



¿ INTRODUCCIÓN
La cirugía ha evolucionado y transformado a través de la cirugía laparoscópica. En 1985, Mühe realizó la primera colecistectomía laparoscópica. Desde entonces la técnica laparoscópica fue agregándose al armamento quirúrgico, con cada vez mejor aceptación y expansión de sus fronteras e indicaciones quirúrgicas. Sin embargo, por ser una técnica de acceso mínimo, no está exenta de complicaciones relativas a la curva de aprendizaje y a la experiencia del cirujano en el área laparoscópica y también a la adquisición de nuevas habilidades quirúrgicas específicas de una técnica determinada.
La Sociedad Americana de Cirujanos Endoscopistas y Gastrointestinales (SAGES) y la Asociación Europea para Cirugía Endoscópica (EAES) revisaron las medidas para vencer los problemas derivados de la curva de aprendizaje con procedimientos laparoscópicos.
En 2002, en Estados Unidos fueron requeridos los programas de entrenamiento para implementar recomendaciones en la educación médica y para alcanzar una certificación. Fue entonces cuando se recomendó el uso de simuladores basado en adquisición de habilidades.1
El método tradicional de aprendizaje de habilidades técnicas en cirugía se basa en el principio de Halsted ("mirar, hacer y enseñar"), útil en procedimientos en cirugía abierta, que es aplicable cuando el aprendiz puede observar los instrumentos y las manos del cirujano y los resultados de su manipulación directa. En cambio, la cirugía laparoscópica requiere habilidades y técnicas especiales que difieren en forma significativa de las requeridas en cirugía abierta, por ejemplo, orientación espacial, trabajo con instrumentos largos que reducen la retroalimentación háptica, manipulación ambiental en tercera dimensión de una pantalla en dos dimensiones y el efecto de punto de acomodación y calidad de imagen.
