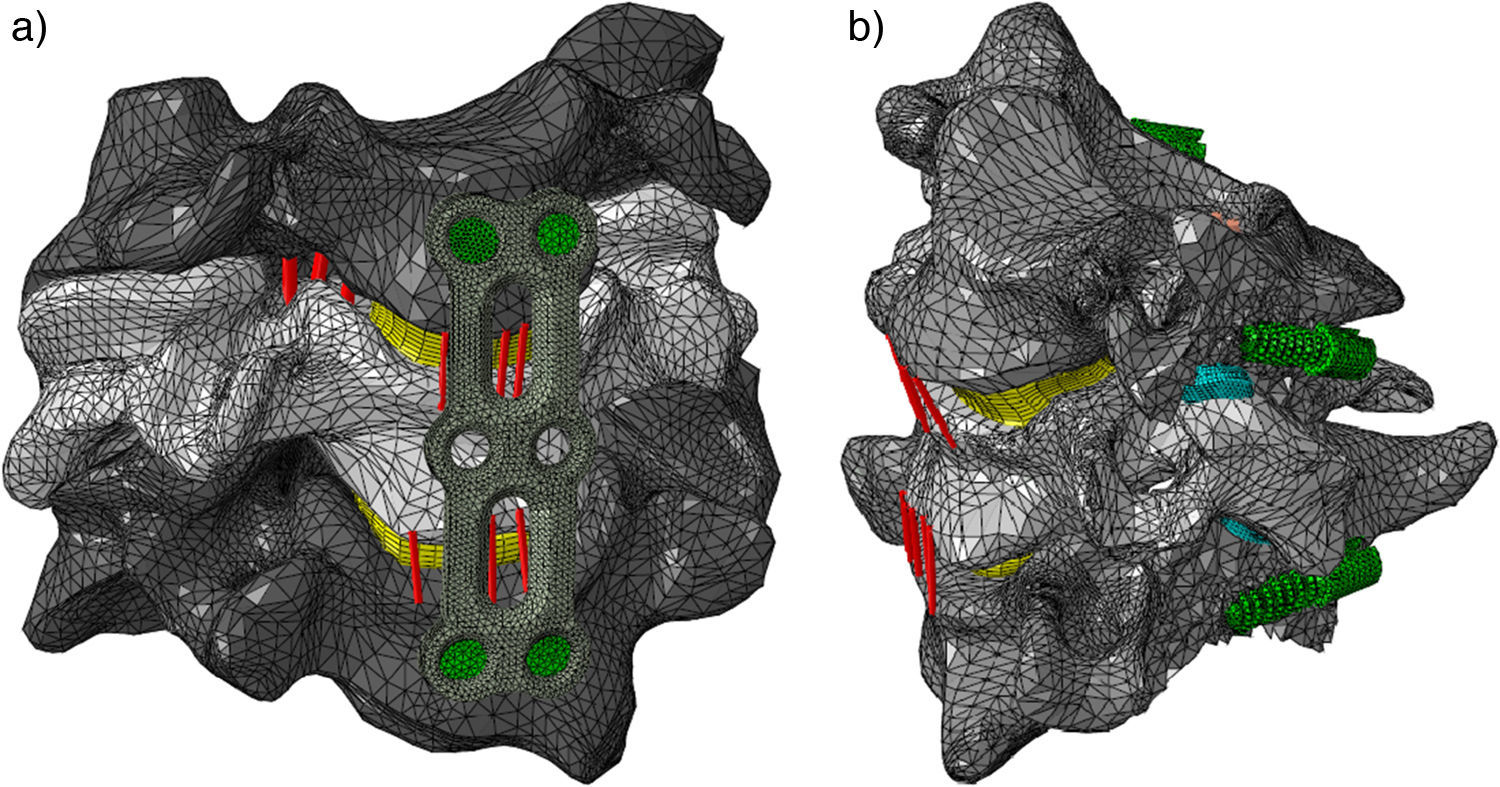
Tendo os componentes do modelo executados, procedeu‐se à montagem destes no modelo de EF da unidade funcional C4‐C5‐C6 patológica, para o caso da fusão cervical anterior (fig. 7a), para o caso da fusão cervical posterior (fig. 7b) e para o caso da fusão cervical anterior e posterior (fig. 7a e 7b).
 Fusão cervical anterior; b) fusão cervical posterior.")
