















Este articulo describe el desarrollo de un prototipo de un controlador de tráfico vehicular, cuyo sistema de comunicación se basa en el protocolo TCP/IP, para monitorear y controlar remotamente el funcionamiento de las luces de los semáforos de una intersección vehicular. Los resultados muestran los tiempos de comunicación entre la central y el controlador de tráfico. Las conclusiones destacan la importancia del uso del protocolo TCP/IP en los sistemas de semaforización.
This paper describes the development of a prototype of a vehicular traffic controller, whose system of communication is based on the TCP/IP protocol, in order to remotely monitor and control the operation of traffic lights for a vehicular intersection. The results show the times of communication between the central and the traffic controller. The conclusions highlight the importance of using the TCP/IP protocol in traffic light systems.
El incremento de automotores en las vías del mundo en los últimos años, además del aumento de movilización de personas en el cumplimiento diario de sus labores, requieren el desarrollo de sistemas de semaforización cada vez más robustos, que permitan una oportuna detección y notificación de fallas, que conlleva primero, a lograr una reducción en la contaminación (auditiva y atmosférica) al minimizar el tiempo adicional que un vehículo permanece en las vías por fallas, sin ser detectadas en las redes de semaforización; segundo, evitar congestiones al reducir el tiempo de traslado de automotores y peatones de un lugar a otro; tercero, disminuir el tiempo de no funcionamiento de los semáforos de la intersección; cuarto, reducir los accidentes causados por la imprudencia de vehículos y peatones cuando los semáforos no funcionan de forma adecuada; finalmente, disminuir los niveles de estrés a los que se exponen a diario tanto conductores como peatones.
Se han propuesto diferentes estrategias para solucionar problemas como los que se mencionan, algunas se basan en adaptar el tiempo de los semáforos (Sehgal et al., 2010; Chunxiao y Shimamoto, 2012; Salcedo et al., 2006; Pedraza et al., 2012), otras en la interacción entre intersecciones y vehículos (Levinson et al., 2011; Akanegawa et al., 2001), y varias en la inversión de infraestructura vial (Palomas y Alvarez, 2010; Gradilla et al., 2011).
Esto demuestra que se han desarrollado un gran número de soluciones, que deben estar soportadas por una correcta y escalable comunicación entre el controlador de tráfico y la central de monitoreo de tráfico. Actualmente, existen protocolos de comunicación abiertos para los sistemas inteligentes de transporte (ITS), como lo son: UTMC (urban traffic management and control), OCIT (open communicaction interface for road traffic control systems), AENOR/CTN 135-SC4 (normatividad española para sistemas de control y gestión del tráfico) y NTCIP (national transportation communications for ITS protocol) (Velásquez, 2009; Cornet, 2002). Entre los protocolos de comunicación propietarios para los ITS, se destacan los de las arquitecturas: SCATS, RHODES, UTOPIA, MODERATO y el protocolo BEFA 15 (Camacho, 2010). Con el fin de hacer uso de tecnologías más compatibles con las necesidades de las grandes urbes, en este artículo se presenta un prototipo para la comunicación de una red de semaforización, escalable y compatible con protocolos de larga trayectoria y de aceptación universal como el protocolo TCP/IP.
Este prototipo permite el monitoreo de las luces del controlador de tráfico vehicular basado en la norma RILSA (Verlag, 2010), adicionalmente, cuenta con la posibilidad de configurar los tiempos y planes de señales que pueden cambiarse durante las 24 horas del día, siendo compatible con las diferentes clases de semáforos (halógenos, incandescentes y LED).
Desarrollo del sistemaLa figura 1 presenta el diagrama general del sistema, el cual está compuesto por una tarjeta principal, tarjetas de potencia que permiten el encendido de los semáforos y monitorean el correcto funcionamiento de las luces presentes en dicha intersección, una central remota que registra el estado de la intersección por medio del protocolo TCP/IP y, adicionalmente, se maneja un módulo para la detección de vehículos de emergencia que se aproximan a la intersección para dar prioridad a su cruce, modificando temporalmente el ciclo de la intersección.