Semm fue el primero en establecer en la década de 1980 el "Pelvi-trainer" como un modelo para cirugía ginecológica en la pelvis. En urología, con la introducción de la nefrectomía laparoscópica, el Pelvi-trainer también representó un paso esencial, pero resultó más importante con el advenimiento de la prostatectomía radical laparoscópica.
La técnica requiere el uso de instrumentos largos que amplifican el temblor natural y que requieren un control más fino que el utilizado en los instrumentos convencionales. Otro problema es la visión en dos dimensiones que provee la cámara, la ausencia de sombras, estereovisión y diferencia de movimiento al observarlo desde otro ángulo de orientación, todo lo cual hace difícil al cirujano determinar la distancia espacial y realizar movimientos precisos. Del mismo modo, dificulta la coordinación ojo-mano, en particular en cirugía reconstructiva urológica (pieloplastias, anastomosis uretrovesical, reimplantes, etc.).2
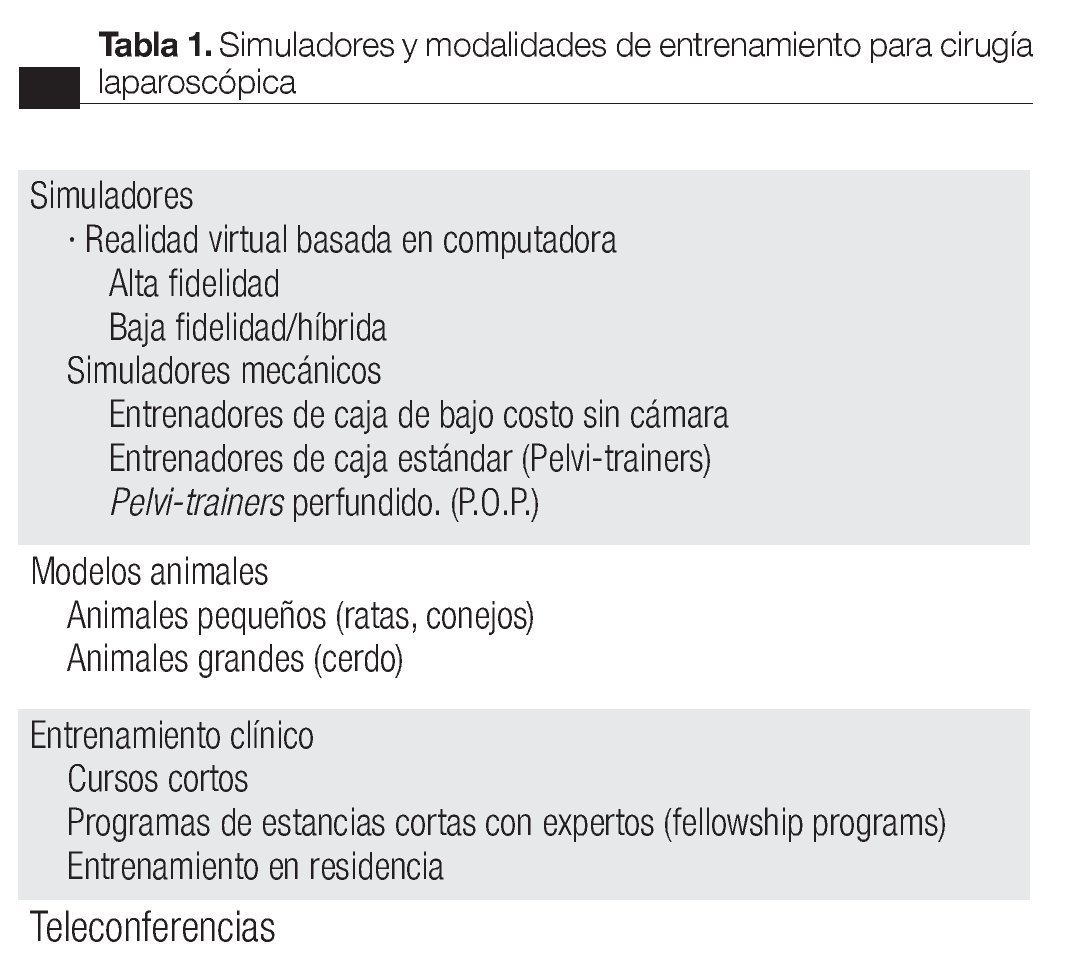
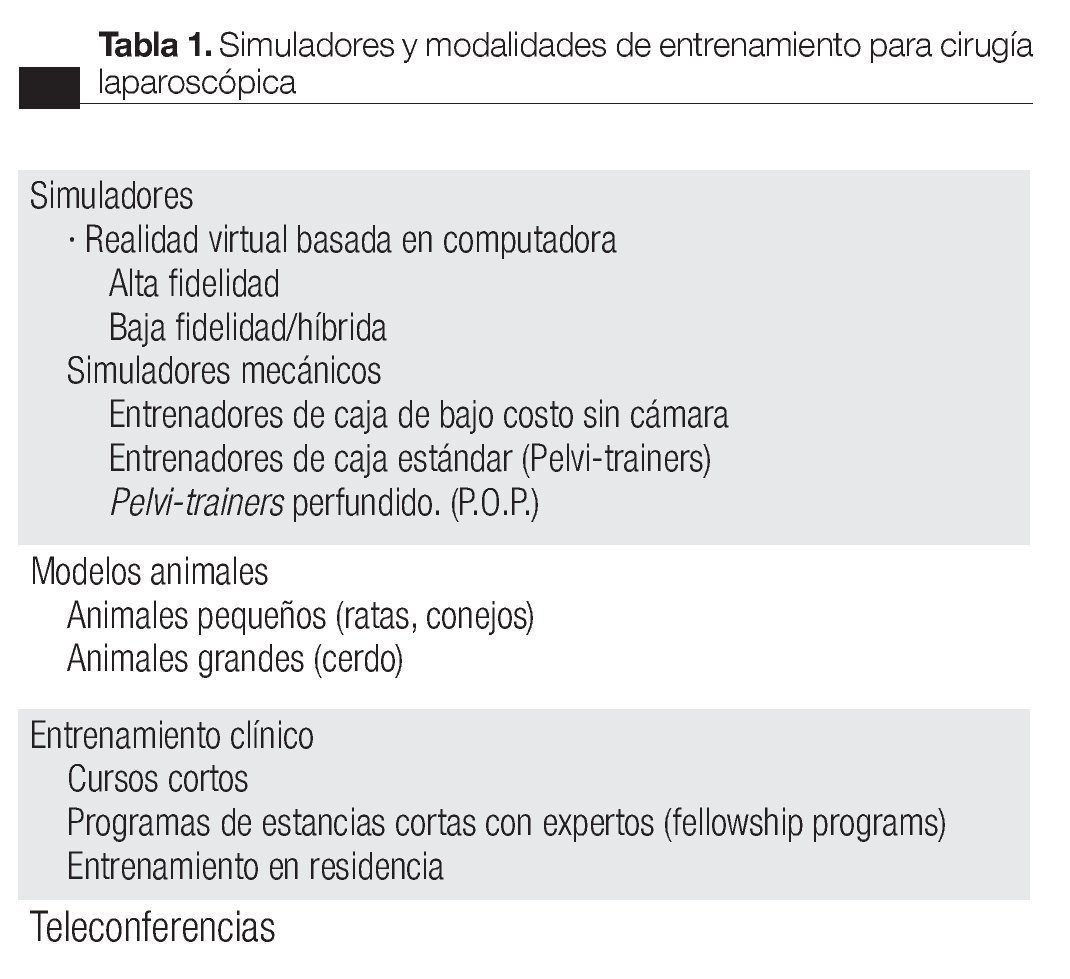
Existe una diversidad de modalidades para entrenamiento en cirugía laparoscópica (Tabla 1). Los simuladores pueden dividirse en tres grupos: mecánicos, híbridos o de realidad virtual.2
Simulador mecánico. Es básicamente una caja que semeja el abdomen a través de la cual se introducen los instrumentos laparoscópicos. Los instrumentos del entrenamiento son similares a los utilizados durante una intervención laparoscópico en la sala quirúrgica.2,3Pueden realizarse numerosos ejercicios que van desde la manipulación de pequeños objetos hasta practicar complejas suturas o anastomosis intracorpóreas.
Simuladores híbridos. Son aquéllos en los que se emplean tejidos orgánicos en modelos mecánicos, de manera que estructuras orgánicas de cadáver animal pueden ser sujetas a manipulación quirúrgica en el interior de simuladores mecánicos. Asimismo, se incluyen también aquéllos en los que se utilizan bombas para semejar la pulsación de los vasos arteriales.