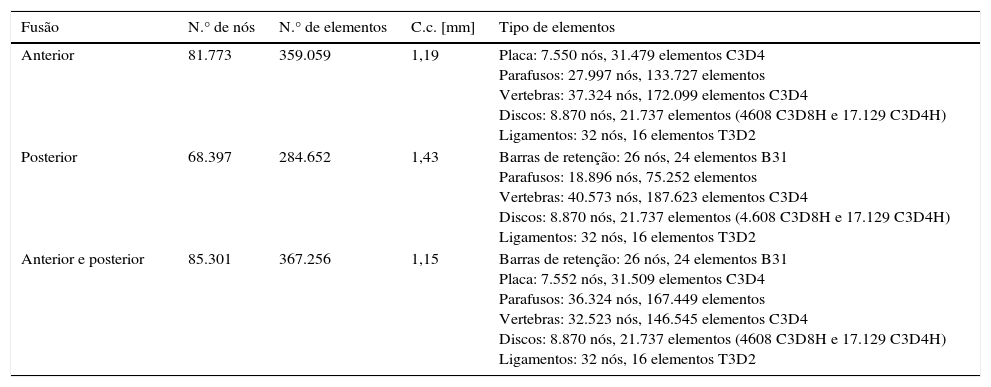
A tabela 1 apresenta as características das malhas de EF, nomeadamente o número de nós e elementos, o comprimento característico (comprimento médio) e o tipo de elementos, correspondentes aos 3 tipos de fusão estudados.
Características das malhas de elementos finitos correspondentes aos 3 tipos de fusão estudados; C.c. representa o comprimento característico da malha
| Fusão | N.° de nós | N.° de elementos | C.c. [mm] | Tipo de elementos |
|---|---|---|---|---|
| Anterior | 81.773 | 359.059 | 1,19 | Placa: 7.550 nós, 31.479 elementos C3D4 Parafusos: 27.997 nós, 133.727 elementos Vertebras: 37.324 nós, 172.099 elementos C3D4 Discos: 8.870 nós, 21.737 elementos (4608 C3D8H e 17.129 C3D4H) Ligamentos: 32 nós, 16 elementos T3D2 |
| Posterior | 68.397 | 284.652 | 1,43 | Barras de retenção: 26 nós, 24 elementos B31 Parafusos: 18.896 nós, 75.252 elementos Vertebras: 40.573 nós, 187.623 elementos C3D4 Discos: 8.870 nós, 21.737 elementos (4.608 C3D8H e 17.129 C3D4H) Ligamentos: 32 nós, 16 elementos T3D2 |
| Anterior e posterior | 85.301 | 367.256 | 1,15 | Barras de retenção: 26 nós, 24 elementos B31 Placa: 7.552 nós, 31.509 elementos C3D4 Parafusos: 36.324 nós, 167.449 elementos Vertebras: 32.523 nós, 146.545 elementos C3D4 Discos: 8.870 nós, 21.737 elementos (4608 C3D8H e 17.129 C3D4H) Ligamentos: 32 nós, 16 elementos T3D2 |
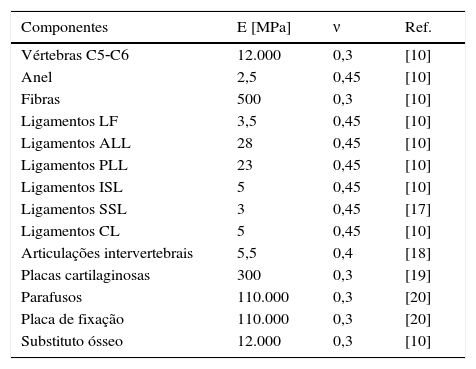
A tabela 2 apresenta as propriedades mecânicas dos diferentes componentes dos modelos em estudo, onde todos os componentes do modelo apresentam um comportamento linear e elástico, à exceção do núcleo pulposo que se considerou como hiperelástico Neo‐Hookean [10,17–21].
Propriedades mecânicas dos componentes do modelo final
| Componentes | E [MPa] | ν | Ref. |
|---|---|---|---|
| Vértebras C5‐C6 | 12.000 | 0,3 | [10] |
| Anel | 2,5 | 0,45 | [10] |
| Fibras | 500 | 0,3 | [10] |
| Ligamentos LF | 3,5 | 0,45 | [10] |
| Ligamentos ALL | 28 | 0,45 | [10] |
| Ligamentos PLL | 23 | 0,45 | [10] |
| Ligamentos ISL | 5 | 0,45 | [10] |
| Ligamentos SSL | 3 | 0,45 | [17] |
| Ligamentos CL | 5 | 0,45 | [10] |
| Articulações intervertebrais | 5,5 | 0,4 | [18] |
| Placas cartilaginosas | 300 | 0,3 | [19] |
| Parafusos | 110.000 | 0,3 | [20] |
| Placa de fixação | 110.000 | 0,3 | [20] |
| Substituto ósseo | 12.000 | 0,3 | [10] |
| Componente | Material | Ref. |
|---|---|---|
| Núcleo pulposo | Neo‐Hookean: C1=0,16MPa D=0,024MPa−1 | [21] |
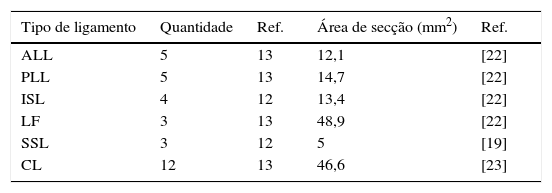
A tabela 3 apresenta a área de secção e número de ligamentos [19,22,23].