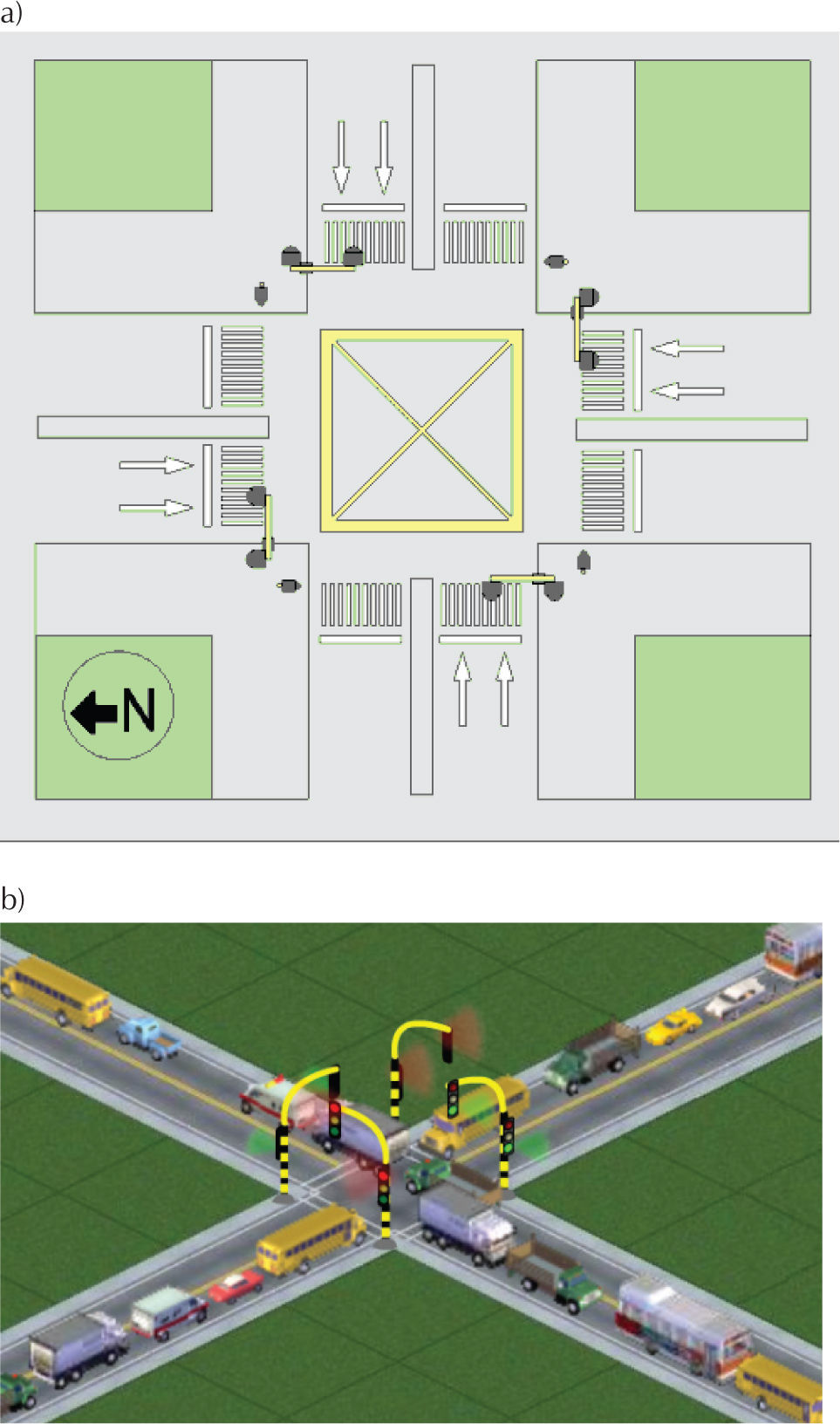
El modelo de intersección planteado es el mostrado en la figura 2, está compuesto por una vía en cada sentido de Sur a Norte y de Este a Oeste, y viceversa. Cada vía presenta un semáforo vehicular doble y dos peatonales en cada acceso a la intersección.
 vista superior, b) simulación vehicular")
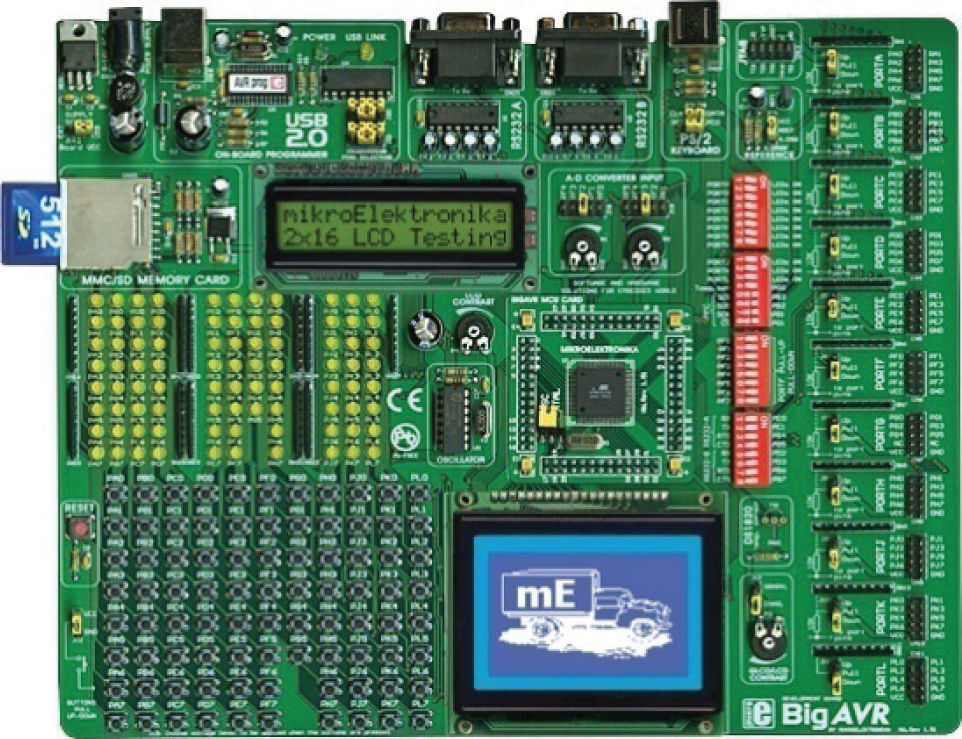
Este modulo se realiza utilizando la tarjeta BigAVR (figura 3), que está compuesta por un microcontrolador de alta gama Atmega 128 de Atmel. Esta tarjeta se escogió para el desarrollo del proyecto, debido a la gran escabilidad y versatilidad que presenta con otros sistemas (Mikroelektronika, 2006).