Simuladores virtuales. El término realidad virtual fue acuñado por Jaron Lanier, quien fundó la primer empresa comercial respectiva en la década de 1980 (VPL Research). Se define como la interfaz computadora-humano que simula un ambiente digital en tercera dimensión que permite la interacción con el participante.
Modelos animales. Debido a la similitud anatómica, el modelo porcino es el más utilizado para entrenamiento de procedimientos laparoscópicos en urología. Han sido usados para procedimientos del riñón (pieloplastias, nefrectomía radical o parcial), próstata, vasos mayores y vejiga. En el modelo animal se pueden utilizar los diversos recursos para corte y clipaje.4
Los entrenadores mecánicos tienen múltiples ventajas sobre otras modalidades de entrenamiento: son prácticos, portátiles, reusables, económicos, ofrecen la oportunidad de entrenar con los mismos instrumentos usados en la sala quirúrgica, entre otros, y con dimensiones semejantes al modelo real in vivo.2
El objetivo del entrenamiento fuera de la sala quirúrgica es minimizar los accidentes e incrementar la seguridad al evitar errores. En la adquisición de habilidades técnicas en un escenario de entrenamiento se estimulan múltiples presiones, como poco tiempo de contacto con el instrumental laparoscópico, costo elevado para el entrenamiento en la sala quirúrgica por la disponibilidad del equipo especializado, errores médicos con su implicación legal y ética en cuanto a la adquisición de habilidades en el aprendizaje directo en el paciente.
En respuesta a esas demandas, los simuladores laparoscópicos han sido desarrollados con menor precio comparado con otras modalidades de entrenamiento que facilitan la transferencia de habilidades a la sala de operaciones en un ambiente relajado.5 Los modelos de entrenamiento se enfocan en diversas habilidades, como la técnica de sutura endoscópica, incluidos los aspectos geométricos.