2.3Condições fronteiraAs condições fronteiras foram definidas de acordo com a literatura [24,25]. Os nós da superfície inferior do corpo vertebral de C6 foram restringidos em todos os graus de liberdade. Para aplicação das cargas, escolheu‐se um nó de referência na superfície superior da vértebra C5 e os restantes nós dessa superfície foram ligados a esse ponto de referência por acoplamento cinemático.
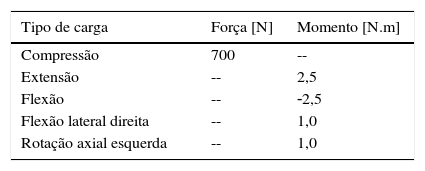
2.4Carregamentos aplicadosOs valores das cargas utilizados nesse estudo e apresentados na tabela 4, foram obtidos na literatura; a simulação do caso de carga de compressão baseou‐se no trabalho de Kumaresen et al. [24], a simulação da extensão e da flexão no trabalho de Wheeldon et al. [2] e os casos de carga de flexão lateral direita e rotação axial esquerda foram efetuados a partir do estudo de Galbusera [10].
3Resultados e discussãoNesta secção é apresentada a validação do modelo saudável, comparando o ângulo de rotação da unidade funcional C5‐C6 com dados encontrados na literatura. Posteriormente, estudou‐se o comportamento mecânico da unidade funcional C4‐C5‐C6 patológica quando sujeita a 3 tipos diferentes de fusão cervical pela análise do deslocamento da unidade C4‐C5‐C6. Todas as simulações numéricas foram efetuadas considerando o comportamento não linear geométrico do material.
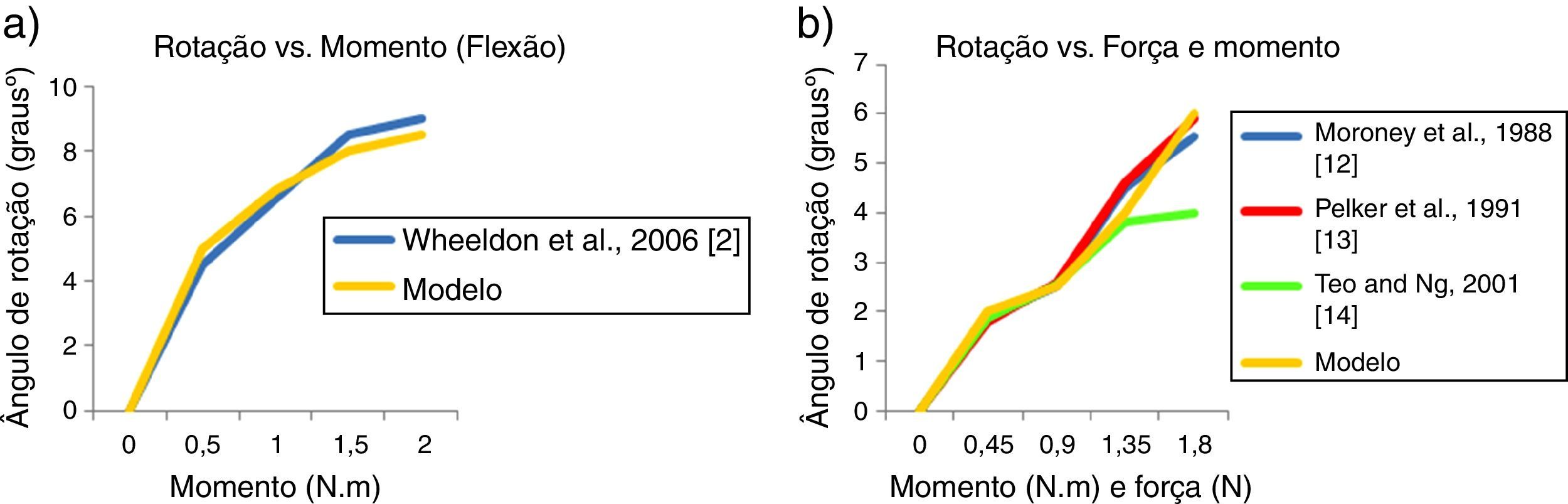
3.1Validação do modeloNum primeiro estudo, analisou‐se a rotação do segmento vertebral C5‐C6 quando sujeito à flexão de ‐0,5N.m, ‐1N.m e ‐2N.m [2]. Por sua vez, num segundo estudo, analisou‐se a rotação deste mesmo segmento quando sujeito a uma força de compressão de 73,6N, conjugada com a flexão de ‐0,45N.m, ‐0,9N.m, ‐1,35N.m e ‐1,8N.m [12–14].