")
En el microcontrolador de esta tarjeta, se programan los tiempos de duración de las luces de los semáforos de la intersección, aunque pueden ser modificados por la central de monitoreo a través de la comunicación basada en TCP/IP, mediante una tarjeta Serial Ethernet.
En la figura 4 se observa la interconexión entre los puertos de la tarjeta principal y los módulos auxiliares que permiten el control de la intersección, que son: la tarjeta para la detección de los vehículos de emergencia, la tarjeta Ethernet para la comunicación con la central remota, la visualización con la pantalla LCD y la tarjeta de potencia que permite el encendido de las luces del semáforo y la detección de las fallas que se puedan presentar.
Módulo de comunicación
La comunicación entre la tarjeta principal y la tarjeta Ethernet se divide en dos rutinas: la rutina principal y la rutina de recepción/transmisión. A continuación, se explican las funcionalidades de cada rutina.
Rutina principalEsta rutina se encarga de realizar la detección de luces fundidas, el manejo de secuencias de los semáforos y la detección de vehículos de emergencia, para lo cual se establece el diagrama de flujo de la figura 5. Ahí se encuentra una secuencia especial para vehículos de emergencia que permite agilizar el cambio del semáforo a luz verde en caso de detectar alguna señal de alerta. Por otra parte, existe un bloque de destello temporal en luz amarilla, que se genera si se recibe una comunicación de luces rojas fundidas o luces verdes conflictivas. La duración de este destello depende del tiempo que necesite el equipo técnico para solucionar la falla.
Rutina de transmisión y recepción
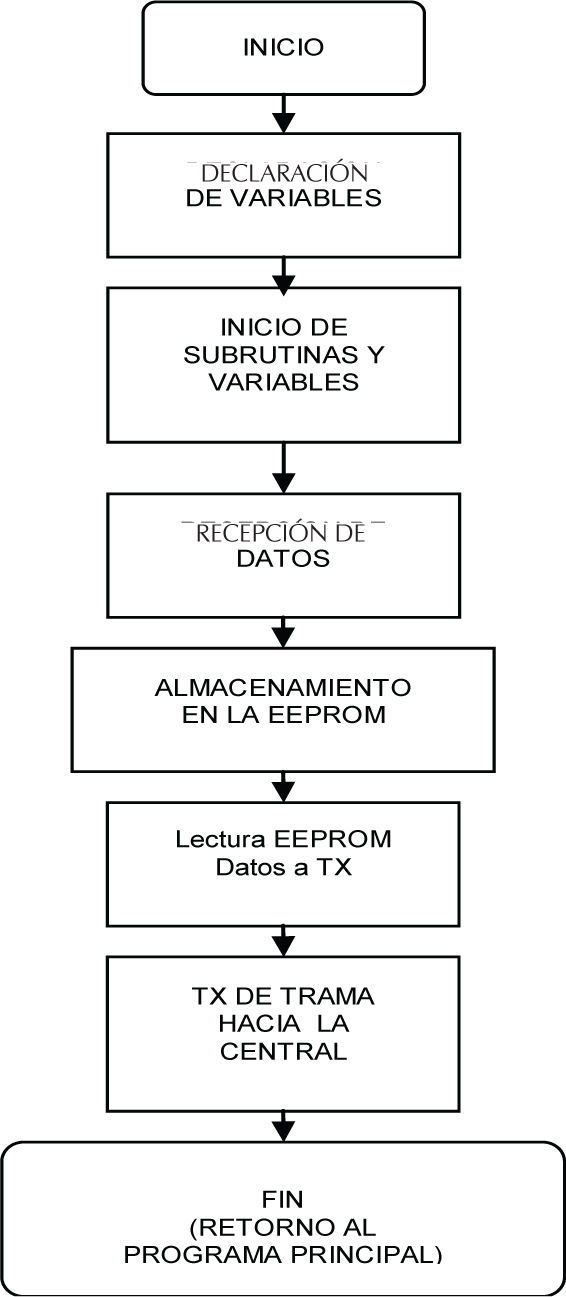
La rutina de recepción/transmisión, como su nombre lo indica, recibe las tramas provenientes de la central de monitoreo y transmite los reportes hacia la misma usando el protocolo TCP/IP (figura 6). Por ejemplo, si una falla se soluciona en un controlador de tráfico, a través de esta rutina se informa a la central para que suspendan las rutinas de seguridad y se inicie, lo antes posible, el funcionamiento normal de los semáforos de la intersección.
