




El verdadero esófago corto es una entidad que causa mucha controversia entre los cirujanos. Se han publicado estudios acerca de su diagnóstico y tratamiento laparoscópico, sin que a día de hoy existan publicaciones del tratamiento con abordaje robótico. Presentamos, en forma de caso clínico, nuestra experiencia en cirugía robótica de hernia de hiato con verdadero esófago corto tratada con gastroplastia de Collis y fundoplicatura de Toupet. La cirugía robótica en el verdadero esófago corto puede facilitar la disección mediastínica y permitir una técnica de sutura más precisa. Son necesarios estudios para comparar los resultados a largo plazo de esta técnica quirúrgica entre el abordaje laparoscópico convencional y el abordaje robótico.
The true short esophagus is an entity of controversy among surgeons. Studies have been published about its diagnosis and laparoscopic treatment, without existing to date, publication of the treatment with robotic approach. We present, as a case report, our experience in robotic surgery for hiatal hernia with true short esophagus treated with Collis gastroplasty and Toupet fundoplication. Robotic surgery on the true short esophagus can facilitate mediastinal dissection and allow a more accurate suture technique. Studies are needed to compare the long-term results of this surgical technique between the conventional laparoscopic approach and the robotic approach.
El verdadero esófago corto es un diagnóstico intraoperatorio definido como la presencia de una porción de esófago, sin tensión, inferior a 2-3cm entre la unión gastroesofágica y el hiato diafragmático después de una extensa disección mediastínica de 7-10cm1-3.
La incidencias de verdadero esófago corto en los pacientes intervenidos de cirugía antirreflujo es de entre el 3 y el 20%1,4.
Una deficiente disección mediastínica que impida evaluar la porción esofágica intraabdominal real puede comportar un sobrediagnóstico de verdadero esófago corto. Una disección insuficiente también puede comportar un incremento de la recurrencia de hernia de hiato tras la cirugía, causada por la migración de la fundoplicatura al mediastino1.