Na figura 8 apresenta 2 gráficos correspondentes aos 2 estudos referidos anteriormente: o ângulo de rotação da unidade funcional C5‐C6 quando sujeita a uma carga de flexão e a uma força de compressão conjugada com uma carga de flexão. Em ambos, foi possível verificar uma boa aproximação entre os valores calculados e os valores experimentais; no segundo estudo, para valores elevados da carga de compressão e flexão, observa‐se um desvio relativamente ao resultado experimental de Teo and Ng [14].
3.2Resultados ângulo de rotação vs. momento (flexão); (b) ângulo de rotação vs. força de compressão e momento (flexão).")
A tabela 5 apresenta o deslocamento máximo (em mm) da unidade funcional C4‐C5‐C6 patológica sob a ação diferentes tipos de carga, para os 3 tipos de fusão considerados.
Deslocamento máximo (mm) da unidade funcional C4‐C5‐C6
| Tipo de carga | |||||
|---|---|---|---|---|---|
| Tipo de fusão | Compressão | Extensão | Flexão | Flexão lateral direita | Rotação axial esquerda |
| Fusão cervical anterior | 0,2097 | 0,8083 | 0,2236 | 0,3151 | 0,3051 |
| Fusão cervical posterior | 1,367 | 0,5871 | 0,8080 | 0,4697 | 0,3911 |
| Fusão cervical anterior e posterior | 0,1299 | 0,2235 | 0,1352 | 0,2732 | 0,1614 |
Analisando a tabela 5, verifica‐se para todos os casos de carga é a fusão cervical anterior e posterior que apresenta valores de deslocamento mais reduzidos, como era de esperar, dado que estamos presentes uma dupla fusão. No caso da compressão e da flexão, observa‐se que o menor deslocamento ocorre na fusão cervical anterior, como esperado, visto que estes movimentos envolvem deslocamentos para a região anterior da coluna e, consequentemente, a fixação desta região conduz a valores mais reduzidos.
No caso da extensão, é na fusão anterior que ocorre um maior deslocamento da unidade funcional em estudo. Este resultado pode ser explicado pelo facto de este tipo de carga envolver um movimento no sentido posterior, ou seja, para trás. Assim, com a fixação na região posterior da coluna cervical, este movimento é menor comparativamente com o caso de fixação na região anterior, visto que a instrumentação colocada na região mencionada em primeiro lugar impede que haja este movimento.
No caso da flexão lateral direita e da rotação axial esquerda, é na fusão cervical posterior que se encontram os maiores valores de deslocamento, apesar de a diferença com a fusão cervical anterior ser reduzida.