Módulo de potencia
Por medio de esta etapa se transforman los estados lógicos provenientes de la tarjeta principal, a los niveles de corriente alterna manejados por las luces de los semáforos (120 VAC) en el caso de los bombillos halógenos, incandescentes y de LED.
El módulo de potencia desarrollado se muestra en la figura 7a, con la que se activan dos semáforos de grupos diferentes (por ejemplo, Norte-Sur y Este-Oeste) a través de los optoaisladores y los Triacs. Por lo tanto, se necesitan cuatro tarjetas en total para una intersección, dos para los semáforos vehiculares y otras dos para los semáforos peatonales.
 para dos semáforos, b) diagrama de interconexión")
Esta tarjeta a su vez, sensa, mediante los transformadores, las luces rojas fundidas y el encendido de los bombillos verdes, lo cual se reporta a la tarjeta principal.
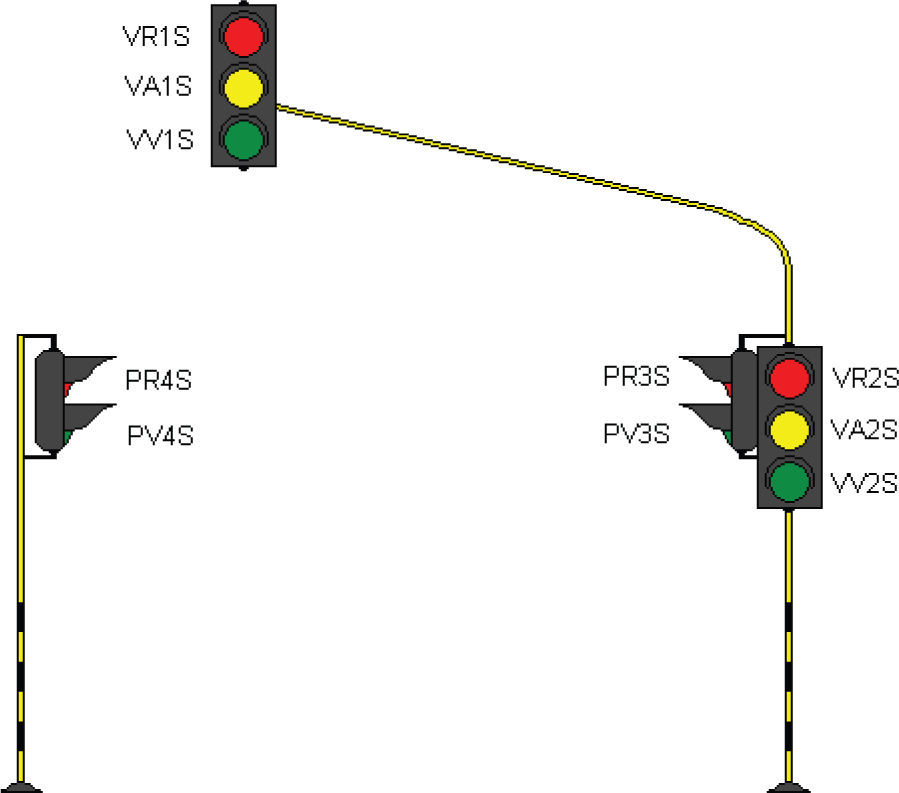
En la figura 7a se observa el diagrama de interconexión entre la tarjeta principal, las tarjetas de potencia y los semáforos de la intersección. En la figura 8 se muestra un ejemplo de la nomenclatura a usar, la primera letra indica el tipo de semáforo: peatonal (P) o vehicular (V), la segunda letra corresponde al color de la luz: Roja (R), Amarilla (A) y Verde (V), posteriormente aparece el número del semáforo y finalmente se encuentra su punto cardinal: Norte (N), Sur (S), Este (E) y Oeste (O).
Etapa de detección de vehículos de emergencia
La detección de vehículos de emergencia se realiza por la emisión de señales de radiofrecuencia generadas desde estos vehículos al aproximarse a la intersección y, por ende, se les da prioridad de cruce colocando la luz de este semáforo temporalmente en verde. Esta etapa se implementa utilizando la frecuencia 433.92MHz, banda libre del espectro radioeléctrico, con un alcance de aproximadamente 120m. Para la intersección planteada (figura 9) se requieren 4 receptores ubicados a cierta distancia del cruce por cada corredor vial, de manera que se detecte el arribo del vehículo por las cuatro entradas al cruce.

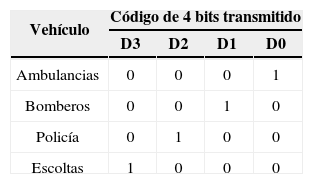
La tarjeta transmisora cuenta con la posibilidad de enviar datos de 4 bits. En la tabla 1, se establecen cuatro tipos distintos de prioridad que permiten identificar el tipo de vehículo de emergencia que se aproxima a la intersección.
