








Objetivo
Implantación precisa de prótesis de superficie de cadera mediante navegación por ordenador sin imágenes. Evitar el posicionamiento incorrecto del implante en la cabeza del fémur, que podría provocar un fracaso prematuro del implante.
Indicaciones
Coxartrosis con densidad ósea normal; deformidad leve de la cabeza femoral que permita fresar el cuello del fémur sin lesionarlo.
Contraindicaciones
Osteoporosis; necrosis avanzada de la cadera; alergia al níquel; cotilo pequeño con cuello femoral ancho, que generaría una pérdida ósea acetabular innecesaria; embarazo actual o previsto, lactancia.
Técnica quirúrgica
Exposición de la articulación coxofemoral a través de un abordaje dorsal convencional; introducción bicortical de un tornillo de Schanz para el alojamiento de la estrella de referencia a la altura del trocánter menor. Referenciación de los epicóndilos, los cuatro planos del cuello y la cabeza femoral con el puntero de navegación; planificación de la posición del implante en la pantalla con cobertura estéril; introducción de una aguja guía bajo navegación y fresado de profundidad asistido por navegación. Fresado canulado de la cabeza del fémur; implantación convencional del cotilo. A continuación, cementación del componente femoral con cemento
de alta viscosidad, evitando los golpes de martillo. Verificación de la posición del implante mediante el sistema de navegación; retirada del tornillo de Schanz. Reducción de la articulación y cierre habitual de la herida.
Tratamiento postoperatorio
Movilización con dos muletas con una carga parcial de 20 kg durante dos semanas, carga con la mitad del peso corporal hasta la sexta semana y, a continuación, carga total y alta médica.
Resultados
La comparación de 40 prótesis ASR® implantadas bajo navegación con otras 32 prótesis implantadas de manera convencional reflejó una reducción significativa de los valores atípicos en el caso de la navegación por ordenador (con navegación: 1 valor atípico, convencional: 9 valores atípicos; p < 0,001). Se detectó una desviación de 1º del ángulo del cuello femoral así como una discrepancia de 1º en la antetorsión y de 1,5 mm en la lateralidad entre la posición prevista del implante y la verificada en la navegación. Un estudio anatómico más exhaustivo basado en la tomografía computarizada determinó una precisión de 1º para el sistema de navegación en el plano frontal.
Notas preliminares
En los últimos años ha aumentado considerablemente el número de prótesis de superficie de cadera implantadas19. Además de una tasa de luxación reducida y una propiocepción mejorada, la prótesis de superficie presenta como ventaja crucial la conservación del hueso en previsión de eventuales cirugías de recambio27. La complicación más frecuente tras la implantación de una prótesis de superficie de cadera es la fractura del cuello del fémur, cuya incidencia se sitúa entre el 0-2,8%2,9,17,27,28. El riesgo de estas fracturas, que aparecen en la fase postoperatoria temprana, depende sobre todo de la orientación del componente femoral1,3,5,16,18,20,25,28. Los estudios existentes demuestran que una implantación en varo, un ángulo < 130º entre el implante y la diáfisis, superficies de esponjosa expuestas previamente fresadas del cuello femoral o una melladura (notching) del cuello están asociadas con una mayor tasa de fracturas. Por este motivo se recomienda implantar la prótesis de superficie de cadera con un ángulo del cuello femoral (ángulo CCD) en valgo y una antetorsión natural27.
Sin embargo, estudios clínicos y experimentales han demostrado que a menudo esta posición deseada del implante no se puede alcanzar con la precisión suficiente mediante el instrumental facilitado por los fabricantes5,7,8,11,12,23. Por lo tanto, cualquier ayuda que mejore la precisión de la implantación puede resultar de utilidad11. Tras haber demostrado una mayor precisión y una reducción de los valores atípicos en las endoprótesis de rodilla, nuestra clínica ha introducido la navegación por ordenador sin imágenes también para la implantación de prótesis de superficie de cadera. Se han realizado estudios clínicos y experimentales exhaustivos para analizar la precisión y la fiabilidad de la navegación en comparación con la implantación convencional.
