






The industrialization of the world, increase in population, slow paced city development and mismanagement of the available parking space has resulted in parking related problems. There is a dire need for a secure, intelligent, efficient and reliable system which can be used for searching the unoccupied parking facility, guidance towards the parking facility, negotiation of the parking fee, along with the proper management of the parking facility. Intelligent Parking Service is a part of Intelligent Transportation Systems (ITS). This paper reviews different Intelligent Parking Services used for parking guidance, parking facility management and gives an insight into the economic analysis of such projects. The discussed systems will be able to reduce the problems which are arising due to unavailability of a reliable, efficient and modern parking system, while the economic analysis technique will help in analyzing the projects' feasibility.
La industrialización del mundo, el aumento de población, el desarrollo de la ciudad de ritmo lento y la mala gestión del espacio de aparcamiento disponible ha dado lugar a problemas relacionados con el aparcamiento. Hay una gran necesidad de un sistema seguro, inteligente, eficiente y confiable que se puede utilizar para buscar el aparcamiento desocupada, la orientación hacia el aparcamiento, la negociación de la tarifa de aparcamiento, así como la correcta gestión de las instalaciones de aparcamiento. Servicio de Estacionamiento Inteligente es una parte de los Sistemas Inteligentes de Transporte (ITS). Este artículo revisa los diferentes Servicios de estacionamiento inteligentes utilizados para la guía, Aparcamiento gestión de instalaciones y da una idea del análisis económico de este tipo de proyectos. Los sistemas descritos podrán reducir los problemas que están surgiendo debido a la falta de un sistema de aparcamiento fiable, eficiente y moderna, mientras que la técnica de análisis económico nos ayudará en el análisis de viabilidad de los proyectos.
The industrial growth of the world is reflected by the increase in the number of automobiles on the streets throughout the world [1], which has caused a lot of parking related problems. The slow paced city planning has increased the problem even more [2]. The search for the parking space is a time consuming process which not only affects the economic activities’ efficiency, but also the social interactions and cost [3]. Network companies cannot provide updated information of the parking facilities on the internet as the parking facilities do not cooperate with the companies. Certain big cars are not able to fit into the normally available parking spaces. Hence there is a need for a system; which can take all relevant information into consideration, for finding the parking vacancy.
Human errors are the major source of traffic accidents, therefore building in-car technologies for checking the parking lot, avoiding accidents and guidance to the parking facility is turning out to be an integral area for research. The objective of such technologies is the reduction of the burden on driver, improvement of the traffic capacity, and provision of reliable and secure car functions [4].
The parking meters which rely on coins or tokens is an inefficient system as it requires man power for management of the parking and exact change for paying the parking charges [2]. Parking control and enforcement systems provide efficient and effective monitoring of meter and it also keeps a check on any violations of the parking lot. This results in best possible use of the parking space for increasing the revenue. However, it requires man power which needs some capital [5]. Currently used parking system is not an efficient one; as the drivers are allowed to park without any restriction [6], and the parking facility cannot be used to its full extent.
The Intelligent Parking service, a part of Intelligent Transportation System (ITS), gives rise to different parking facilities on the basis of new functions they provide. This service not only manages the internal operations of the parking facility, but it is also designed to work with different aspects related to the parking facility.
The services which the Intelligent Parking System should provide in the future are
- •
The parking availability information system and parking reservation system should provide advanced navigation services.
- •
The mobile electric commerce system and a continuously working gate system should collect the toll charges electrically.
- •
An automated navigation system should assist in safe driving.
- •
An in-facility navigation system should provide the best possible traffic management.
- •
Provision of effective security for the safety of cars.
- •
Provision of strong functions for facilitating administrators and managers in management of the parking facility.
The information related to the availability of unoccupied lot; before the driver enters the facility is provided by the parking availability information system. An empty parking lot can be reserved by the driver through the parking reservation system. The continuous entry and exit system facilitates a driver by getting rid of time consuming processes such as getting a ticket, and the freedom of selecting any payment method. The in-facility navigation system is used for finding the vacant lot and then guiding the driver to that parking space.