Central de monitoreoLa central de monitoreo está implementada en el software Lab VIEW. Permite visualizar el estado de las luces de la intersección de forma remota, así como la administración de los tiempos de las luces verdes y rojas de la intersección. Adicionalmente, desde la central es posible establecer la fecha y hora de las notificaciones desde el servidor y el controlador de tráfico ubicado en la intersección.
En la figura 10 se muestra una secuencia en bloques de las actividades del software de la central. En un comienzo se establece una configuración, donde se determinan características como la dirección IP destino y el puerto, luego se procede a enviar la trama (la cual se describe más adelante) a la tarjeta principal del controlador, después la central queda en espera de la respuesta de la tarjeta principal y luego se toman decisiones a partir de la información recibida en la trama.

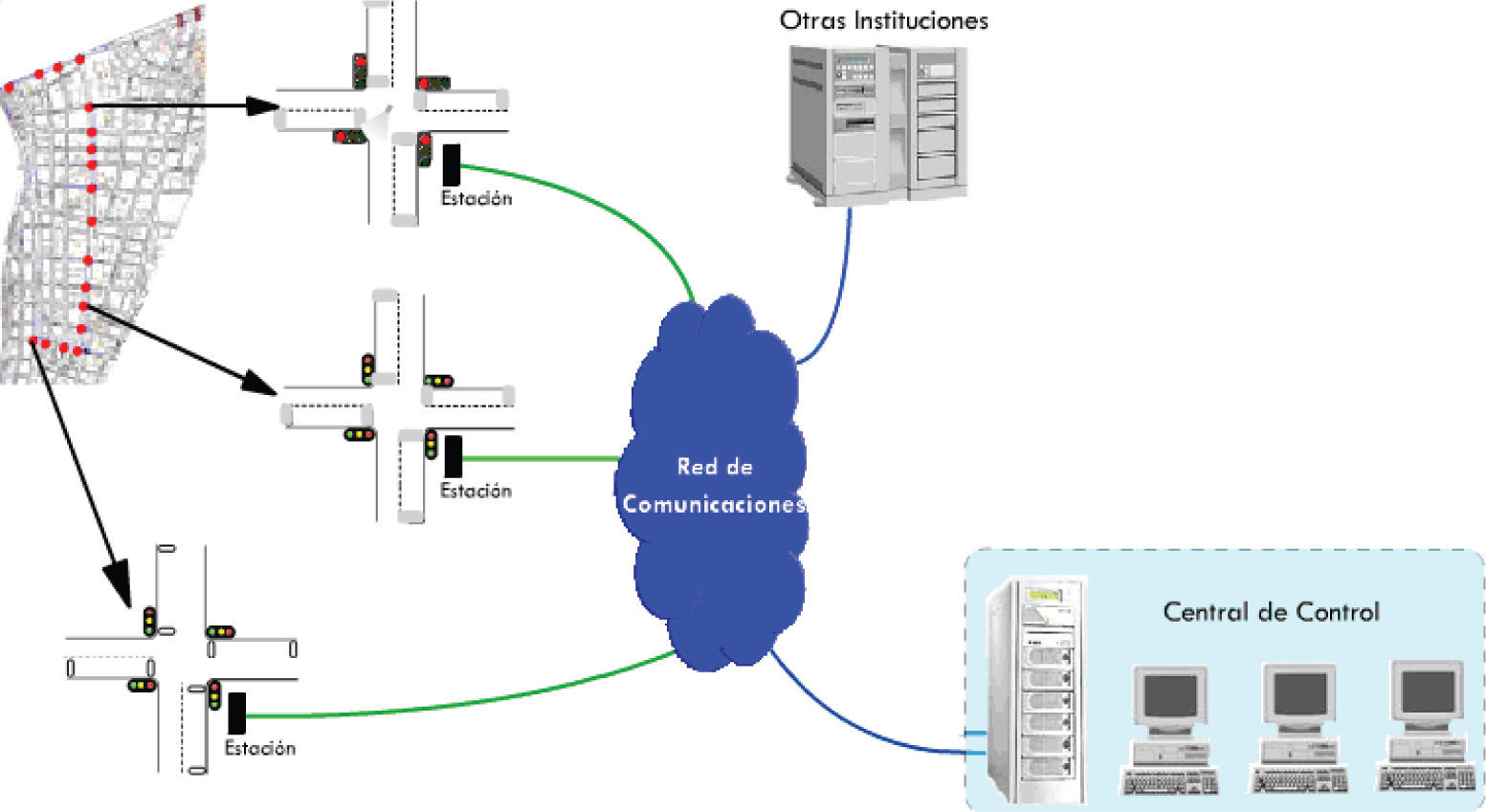
En la figura 11 se muestra el diagrama de interconexión entre la central y los controladores de tráfico de cada cruce, en donde éstos se comunican a través de la infraestructura de un proveedor de servicios de internet o una red TCP/IP dedicada para este fin.

En la figura 12 se muestran los semáforos de los cuatro accesos a la intersección (Norte, Sur, Este y Oeste) visualizados desde la central, de tal forma que si aparecen todas las luces encendidas es porque la intersección se encuentra funcionando correctamente.