Principios quirúrgicos y objetivos
Evitar con seguridad el posicionamiento incorrecto del componente femoral de la prótesis de superficie de cadera mediante la navegación por ordenador sin imágenes. En primer lugar se capta la superficie del hueso y a continuación se realiza el ajuste fino de la posición del implante sobre la pantalla. Bajo navegación, se introduce la aguja guía y se taladra en profundidad; seguidamente, la cabeza del fémur se somete a un fresado canulado.
Ventajas
• Se evita el posicionamiento incorrecto del componente femoral.
• Planificación exacta del ángulo CCD, la antetorsión y la lateralidad del implante.
• Identificación correcta del centro de rotación y del centro del cuello del fémur, también en el caso de cabezas femorales deformadas.
• No es necesario realizar radiografías intraoperatorias.
• Control intraoperatorio directo de la posición del componente femoral implantado mediante una verificación.
Desventajas
• Es necesario adquirir un sistema de navegación (costes).
• La intervención se prolonga unos 15 min más.
Indicaciones
• Coxartrosis.
• Deformidad leve de la cabeza del fémur que permita fresar el cuello del fémur sin lesionarlo.
Contraindicaciones
• Osteoporosis.
• Necrosis avanzada de la cabeza del fémur.
• Alergia al níquel.
• Embarazo, lactancia.
• Cotilo pequeño con cuello femoral ancho, que generaría una pérdida ósea acetabular innecesaria.
• Contraindicaciones habituales para la implantación de una endoprótesis (lesión cutánea, infección, etc.).
Información para el paciente
• Información habitual sobre los riesgos quirúrgicos de las endoprótesis. Información adicional sobre los riesgos específicos de la prótesis de superficie: fractura del cuello del fémur, metalosis, concentración aumentada de iones metálicos en la sangre debido al par de fricción metal-metal, necrosis de la cabeza del fémur.
• Se informará de la aplicación de la navegación por ordenador.
• Se advertirá del riesgo teórico de fractura por la introducción del tornillo de Schanz adicional.
Preparación de la intervención
• Examen clínico del paciente.
• Radiografías de la articulación de la cadera en dos planos.
• Análisis de laboratorio.
• Rasurado del campo quirúrgico.
• Dosis única de antibiótico antes de comenzar la intervención.
• Medición de la densidad ósea ante la sospecha de osteoporosis.
Instrumental e implantes
• Instrumental habitual para tejido blando y hueso.
• Instrumental especial para la implantación de una prótesis de superficie (en este caso, instrumental ASR®, de-Puy, Leeds, Reino Unido).
• Instrumental de navegación de Brainlab (Feldkirchen, Alemania): guía para taladro asistido por navegación, manguito para alineamiento asistido por navegación, pinza antirotación, puntero angulado Ci®, puntero de ángulo inverso Ci®; herramienta de verificación de la posición del pivote central DePuy; array de referencia con geometría en Y X-press, fijador óseo con espiga X-press tamaño M/L, llave de espiga X-press; tornillos de Schanz desechables Ci® de 6 mm/200 mm.
• Aparato de navegación Kolibri con Ci Hip 2.1.0 Software® (Brainlab).
Anestesia y posición del paciente
• Anestesia general o regional.
• Posición de decúbito lateral o supino, dependiendo del abordaje quirúrgico preferido (fig. 1b).
• Entallado libre de la pierna afectada (fig. 1b).
• Aparato de navegación con cobertura estéril sobre el monitor (fig. 1b).