En el presente trabajo se describe un modelo inanimado para entrenamiento en cirugía laparoscópica en urología.
¿ MATERIALES Y MÉTODOS
Se desarrolló un simulador inanimado mecánico basado en las condiciones normales del quirófano, una cavidad semicilíndrica que simula la cavidad abdominal con neumoperitoneo que dispone de seis puertos de entrada para los instrumentos laparoscópicos con una separación de 5 a 7 cm entre cada uno de ellos, lo que permite la disposición para usar el principio de triangulación (Imágenes 1 y 2).

Imagen 1. Simulador inanimado mecánico basado en las condiciones normales del quirófano, una cavidad semicilíndrica que simula la cavidad abdominal con neumoperitoneo, con seis puertos de entrada.

Imagen 2. Simulador inanimado mecánico con seis puertos de entrada para los instrumentos laparoscópicos, con una separación de 5 a 7 cm entre cada uno de ellos.
El modelo cuenta con un sistema de iluminación de luz blanca fluorescente disponible en el comercio de 8 vatios, el cual se colocó de manera tal que la iluminación fuera uniforme en toda la cavidad. El sistema de imagen por cámara se introduce por uno de los puertos y tiene la capacidad de autoajustarse a la posición deseada gracias a un dispositivo mecánico integrado que permite el movimiento en todas direcciones (rotación, adelante-atrás, arriba-abajo, derecha-izquierda). Este mecanismo reemplaza al laparoscopio convencional, ya que se manipula en forma manual desde fuera del entrenador sin necesidad de utilizar una segunda persona para su manipulación. El sistema de imagen consiste en una minivideocámara de 32 x 32 mm con lente de 3.7 mm, resolución de 480 líneas y conector RCA tipo plug and play compatible con los televisores convencionales y la mayoría de los proyectores. Esta característica lo vuelve disponible para el autoaprendizaje en el hogar o la enseñanza en el salón de clases o auditorios, ya que suministra una excelente calidad de imagen y permite una visión natural de 0 a 30 grados. El simulador inanimado mecánico cuenta con un sistema de sonido que consiste en dos bocinas integradas a ambos lados del simulador que permite conectar un sistema de reproducción de sonido con control de volumen integrado, entrada para audífonos, conector