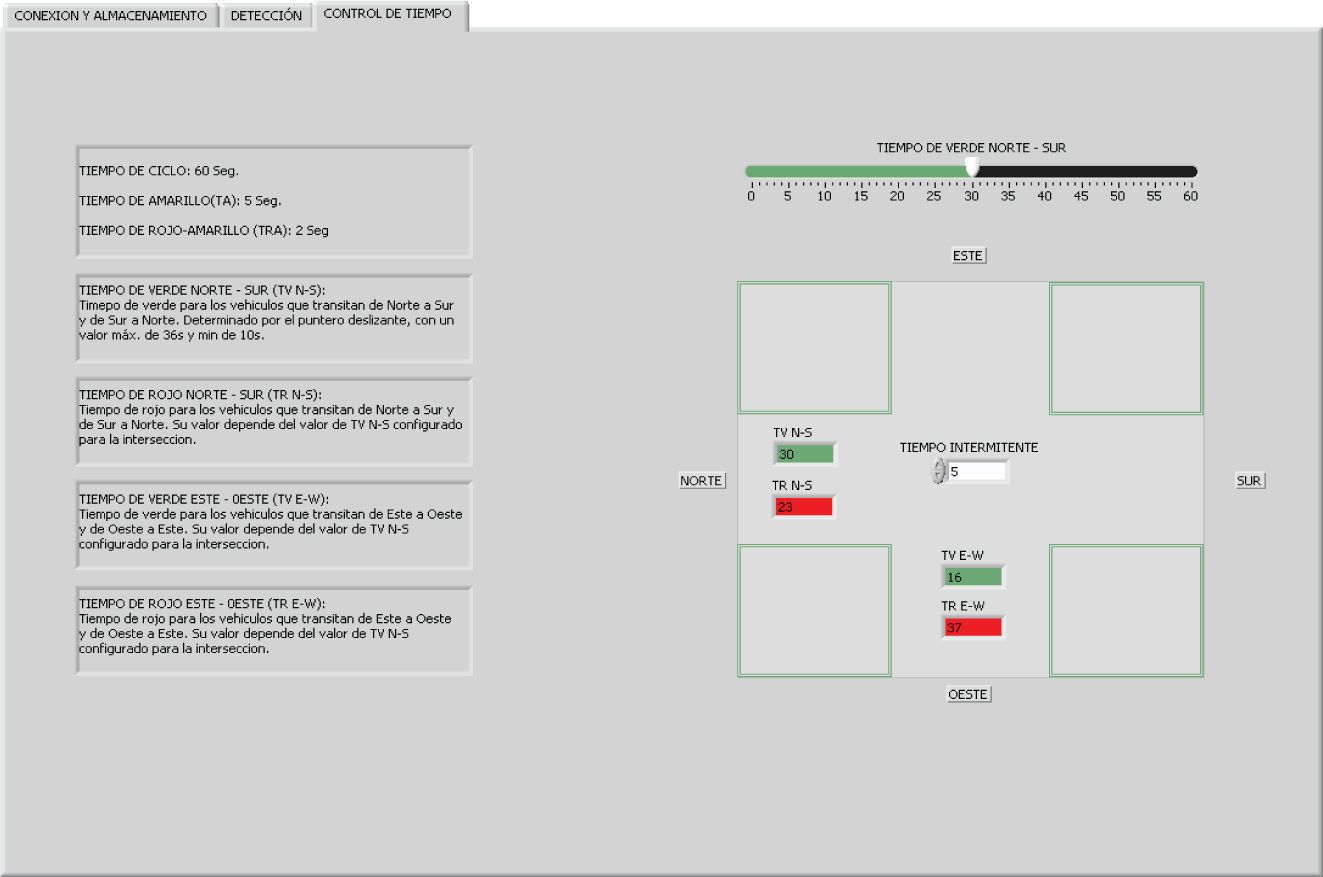
En la figura 13, se especifican las características temporales del sistema, como el tiempo total del ciclo de la intersección y los tiempos máximos y mínimos de la misma, teniendo en cuenta la norma alemana DIN VDE 0832.

El software presente en la central, almacena en un archivo de texto las anomalías que se presentan en el controlador de tráfico, además se realiza un registro cada 10 segundos del estado de la luces de la intersección. En la figura 14, se observa el tiempo en el que las luces de los semáforos vehiculares y peatonales están encendidas, según la nomenclatura de la figura 8.