Técnica quirúrgica
Figuras 1 a 7
Ejemplo de una intervención de la cadera izquierda en posición de decúbito lateral
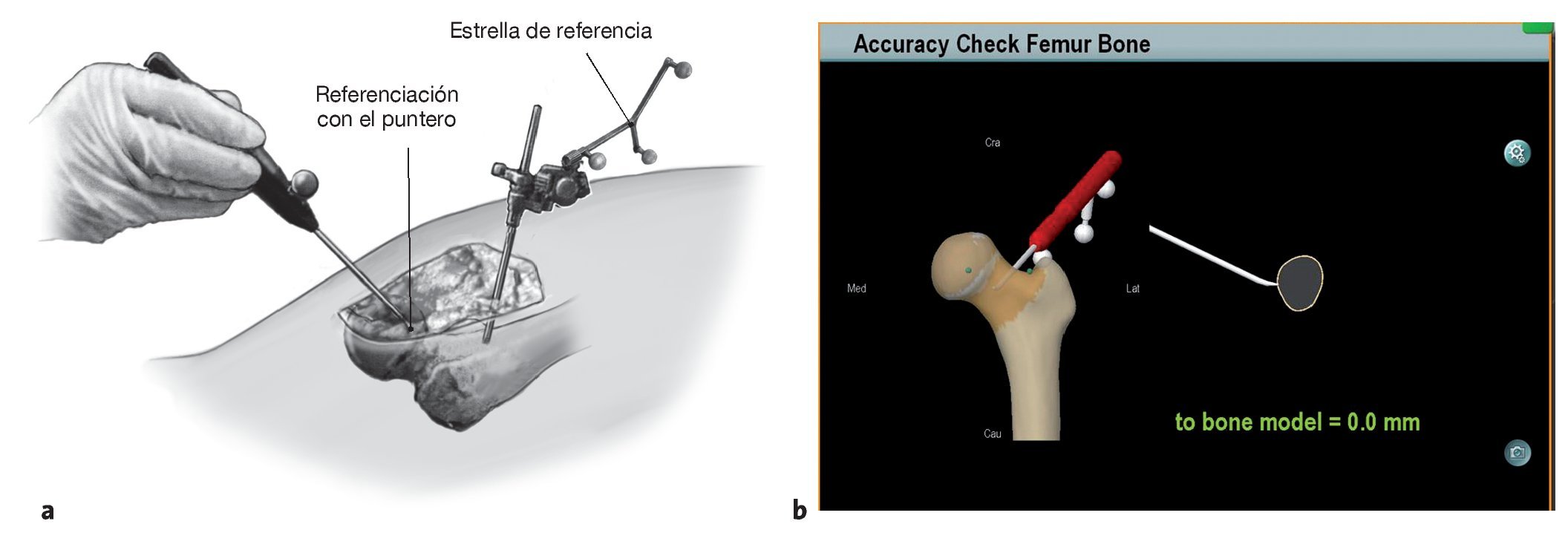
Figuras 1a y 1b Abordaje dorsal habitual. Introducción de un tornillo de Schanz de 6 mm (bicortical) a la altura del trocánter menor. La estrella de referencia se fija en el tornillo de Schanz y se orienta según la cámara de navegación (a). Disposición del aparato de navegación en el quirófano (b).
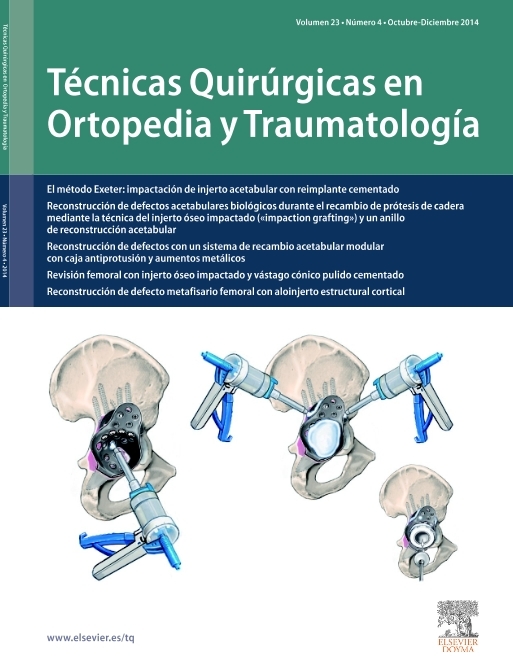
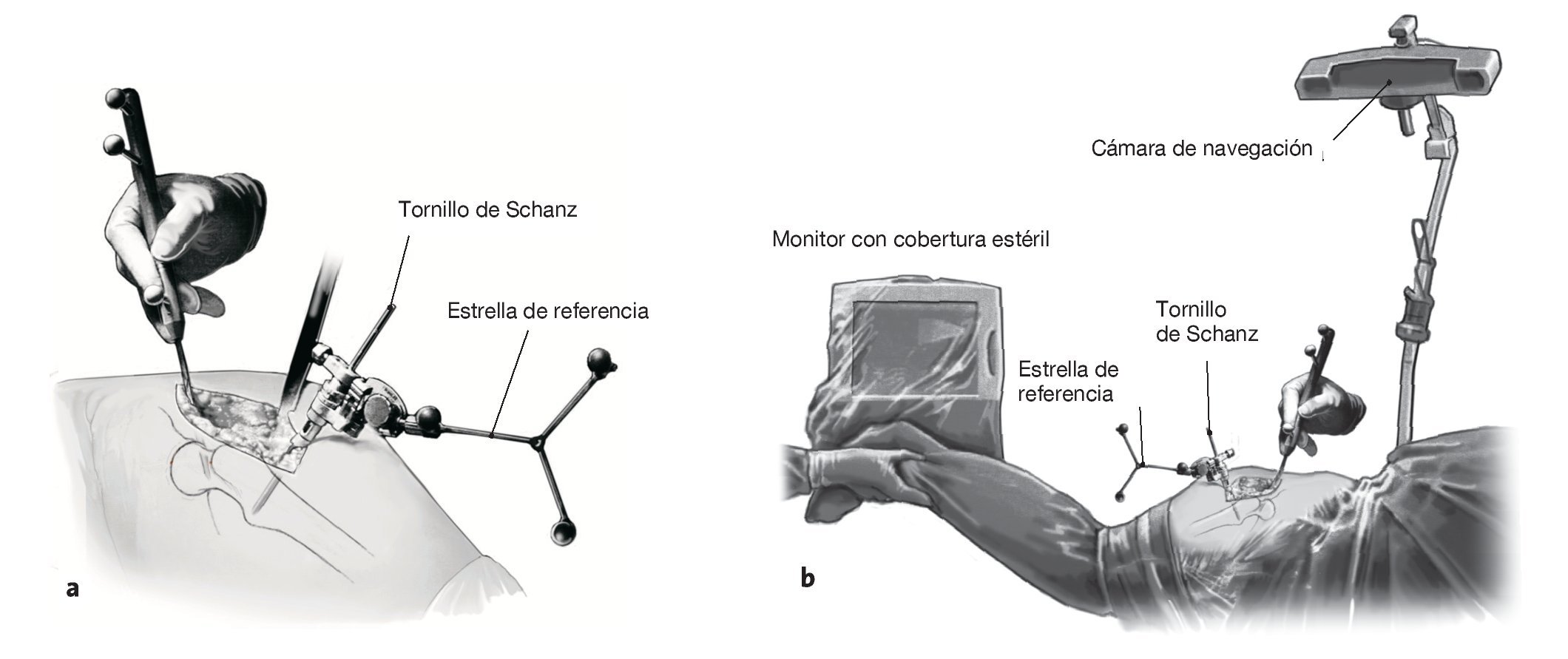
Figuras 2a y 2b Con el puntero se realiza la referenciación de la superficie del fémur conforme al flujo de trabajo del software. Se registran los epicóndilos, el punto medio lateral del cuello situado en prolongación del eje de la diáfisis, la cabeza del fémur y los cuatro planos del cuello del fémur (a). La exposición de la porción anterior del cuello del fémur resulta técnicamente difícil si se ha usado un abordaje dorsal. En este caso, el uso de un separador de gancho especial, la «cucharilla Puttlinger (DePuy), puede simplificar la exposición. A continuación, se controla con el puntero la precisión de la superficie ósea referenciada en el sistema de navegación (b).