universal de 3.5 mm estéreo, potencia 110 W pmpo, frecuencia de respuesta de 50 Hz a 18 kHz, para hacer más agradable el ambiente durante el entrenamiento de las diversas habilidades que el simulador provee. Cuenta con una regleta graduada en 10 centímetros para medir con facilidad la longitud de las suturas para el entrenamiento de nudos intracorpóreos y un cronómetro digital disponible en el comercio para poder contabilizar el tiempo requerido de los ejercicios y registrar los avances en el desarrollo de las habilidades.
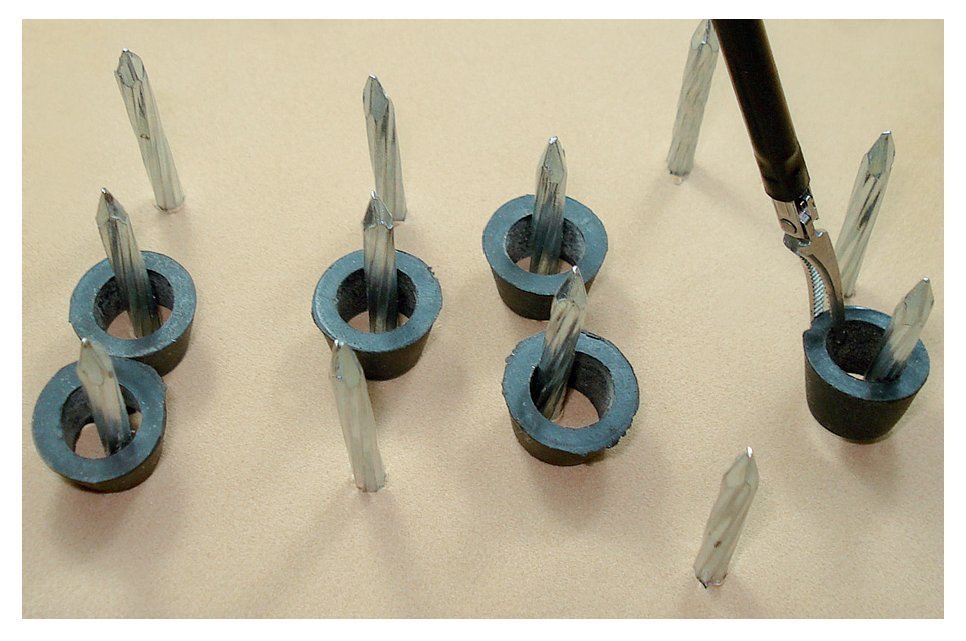
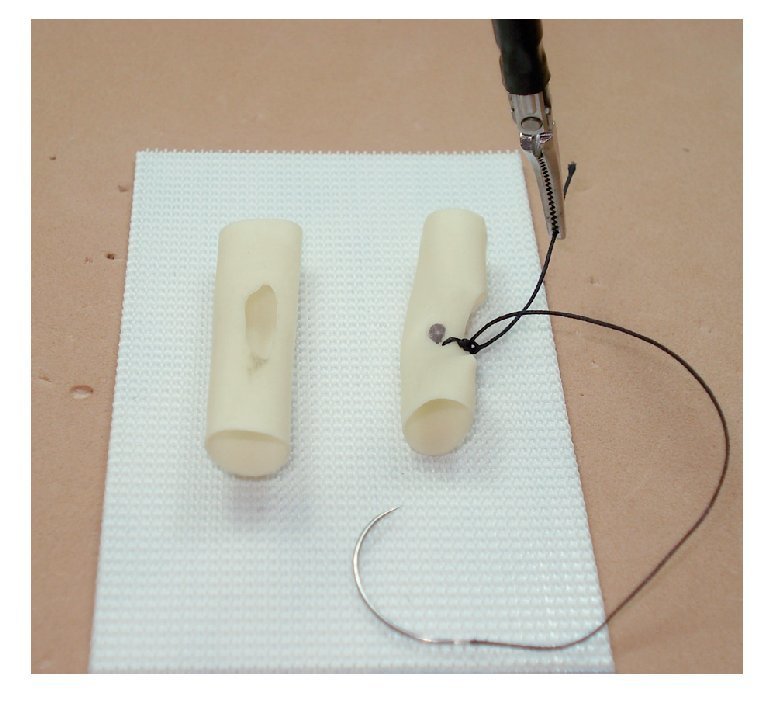
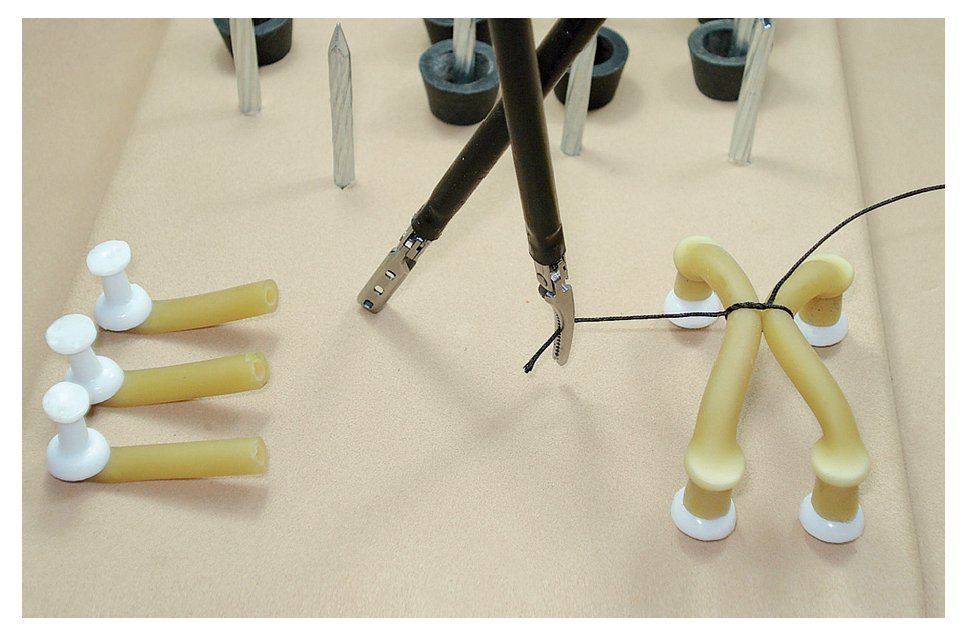
El simulador está diseñado para realizar las diversas habilidades descritas en "The McGill Inanimate System for Training and Evaluation of Laparoscopic Skills" (MISTELS), programa validado y ampliamente utilizado en el mundo para la adquisición de las habilidades requeridas en cirugía laparoscópica (Imágenes 3 y 4).5-7
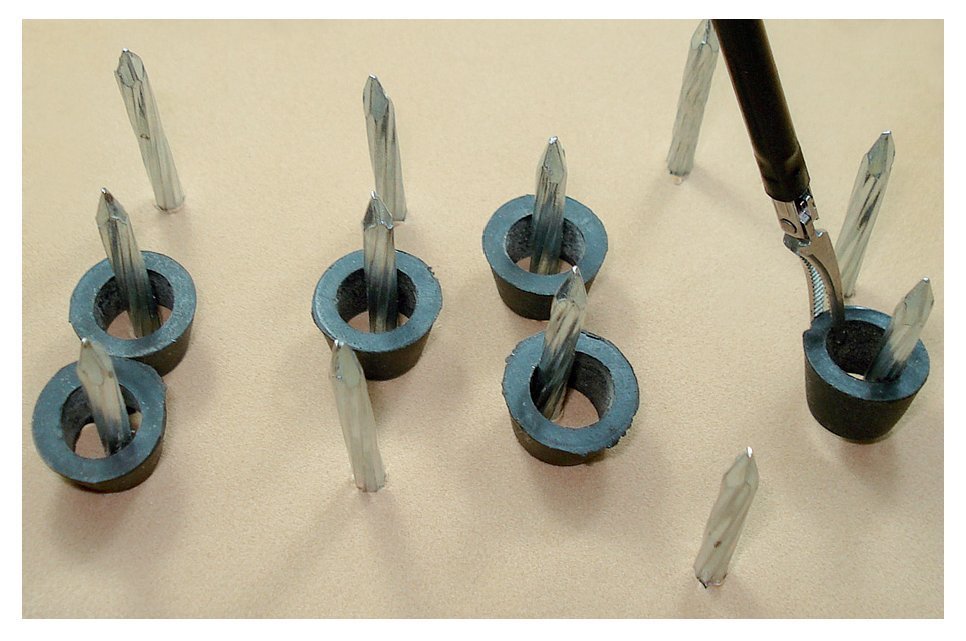
Imagen 3. Coordinación motora y háptica.
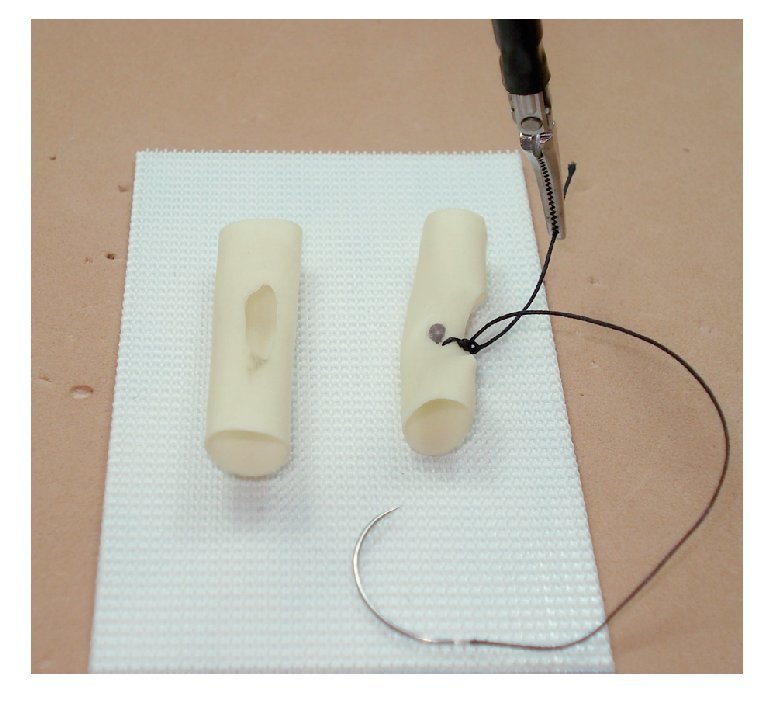
Imagen 4. Sutura intracorpórea.