Configuración de tiempos en la intersección
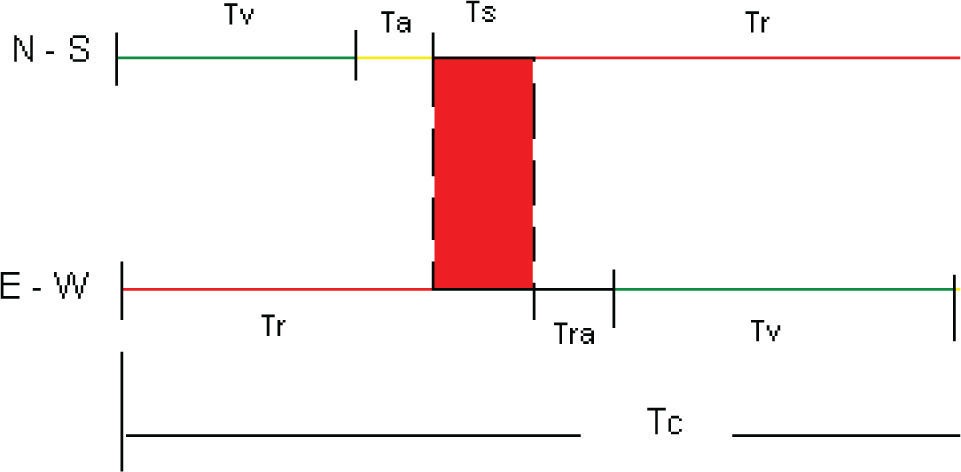
Para la configuración de tiempos de la intersección se tienen en cuenta las recomendaciones vigentes (Verlag, 2010; Alcaldía Mayor de Bogotá, 2005), que sugieren un tiempo mínimo de luz verde de 10 segundos. A partir de este tiempo y teniendo en cuenta el tiempo total del ciclo del semáforo (Tc), que es de 60 segundos, se presenta el diagrama de tiempos para cada vía (Norte-Sur, Este-Oeste) en la figura 15. En esta figura Tv corresponde al tiempo de la luz verde, Ta al tiempo de la luz amarilla, Tra al tiempo de la luz Roja-Amarilla, Tr al tiempo de la luz roja y Ts es el tiempo de seguridad.

El Ts se configura a partir de las características específicas del cruce, como el tamaño de la vía, etcétera. Generalmente este tiempo es de 1 ó 2 segundos. Para los cálculos, este tiempo se escoge de 1 segundo. También se establece Tra=2s y Ta=3s.
Desde la central se envía el Tv Norte-Sur y tomando como referencia el diagrama de tiempos de la figura 15, se calculan los demás tiempos de la siguiente forma:

Manteniendo el mínimo Tv Este-Oeste (TvEW), de la ecuación (1) se obtiene un Tr Norte-Sur (TrNS)=16 s, por lo que el Tv Norte-Sur máximo (TvNSmax)=38 s. De manera que el TvNS configurado desde la central estará entre 10 y 38 segundos.
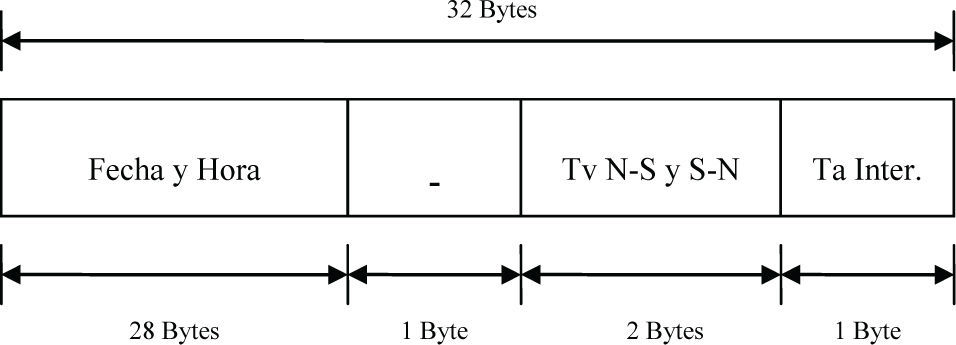
Estructura de la tramaEn el campo de datos de la trama que se envía desde la central de monitoreo a la intersección, al inicio se configura la fecha y hora actualizada de la central, después se establece el TvN-S y por último, se fija el tiempo de luz amarilla intermitente, en caso de que la central determine poner en este estado a la intersección. Esta trama de 32 bytes se observa en la figura 16.

En la trama que se transmite desde el controlador de tráfico hacia la central, se envía información que corresponde a los reportes sobre el estado de la intersección monitoreada. Como se presenta en la figura 17, la trama está estructurada con la fecha y la hora, el estado de las luces con una tamaño de 16 bytes (1 byte por semáforo), y por último se posee un byte para reportar a la central la detección de algún vehículo de emergencia.
Resultados
El prototipo de controlador de tráfico, se muestra en la figura 18, consta de dos tarjetas de potencia para semáforos peatonales y otras dos tarjetas para semáforos vehiculares por cada acceso a la intersección. La capacidad de la conexión de internet entre la central y el controlador de tráfico es de 1Mbps.
Detección de luces fundidas
Luego de realizar el establecimiento de la comunicación TCP/IP entre la central y la intersección, la central verifica el estado de las luces de cada cruce y, además, si las luces rojas se encuentran fundidas, las luces del semáforo de la central se colocan en color negro y la intersección procede a destellar las luces amarillas (figura 19), como indica la recomendación RILSA (Verlag, 2010), hasta que se proceda al reemplazo de las luces fundidas.