Figura 3 El software del aparato de navegación calcula automáticamente el tamaño apropiado del implante y la posición anatómica correspondiente al ángulo CCD registrado, a la antetorsión registrada y a la lateralidad anatómica. El cirujano comprueba estos datos en la pantalla del aparato de navegación. El ángulo CCD, la antetorsión, la lateralidad, la posición de la cúpula femoral y el tamaño del implante se pueden ajustar y optimizar manualmente conforme a una planificación preoperatoria. La línea roja muestra la posición anatómica de la prótesis propuesta por el sistema de navegación, y la línea amarilla la posición del implante ajustada por el cirujano. Una vez realizados los ajustes se puede volver a comprobar con el puntero el riesgo de aparición de una muesca en el cuello del fémur. En caso de existir este riesgo, la punta del puntero aparece en rojo en el monitor.

Figuras 4a y 4b Mediante un manguito para broca con una estrella de navegación (a), el sistema de navegación detecta la posición de la aguja y la refleja en el monitor (b). De esta forma, el cirujano puede introducir la aguja guía conforme al eje.

Figuras 5a y 5b Fresado de profundidad asistido por navegación sobre la aguja guía introducida previamente (a). Mediante la estrella de navegación dispuesta sobre la fresa puede verse en la pantalla de navegación la posición actual de la fresa en relación con la posición prevista del implante (b). Una vez realizado el fresado de profundidad, la posición del implante está establecida en las tres dimensiones.

Figuras 6a a 6d Conforme al fresado de profundidad asistido por navegación se inserta un manguito adaptado al tamaño del implante. A través de este manguito se realiza un fresado canulado de la cabeza del fémur (a). A continuación, se lleva a cabo de forma habitual el implante no cementado del componente acetabular por impactación a presión. La posición del cotilo se elige de tal manera que se evite, por una parte, una solicitación del borde y, por otra, un atrapamiento del cuello del fémur. Durante el fresado acetabular deberá evitarse el contacto entre el tornillo de Schanz y la fresa a fin de evitar el aflojamiento del tornillo de Schanz. A continuación, se realiza la perforación canulada del orificio central de la cabeza del fémur con un escariador de acabado para evitar la transmisión de carga al pivote del implante (b). Con el componente de prueba se marca el borde de la cúpula femoral (c). Se aplica manualmente el cemento de alta viscosidad y se empuja el componente femoral hasta la marca de profundidad (d). Para evitar microfracturas de la cabeza del fémur se prescindirá de los golpes de martillo; para evitar una fijación demasiado temprana de la prótesis de superficie se aplica una capa de cemento de tan sólo 2 mm de grosor sobre la cabeza.

Figuras 7a y 7b Una vez implantado el componente femoral se verifica su posición: para ello se examina la superficie del componente femoral mediante la herramienta de verificación de la posición del cuello (a). El sistema de navegación registra la posición real de la cúpula femoral y la compara con la prevista (b). Cierre de la herida con refijación transósea de los rotadores externos, colocación de un drenaje de Redon y de un vendaje en espiga.
Tratamiento postoperatorio
• Reposo postoperatorio con cojín de abducción de cadera en posición de rotación media, profilaxis antibiótica con 40 mg de enoxaparina una vez al día hasta la carga con la mitad del peso corporal, terapia respiratoria.
• Movilización a partir del primer día postoperatorio con muletas con carga parcial de 20 kg durante 2 semanas y, a continuación, con la mitad del peso corporal para permitir la integración de los rotadores externos fijados con sutura transósea. A las 6 semanas se realizará un control radiológico y se procederá a la carga total.
• Fisioterapia bajo supervisión para mejorar el patrón de marcha, subir escaleras y prevenir la luxación (utilización de un cojín-cuña de abducción en la cama durante 10 días, ejercicios fisioterapéuticos: se evitarán los movimientos de flexión y rotación interna de la cadera así como sentarse en asientos bajos y agacharse).
• Una vez curada la herida, se dará el alta para continuar con el tratamiento de rehabilitación ambulatorio o en el hospital.
Errores, riesgos y complicaciones
• Exposición incompleta o no idónea del cuello del fémur con el resultado de una referenciación incorrecta: para la exposición adecuada del cuello del fémur en los cuatro planos es necesario colocar correctamente los separadores de gancho, elegir un abordaje suficientemente amplio y extirpar las partes blandas. La resección de los osteofitos es útil y necesaria si estos obstaculizan o alteran la referenciación.