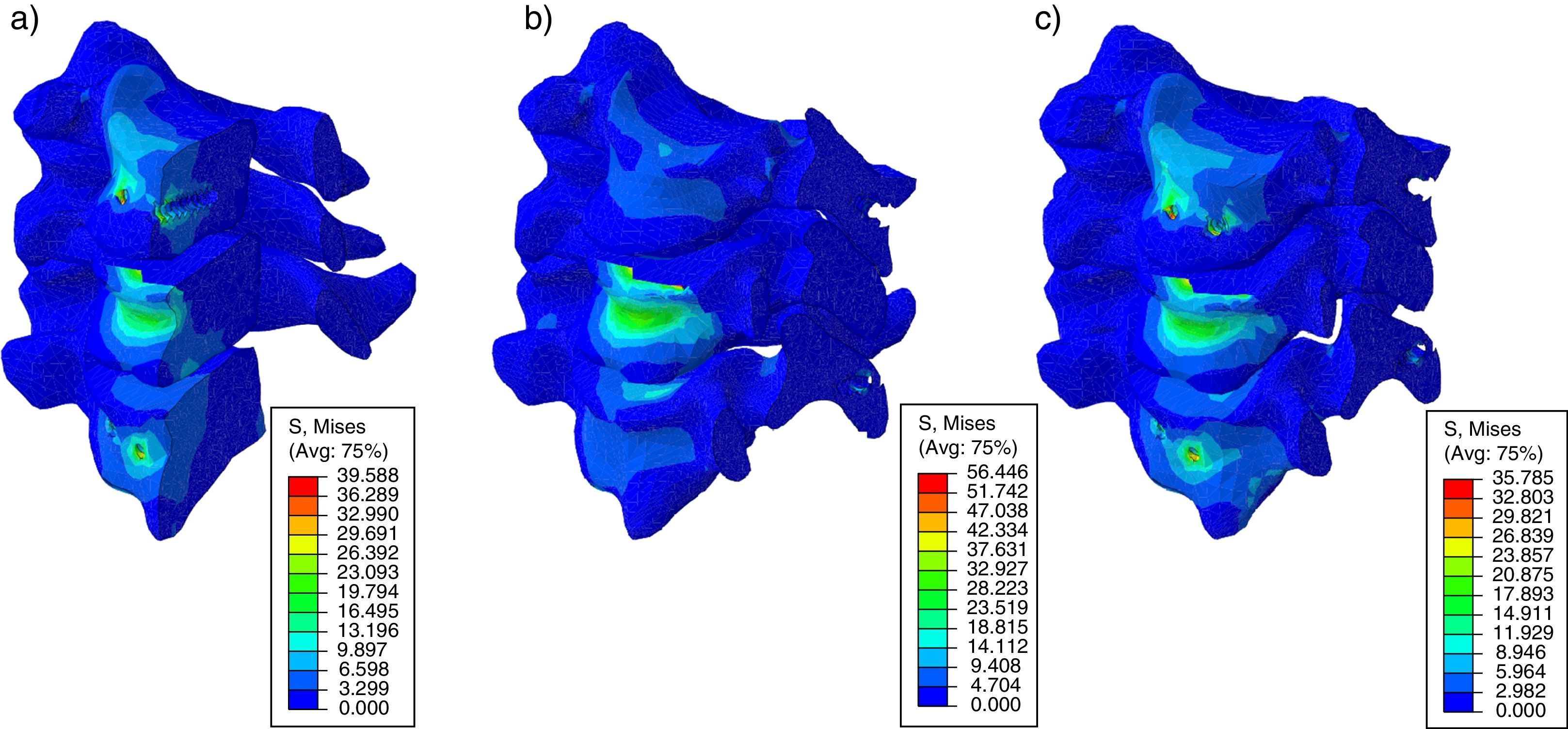
Na figura 9 apresenta‐se a distribuição das tensões de Von Mises para uma carga de flexão, correspondente aos 3 tipos de cirurgia estudados, verificando‐se que o caso da fusão anterior e posterior apresenta tensões mais baixas, com um valor máximo de 35.785MPa; este resultado está de acordo com a conclusão resultante da análise do campo de deslocamentos efetuada.
4Conclusão: a) fusão cervical anterior; b) fusão cervical posterior; c) fusão cervical anterior e posterior.")
Os tratamentos cirúrgicos das fraturas cervicais continuam a ser atualmente um desafio significativo e, como tal, devem ser desenvolvidos esforços que permitam a criação de novas abordagens cirúrgicas e até mesmo a otimização das pré‐existentes. A solução poderá passar pela colaboração de áreas como a bioengenharia e biomecânica, que estão em crescimento exponencial e fornecem um extenso manancial de métodos e modelos de estudo que poderão contribuir para o aperfeiçoamento dos nossos conhecimentos sobre vários aspetos, nomeadamente as deformidades dos diferentes componentes da coluna vertebral e as vantagens e desvantagens do uso de diferentes tipos de tratamentos, aproximando‐nos do objetivo final de tratar melhor com menos complicações. Com este estudo, pode‐se concluir que a fusão cervical anterior e posterior apresenta algumas vantagens relativamente aos restantes tratamentos em estudo. Este estudo pode ser considerado um ponto de partida para a criação de um modelo da coluna cervical total, com a inclusão das unidades funcionais C1‐C3 e C6‐C7 e ainda a inserção dos músculos da coluna cervical, tentando assim perceber a sua influência. Com o modelo completo, seria interessante o estudo de diferentes fraturas e até outro tipo de patologia.
Conflito de interessesOs autores declaram não haver conflito de interesses.
Os autores agradecem o trabalho colaborativo da equipa médica do Centro Hospitalar de Vila Nova de Gaia, um hospital público de Portugal, ao Dr. João Maia Gonçalves e ainda à Biomet, em particular ao Dr. Miguel Gouveia, pelo fornecimento de componentes importantes para a realização deste trabalho.