El espacio de trabajo ofrece el manejo adecuado de los instrumentos, a semejanza del modelo real, con puertos de entrada de fácil acceso, separados de manera equidistante de 5 a 7 cm entre sí, y con una distancia en profundidad desde el puerto hasta la base del simulador de 12 cm en promedio. Ello permite la introducción de los instrumentos laparoscópicos hasta dos terceras partes de su longitud, de acuerdo con los principios de la geometría espacial, lo que facilita el adecuado manejo y desempeño de los instrumentos reproducido en el interior del simulador y con ello optimar el desarrollo de las habilidades del practicante (Imagen 5).
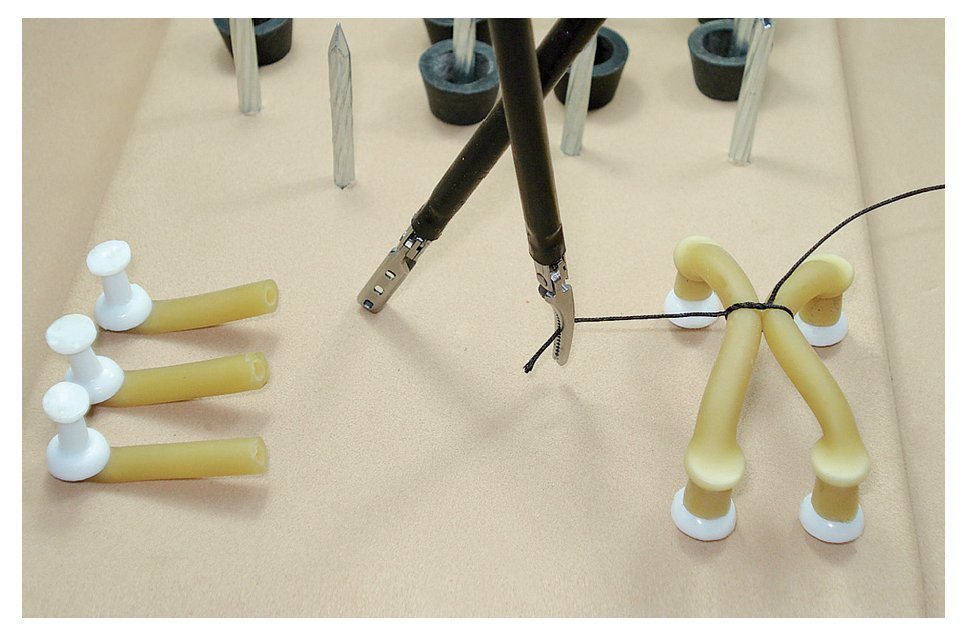
Imagen 5. Nudo intracorpóreo
¿ DISCUSIÓN
El número de indicaciones para la aplicación de cirugía laparoscópica ha seguido en expansión en los últimos años hasta abarcar un gran número de intervenciones quirúrgicas urológicas, incluidos procedimientos oncológicos y reconstructivos complejos. Sin embargo, el número de urólogos con entrenamiento en procedimientos laparoscópicos es bajo, como también lo es la experiencia necesaria en el campo, frente al número creciente de operaciones requeridas tributarias del beneficio de la laparoscopia ya conocido. La utilización de este aparato incrementaría las habilidades laparoscópicas del cirujano en cuestión, además de resolver el problema de acortar la curva de aprendizaje. En estos momentos, la técnica laparoscópica se considera superior a la técnica quirúrgica abierta tradicional para un número amplio de procedimientos que continúan incrementándose, lo que hace necesario el aprendizaje y entrenamiento constantes en esta técnica tanto por cirujanos novatos como por laparoscopistas expertos para el grado de habilidad requerido.3,8
Existen muchas limitaciones, como la dificultad técnica para el acceso quirúrgico y el instrumental requerido, con una curva de aprendizaje muy prolongada. Ante ello, existen numerosas modalidades de entrenamiento usadas alrededor del mundo, como cursos con modelos animales, instrucción tutorial intraoperatoria, simuladores virtuales y simuladores inanimados, todos ellos de alto costo y de acceso difícil o limitado.9,10
Los simuladores virtuales son muy caros comparados con los entrenadores mecánicos estándar y requieren un soporte técnico continuo. Existen numerosos cursos para el propósito de aprender cirugía laparoscópica, pero no se cuenta con un objetivo medible de las habilidades adquiridas en los mismos y la falta de una práctica continua termina en la pérdida de las habilidades adquiridas. Lo anterior suele producirse en el primer o segundo año posterior al entrenamiento, lo que minimiza el valor de tales cursos.3
Hay un incremento concerniente al entrenamiento de un residente quirúrgico estimado en $50 000 dólares en Estados Unidos, mientras que el costo de los simuladores varía de $5 000 a $200 000 dólares de acuerdo con la complejidad del mismo.