• Planificación incorrecta de la posición del implante en la pantalla durante la intervención: resulta útil medir el ángulo CCD proyectado en la radiografía preoperatoria para comprobar la validez de los datos de navegación; es posible comprobar el ángulo CCD previsto mediante el puntero en el sistema de navegación. Comprobación del tamaño propuesto del implante mediante plantillas convencionales en el cuello del fémur.
• Aflojamiento del tornillo de Schanz que soporta la estrella de navegación: deberá prestarse atención al anclaje bicortical del tornillo de Schanz. Con nuestros pacientes no se ha producido ningún aflojamiento de los tornillos utilizando esta técnica. Caso de aflojarse los tornillos durante la intervención, deberá suspenderse o reiniciarse la navegación. Especialmente durante el fresado acetabular deberá evitarse el contacto entre el tornillo de Schanz y las fresas.
• Melladura del cuello del fémur pese a la navegación: los autores no lo han observado hasta la fecha. Si aun así se produjera, deberá implantarse una endoprótesis femoral convencional. Puesto que normalmente se habrá implantado previamente el componente acetabular, deberán usarse cabezas grandes especiales, de tamaño correspondiente al diámetro interior del cotilo implantado.
• El componente acetabular no se puede anclar por impactación a presión: se sustituirá por otro implante con un cotilo cementado o un cotilo roscado. El implante del componente femoral de la prótesis de superficie ya no será posible.
• Para el implante del componente femoral se requiere un cotilo que condicionaría una pérdida ósea acetabular innecesaria: para evitarla deberá implantarse una prótesis de vástago convencional con un componente acetabular más pequeño.
Resultados
Entre enero de 2007 y abril de 2009 se registraron un total de 72 implantes consecutivos de la prótesis ASR® (De-Puy). En 40 pacientes se realizó el implante del componente femoral mediante navegación por ordenador (Ci Hip 1.0.0, 2.0.1 y 2.1.0®, Brainlab), y 32 prótesis se implantaron de forma convencional con el instrumental facilitado por el fabricante. Grupo de navegación: promedio de edad 56 años (39-74 años, desviación típica 6 años), 23 hombres y 17 mujeres. Grupo convencional: promedio de edad 52 años (37-67 años, desviación típica 7 años), 20 hombres y 12 mujeres.
En primer lugar se midió en la radiografía convencional el ángulo CCD proyectado entre el eje anatómico de la diáfisis y el eje del cuello del fémur. Para el grupo de navegación se obtuvo un ángulo CCD preoperatorio medio de 133º (118-146°, desviación típica 6º). En el grupo convencional el ángulo CCD preoperatorio medio se situó en 130ºC (122-146°, desviación típica 6º).
Al contrario que en la endoprótesis de rodilla, existen pocos estudios biomecánicos que analicen las diferentes posiciones de la cúpula femoral y el riesgo de fractura resultante o la vida útil de la prótesis10. En un estudio biomecánico propio demostramos que, si la densidad ósea es normal, se pueden prevenir las fracturas del cuello del fémur mediante una valguización del implante25. Según un análisis sistemático de la bibliografía, para la posición del componente femoral se definieron los siguientes criterios: posición en valgo respecto al ángulo CCD preoperatorio25,27, ángulo CCD > 130º5, ausencia de muescas o esponjosa expuesta previamente fresada del cuello femoral16,29. Además, es necesario utilizar el menor tamaño de implante posible para evitar una pérdida ósea acetabular innecesaria6.
En todos los pacientes se realizó la implantación de las prótesis de superficie, no siendo necesario el cambio a una prótesis de vástago convencional, que habría estado indicado en caso de lesión intraoperatoria del cuello del fémur o ante una previsible pérdida ósea excesiva en el acetábulo.