El tratamiento de la hernia de hiato con verdadero esófago corto sigue siendo motivo de controversia entre los cirujanos5-7. A pesar de que Bellevue et al.8, en un estudio de casos y controles, no encontraran diferencias en la eficacia entre los pacientes tratados con esofagopexia de Hill combinada con fundoplicatura de Nissen y los pacientes tratados con gastroplastia de Collis asociada a una técnica antirreflujo, la mayoría de la literatura actual apoya la gastroplastia de Collis asociada a una técnica antirreflujo como tratamiento de la hernia de hiato sintomática1-3,5,9.
Actualmente hay múltiples estudios publicados sobre el tratamiento del esófago corto vía laparoscópica, pero no se dispone de publicaciones sobre el abordaje robótico. Nuestro grupo de trabajo del Centro Hospitalario de Luxemburgo, un equipo con extensa experiencia en el campo de la cirugía mínimamente invasiva, quiere aportar un caso de diagnóstico y tratamiento de verdadero esófago corto con abordaje robótico de una técnica clásica. La cirugía robótica aporta precisión y seguridad en dicha técnica.
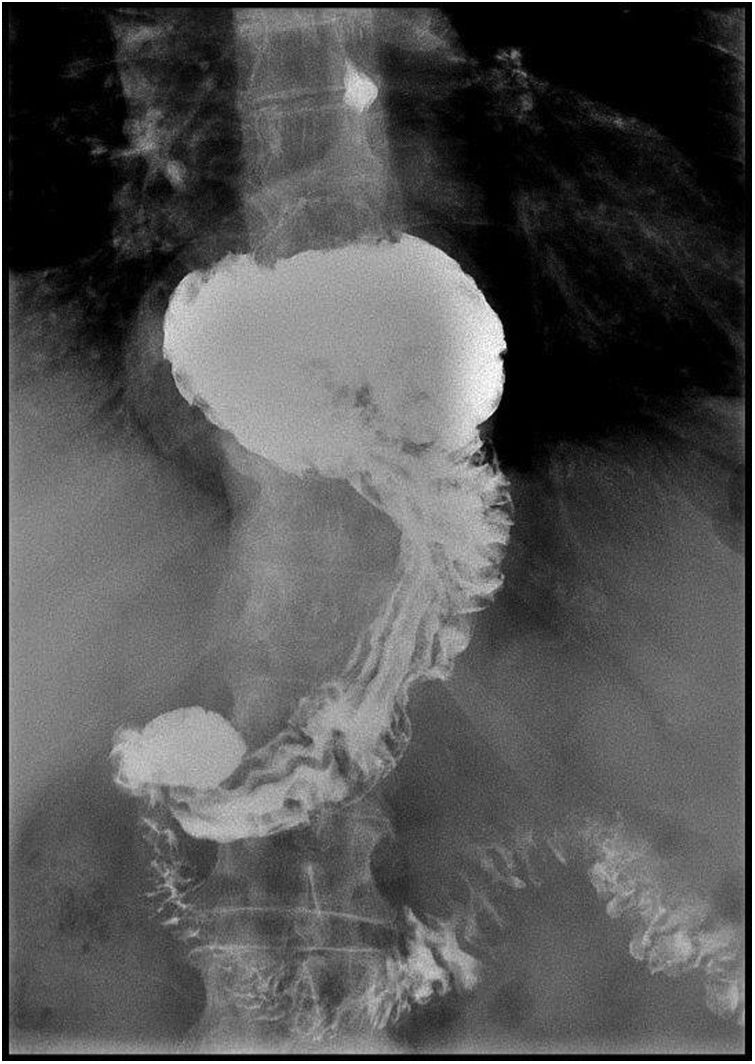
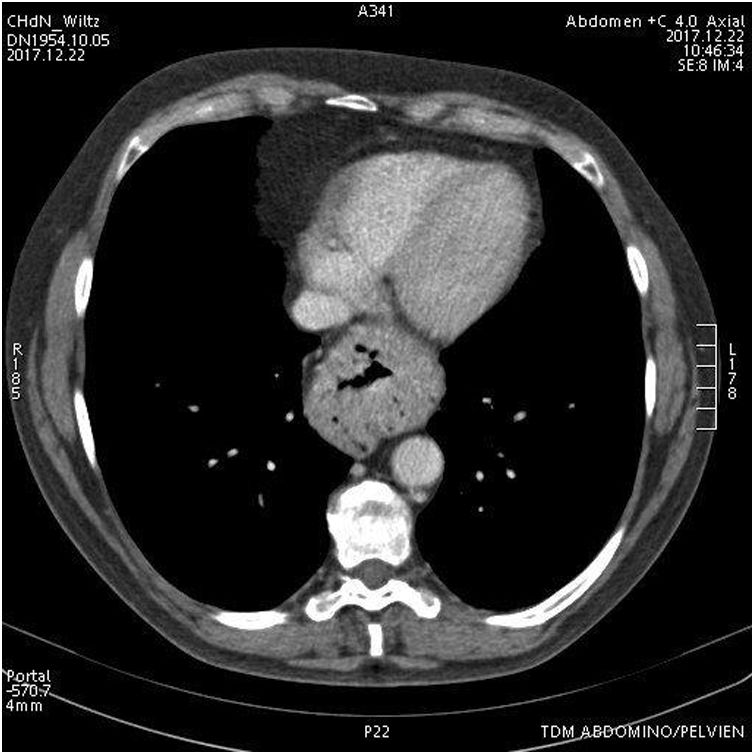
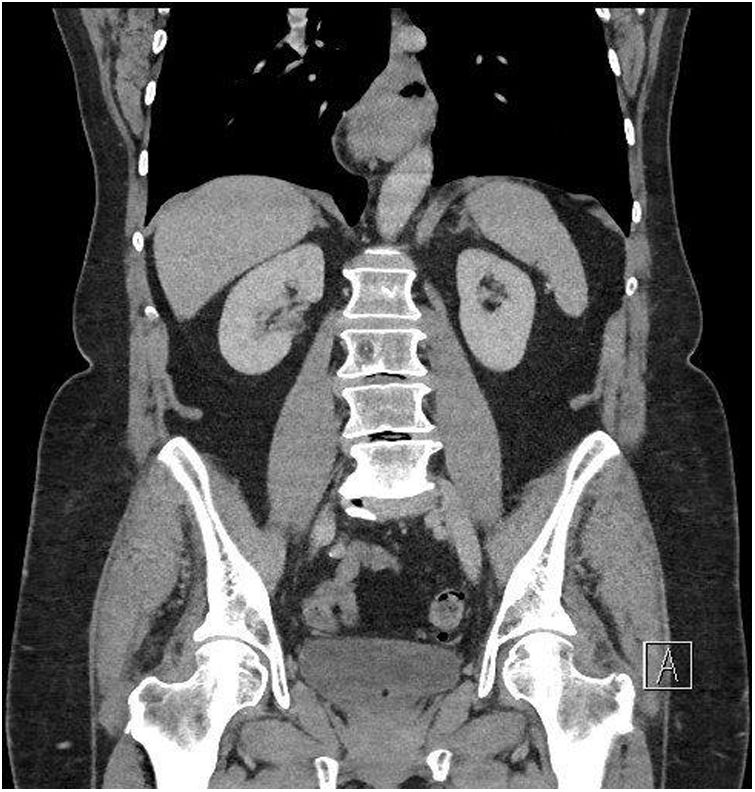
Caso clínicoSe trata de una paciente de 65 años diagnosticada de hernia de hiato sintomática de 2años de evolución. A pesar del tratamiento conservador, con recomendaciones posturales y dietéticas, y de inhibidores de la bomba de protones, la paciente presenta empeoramiento de la clínica de reflujo gastroesofágico. El control radiológico muestra incremento del tamaño de la hernia de hiato de 4cm (de 2cm a 6cm) (figs. 1-3). Preoperatoriamente se realiza una endoscopia que informa de gastritis y esofagitis en ausencia de esófago de Barret y lesiones neoplásicas. Ante el diagnóstico de hernia de hiato sintomática resistente al tratamiento y sospecha diagnóstica de esófago corto, se indica tratamiento quirúrgico.