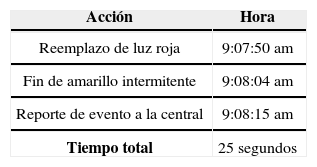
En la tabla 2 se muestran los resultados temporales desde que se funde una luz hasta que se detecta el evento en la central.
Una vez que las luces amarillas de la intersección se encuentran en destello, debido al fallo de una luz roja, se procede a reparar la luz roja y a observar el tiempo en el que se reporta a la central, como se muestra en la tabla 3.
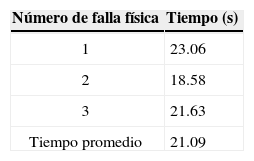
Adicionalmente, se evalúa el tiempo que le toma a la central detectar un error físico en la comunicación, cuando funcionaba correctamente. Se realizaron 3 mediciones en diferentes horas del día, los resultados se muestran en la tabla 4.
Finalmente, en la tabla 5 se presenta el tiempo en que la central detecta la presencia de vehículos de emergencia y el tiempo invertido por parte del controlador de tráfico para asignar la luz verde prioritaria.
Análisis de los resultadosEl corto tamaño de la trama es suficiente para la información que se desea enviar y fundamental para mantener tiempos de comunicación rápidos. Al aumentar el tamaño de la trama para agregar información de identificación y control, también aumentaron exponencialmente los tiempos de comunicación.
Durante varias pruebas realizadas, se observó que el mayor tiempo de detección de una luz fundida por parte de la central fue 36 segundos; sin embargo, esto ocurrió en una hora de alto tráfico de internet en la red de un proveedor de servicios. Aunque este tiempo puede variar dependiendo de factores como la velocidad de conexión a internet, la calidad del medio físico usado entre la central y la intersección, entre otros.
En los errores en conexión presentados en la tabla 4, el controlador de tráfico realizó los cambios de luces de manera autónoma en la intersección con los tiempos que tenia preestablecidos la tarjeta principal, según la hora. Sin interrumpir el funcionamiento de la intersección hasta que la comunicación logró su restablecimiento.
En las mediciones realizadas para vehículos de emergencia en la tabla 5, se observó que el tiempo del reporte de la emergencia no superó el TrEW configurado en ese instante (40 segundos), lo que indica que la prioridad de cambio a luz verde se ejecutó antes de completar la totalidad del tiempo de la luz roja.
ConclusionesAl ser el protocolo TCP/IP un protocolo abierto, proporciona compatibilidad en los controladores de tráfico a nivel de software y hardware, lo que lo convierte en una alternativa ventajosa como protocolo de comunicación en las redes de semaforización para los sistemas de tráfico inteligente de las ciudades, ya que se facilita y agiliza el despliegue de la red de semaforización con varios suministradores a un costo menor que el que ofrecería un proveedor de controladores de tráfico con un estándar de comunicación cerrado.
El prototipo del controlador desarrollado monitorea desde la central el estado de cada una de las luces de una intersección y al utilizar el medio de transmisión de un proveedor de servicios de internet, permite indicar en menos de un minuto la necesidad de reemplazar una luz fundida de un semáforo. Al optimizar el sistema de comunicación de fallas en los controladores vehiculares, se logran correcciones en un menor tiempo y como consecuencia se mejora la movilidad vial.
Para garantizar la seguridad en la información que se transmite sobre la red de semaforización, se recomienda el uso de algoritmos de cifrado y/o mecanismo de autenticación.
Citación estilo Chicago Pedraza-Martínez, Luis Fernando, César Augusto Hernández-Suárez, Danilo Alfonso López-Sarmiento. Sistema de comunicación TCP/IP para el control de una intersección de tráfico vehicular. Ingeniería Investigación y Tecnología, XIV, 04 (2013): 583–594.
Citación estilo ISO 690 Pedraza-Martínez L.F., Hernández-Suárez C.A., López-Sarmiento D.A. Sistema de comunicación TCP/IP para el control de una intersección de tráfico vehicular. Ingeniería Investigación y Tecnología, volumen XIV (número 4), octubre-diciembre 2013: 583–594.
Recibió el título de ingeniero electrónico y magister en ciencias de la información y las comunicaciones de la Universidad Distrital Francisco José de Caldas. Actualmente se desempeña como profesor de la Facultad Tecnológica de la Universidad Distrital Francisco José de Caldas y se encuentra realizando estudios de doctorado en ingeniería de sistemas y computación en la Universidad Nacional de Colombia.
Recibió el título de ingeniero electrónico y magister en ciencias de la información y las comunicaciones de la Universidad Distrital Francisco José de Caldas. Actualmente se desempeña como profesor de la Facultad Tecnológica de la Universidad Distrital Francisco José de Caldas y se encuentra realizando estudios de doctorado en ingeniería de sistemas y computación en la Universidad Nacional de Colombia.
Recibió el título de ingeniero electrónico por la Universidad de Pamplona y el titulo de magister en ciencias de la información y las comunicaciones por la Universidad Distrital Francisco José de Caldas. Actualmente se desempeña como profesor de la Facultad de Ingeniería de la Universidad Distrital Francisco José de Caldas.