El análisis de las radiografías postoperatorias reflejó que los criterios antes mencionados se alcanzaron en 39 pacientes del grupo de navegación (97,5%). Sólo en un paciente con un ángulo CCD preoperatorio de 120º no pudo lograrse un ángulo postoperatorio > 130º, puesto que se habría producido una muesca en el cuello superior del fémur. El ángulo CCD postoperatorio ascendió a un promedio de 139º (126-148º, desviación típica 5º), por lo que se efectuó una valguización media de 5º (0-18º, desviación típica 4º). Con la implantación convencional del componente femoral, los criterios se alcanzaron únicamente en 23 pacientes (72%). En cuatro pacientes se realizó el implante en una posición ligeramente en varo (1-3º varo), en tres pacientes se objetivaron superficies de esponjosa expuestas, y otros dos pacientes presentaron un ángulo CCD postoperatorio < 130º. En resumen, la navegación por ordenador sin imágenes nos permitió realizar una implantación más precisa de las prótesis de superficie de cadera reduciendo los valores atípicos (prueba U de Mann-Whitney: p < 0,001). El ángulo CCD postoperatorio medio de las prótesis implantadas de forma convencional ascendió a 135º (128-150º, desviación típica 5º). La valguización media fue de 4º (3º varo-12º valgo, desviación típica 4º). En la figura 8 se expone un resumen de los ángulos CCD preoperatorios y postoperatorios. El análisis de la precisión del implante asistido por navegación de los componentes femorales se llevó a cabo comparando la posición del componente femoral prevista en el software del sistema de navegación con la verificada. La diferencia entre el ángulo CCD previsto y el implantado bajo navegación fue de 1º y la antetorsión prevista y medida del implante también discrepó en 1º. La diferencia entre la lateralidad femoral prevista y la lateralidad de la prótesis fue de 1,5 mm. En otro estudio anatómico24 analizamos la discrepancia de los datos del software de navegación con la realidad anatómica. La comparación de los datos del software de navegación con las mediciones realizadas por tomografía computarizada indicó una precisión de 1º para el ángulo CCD indicado. De este modo se han validado los datos indicados por el software de navegación en relación con la precisión de las prótesis implantadas, aunque el estudio ha revelado también un problema de dicho software: a menudo, la posición del componente femoral propuesta no es la idónea. Esto significa que durante la intervención suele ser necesario realizar un ajuste fino manual de la posición del implante en pantalla. En la práctica, este ajuste suele lograrse sin problemas mediante la planificación preoperatoria con la radiografía y las nubes de puntos que aparecen en el monitor y que corresponden a la superficie ósea. Con este modo de proceder se evitan de forma fiable los valores atípicos y se alcanza con seguridad la posición deseada del implante, como se demuestra en este estudio.

Figura 8 Resumen de los ángulos CCD preoperatorios y postoperatorios.
El análisis de la duración de las intervenciones muestra que, después de una marcada curva de aprendizaje, la intervención se prolonga 15 min más en el caso de la navegación (las intervenciones navegadas duran una media de 113 min y las intervenciones convencionales una media de 98 min).
La navegación sin imágenes permite implantar el componente femoral de la prótesis de superficie de cadera con gran precisión y reducir significativamente el número de valores atípicos en comparación con el procedimiento convencional. Estos resultados han sido confirmados posteriormente por publicaciones de otros equipos4,8,11,13-15,21-23,26.
Nuestros análisis en profundidad demostraron por primera vez la elevada precisión del sistema de navegación, aunque al mismo tiempo un estudio basado en la tomografía computarizada reveló que en ocasiones la planificación automática del software no es la idónea.
Conflicto de intereses: no existe ningún conflicto de intereses. DePuy proporcionó los implantes y el cemento óseo para el estudio biomecánico25 y Brainlab facilitó una versión de prueba del software de navegación para el trabajo anatómico relativo a la precisión de la navegación24. No existen relaciones económicas adicionales con las empresas mencionadas ni con otras vinculadas al estudio.
Correspondencia
Dr. Christoph Schnurr
Clínica de Ortopedia LVR de Viersen Horionstrasse 2
41749 Viersen (Alemania)
Tel.: (+49/2162) 966-201; fax: -240
Correo electrónico: christophschnurr@gmx.de