Se realiza un abordaje robótico; tras la reducción de la hernia de hiato y la disección mediastínica se obtiene el diagnóstico de verdadero esófago corto. Se confecciona una gastroplastia de Collis con fundoplicatura parcial de tipo Toupet.
Ante la ausencia de incidencias perioperatorias, la paciente recibe el alta a las 48h de la intervención, con correcta tolerancia oral y asintomática.
Técnica quirúrgicaDespués de un año de experiencia en cirugía robótica, con numerosas intervenciones de cirugía metabólica, colorrectal, pancreática, esofágica y gástrica, queremos completar la curva de aprendizaje añadiendo un caso de hernia diafragmática.
ColocaciónTras la inducción anestésica, el paciente es colocado en posición anti-Trendelenburg (30°), piernas en abducción, flexionadas (15°), y brazos en aducción completa.
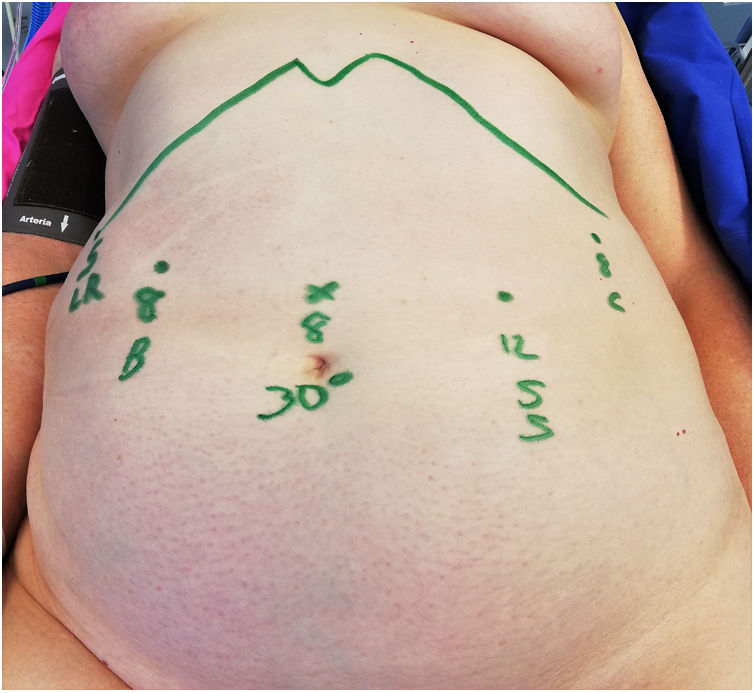
Son necesarios 5 trocares colocados tras previa creación de neumoperitoneo con aguja Veress, insertada en el cuadrante superior izquierdo del abdomen.
Siguiendo el esquema (fig. 4), se coloca un trocar de 8mm para la cámara de 30° en línea media supraumbilical (20cm del xifoides). De derecha a izquierda del paciente y bajo visión directa se coloca un trocar de 5mm a nivel de la línea axilar anterior subcostal derecha para el retractor de hígado que quedará fijado durante toda la cirugía, un trocar de 8mm en línea clavicular media derecha para la pinza bipolar, un trocar de 12mm en línea clavicular media izquierda para la grapadora y las tijeras, y finalmente uno de 8mm a nivel de la línea axilar anterior subcostal izquierda para las pinzas. El robot se colocará a la izquierda del paciente.
Disección
El retractor hepático fijado nos permite ver el hiato diafragmático sin tener que ocupar uno de los brazos del robot y sin precisar asistencia laparoscópica.
Usando bipolar y tijeras se inicia la disección del saco herniario por el pilar derecho del hiato esofágico. Es preciso localizar la vena cava y las ramas del nervio vago. Uno de los brazos del robot, el 3.° o el 4.°, realiza tracción caudal del estómago exponiendo el saco herniario. Se continúa disección anterolateral hasta obtener la exposición del ángulo de His y del fundus gástrico. Es importante la lisis de posibles adherencias al bazo para evitar hemorragias que entorpezcan la disección. La disección de 360° se finaliza con la parte posterior, siendo esta la más difícil, tanto por la dificultad de exposición como por la proximidad de la aorta.