El entrenamiento en animales vivos, y de manera específica en modelos porcinos, provee la mejor retroalimentación táctil y anatómica; sin embargo, la regulación de las leyes de protección animal y el elevado costo (uso de anestesia, medicamentos, soluciones, pago por derecho de sala adaptada a procedimientos laparoscópicos), así como la limitada opción de realizar el ejercicio en múltiples ocasiones en el mismo modelo lo hacen una propuesta en extremo cara para su uso de rutina.
Hoy en día los simuladores inanimados mecánicos son de amplio uso en programas de entrenamiento y se consideran como la mejor opción para adquirir las habilidades necesarias para cirugía laparoscópica. Cumplen con las demandas del aprendizaje de una técnica en medicina en términos de factibilidad (aplicación de técnicas quirúrgicas a través de un modelo anatómico), reproducibilidad (cualidad de emular un procedimiento en un modelo anatómico basado en la técnica quirúrgica), análogo al modelo real (al utilizar los mismos instrumentos laparoscópicos y recurrir a tejidos animales) y, para terminar, de costo accesible en comparación con otras modalidades de entrenamiento, lo que lo vuelve una opción viable en relación costobeneficio.1,2
Por todas estas ventajas, se diseñó un modelo de bajo costo de adquisición, así como de su costo de mantenimiento, que además cuenta con un diseño basado en el sistema MISTELS (sistema de amplia validación en cirugía laparoscópica general y en procedimientos urológicos), que lo vuelve una opción viable, muy atractiva y al alcance de cualquier médico. Además, permite su empleo en diferentes cursos, ya que al ofrecer la oportunidad de desarrollar habilidades medibles, puede utilizarse como una base objetiva para la adquisición de una constancia válida por parte de las diferentes asociaciones, colegios o agrupaciones de médicos donde se ofrecen cursos de entrenamiento en cirugía laparoscópica.
¿ CONCLUSIONES
El entrenamiento en cirugía laparoscópica ha llegado a ser un importante tópico no sólo para el aprendizaje, sino también para el mantenimiento de las habilidades necesarias y para preparar escenarios para resolver las complicaciones. Para esos propósitos, los simuladores mecánicos juegan definitivamente un papel muy importante en el futuro de la cirugía laparoscópica.
El simulador inanimado mecánico o de caja propuesto hace que su diseño anatómico a escala real sea la mejor opción para ejercitar la técnica laparoscópica y adquirir las habilidades necesarias.
Correspondencia:
Dr. Francisco Ramos Salgado.
Servicio de Urología, Hospital de Especialidades, Centro Médico Nacional Siglo XXI, IMSS.
Avenida Cuauhtémoc No. 330, Col. Doctores, Delega- ción Cuauhtémoc, CP 06725, México, D. F.
Tel.: 5627 6900, Extensión 21518.
Correo electrónico:pacoramos4@yahoo.com.mx