Al tener toda la circunferencia esofágica disecada, se coloca una cinta que permite realizar tracción en dirección caudal de forma uniforme. La disección continúa 3-4cm en dirección craneal, disección de TipoI1, hacia el mediastino. Si no se obtiene una porción de 2cm de esófago intraabdominal libre de tensión, como ocurre en el caso descrito, seguimos disecando el mediastino hasta 7-10cm, disección de tipoII1. Si, como en el caso presentado, la porción esofágica intraabdominal libre de tensión sigue siendo inferior a 2cm, obtenemos el diagnóstico de verdadero esófago corto.
En algunos centros se realiza endoscopia intraoperatoria para determinar la localización de la unión gastroesofágica3,4,8,10 (Vídeo 1: disección).
Confección de la plastiaNo es posible hacer una fundoplicatura sin tensión en el esófago corto, y por esta razón se realiza una gastroplastia de Wedge-Collis1 con fundoplicatura parcial posterior de tipo Toupet como técnica antirreflujo11-14.
Se realiza una gastroplastia de Wedge-Collis según la técnica descrita por Terry et al.15. Se procede a la liberación completa del fundus gástrico y de la parte más craneal de la curvatura mayor, coagulando los primeros vasos cortos. El diámetro de la plastia gástrica se determina con una sonda orogástrica de 42Fr. Con una endograpadora lineal introducida por el trocar de 12mm se secciona desde la curvatura mayor en dirección transversal y posteriormente en dirección craneal, respetando el diámetro de la sonda orogástrica y permitiendo un alargamiento del esófago de 3-4cm.
Una vez finalizada la gastroplastia, se aproximan los pilares diafragmáticos por la cara posterior creando una discreta angulación de la plastia; usamos una sutura barbada no reabsorbible (Vídeo 2: confección de la plastia).
Confección de la fundoplicaturaManteniendo la sonda orogástrica, se elabora la fundoplicatura posterior de tipo Toupet, fijándola con sutura barbada no reabsorbible. Se completa el cierre del defecto con la aproximación anterior de los pilares.
Tras revisar la cavidad abdominal, se extrae la pieza quirúrgica y se cierran las incisiones (Vídeo 3: confección de la fundoplicatura).
DiscusiónTeniendo en cuenta que el diagnóstico del verdadero esófago corto es intraoperatorio, la hernia de hiato debe ser tratada por un equipo capaz de modificar la técnica quirúrgica según los hallazgos encontrados durante la cirugía.
En el caso presentado, la técnica quirúrgica se eligió acorde a las recomendaciones de la literatura actual1-3,5,9, decidiendo realizar una gastroplastia de Collis para el alargamiento esofágico dado que es la técnica que menos recidivas de hernia de hiato ha demostrado con igual morbilidad. Por lo que se refiere a la técnica antirreflujo, no existen diferencias de eficacia entre la fundoplicatura de Nissen y la de Toupet11,14, presentando esta última menos incidencia de disfagia postoperatoria10-12.
Se opta por una aproximación primaria de los pilares sin material protésico, dado que actualmente no hay evidencia de que la prótesis ofrezca ventajas, comportando riesgo de adherencias y disfagia10,16.
Sabemos que el abordaje laparoscópico convencional, en comparación con el abordaje laparotómico, ofrece la misma incidencia de recurrencia de hernia de hiato con menos morbilidad y menos estancia hospitalaria17. A pesar del auge de la cirugía robótica, no existen publicaciones acerca de la gastroplastia de Collis robótica. Markar et al.18, en un metaanálisis de 5 estudios aleatorizados, comparan fundoplicatura de Nissen laparoscópica con robótica, sin encontrar diferencias en estancia hospitalaria, disfagia ni necesidad de reintervención.
Nuestra percepción es que el abordaje robótico permite una disección mediastínica más completa y una técnica de sutura más precisa gracias a una mejor sensación de profundidad ofrecida por visión 3D, mayor articulación de los instrumentos robóticos y abolición del temblor del operador y de la cámara. Horgan et al.19 sugieren, tras analizar 34 cirugías realizadas con Da Vinci (entre las cuales hay una fundoplicatura de Nissen y una de Toupet), que existe mejoría de precisión y seguridad del cirujano con el abordaje robótico obtenido por mejor coordinación ojo-mano, visión 3D y abolición del temblor. Son necesarios más estudios para descartar posibles diferencias de eficacia entre el abordaje laparoscópico convencional y el abordaje robótico.
FinanciaciónDeclaramos ausencia de financiación para este artículo.
Conflicto de interesesDeclaramos no tener conflicto de intereses.
Agradecemos la ayuda del Servicio Médico de Cirugía General y Visceral del hospital de Luxemburgo, así como el gran trabajo realizado por el equipo de enfermería.