Further modifications result in even better systems, such as reserving the parking space online and using a smart card with it will help the driver find the destination quickly, safely and easily. Despite the system requiring no man power, it will still be able to know about the entrance and exit of the vehicles as well as the occupancy rate of the facility. These systems will also decrease the traffic congestion as the number of vehicles parked on the street will decrease. These new systems will boost the parking business by the increase in the number of customers [7].
The modern development in technology has also resulted in In-vehicle advanced information systems, which is the standard equipment in the expensive and luxurious cars. These systems consist of cell phones, electronic maps and satellites for navigating the real time situations of road through wireless technologies.
The latest advancement in intelligent parking service is the parking space negotiation system which is much different than the parking information system. Parking space negotiation system uses the linking and integration of the parking facilities which results in negotiation and coordinates between the in-vehicle information system and parking facility. This system initializes the negotiation process for the parking charges, the advance reservation of the parking lot, search for the best possible path from the current position to the parking facility and then to the destination. Coordination work is an important task for the negotiation corporation. Negotiation is just like a business where both sellers and buyers decide the terms of business, for getting the best possible deal for both parties.
The parking information system along with the parking space negotiation system laid the foundation for the intelligent parking service and it can counter all the traffic related issues working hand in hand with each other.
The rest of paper comprises of various methods used for designing an intelligent parking service and will provide an insight into the methodology of economic analysis for such system.
2Various techniques proposed for an intelligent car parking systemSome of the most relevant techniques for realizing an effective Intelligent Parking System are summarized in this section.
2.1Expert systemsExpert Systems or Agent based technologies can solve the problems associated with distributed and complex traffic environment. They are also considered to be the main weapon for laying the foundation of automation mechanism for the Parking Negotiation and Guidance System [8]. Agent has beneficial traits like autonomy, reactivity, adaptability, proactivity and social ability which can be used for solving problems having highly dynamic and interactive behaviors [9].
Multi-Agent system is a modeling technique. It is used for representation of system with elements which show intelligence, autonomy, and degree of interaction either with each other or with environment [10]. Mobile agents can move within the nodes of a network and are made dynamically during the runtime. They are sent to destination systems for performing different tasks with the up to date code and algorithm. Mobile agents also result in reduction of data transmission over the networks. It enhances the system ductility, adjustability and perdurability [11].
Some systems do not provide the best possible parking facility as they do not take the parking fee into consideration. In the absence of the negotiation on the parking fee, the consumers loose the opportunity of finding a cheaper and better parking place [8]. So the negotiable margin on the parking price has to be taken into consideration for making a decision, through the Intelligent Agent System which has to select the best possible parking facility for the driver as described in [3]. The agents are able to plan, move, perform, check and coordinate for performing their tasks. For the provision of a bargaining platform for the user; an intelligent parking negotiation and guidance system, which integrates the mobile agent with multi-system is proposed in [9]. Mobile agent can be used for an active, stable and quick negotiation between cars and parking facilities. The movement of the agent helps in shorter negotiation time and decreases the amount of data to be transmitted over the wireless network. They also present an algorithm for negotiation, which is similar to the negotiations of humans.
A multi-agent system called agent-based intelligent parking negotiation and guidance system (ABIPNGS) combines mobile agent technology with multi-agent systems and utilizes both stationary and mobile agents. The utilization of agents in transportation systems are discussed in details in the literature [8, 12–15].
A multi-phase navigation technique which relies on two-layer traffic map is used for parking routes negotiation and direction in [16]. The system implementation takes place on an extended FIPA architecture through mobile agent, message queue, agent container and agent execution environment. It utilizes the interoperability of FIPA standards and ductility of mobile agents. Through the brilliance, adjustability, and co-action of agents, the entire service environment can automatically perform the search for the park, bargain the parking fee, book the parking lot, negotiate the parking rout and direct to the facility. Distributed active parking guidance information system (APGIS) is discussed in [16]. It supports both the stationary and mobile agent along with automatic execution of searching for park, negotiating the parking fee, booking of the parking lot and directions of the parking route without intervening the drivers and parks
The distributed intelligent motion control of mobile robots is discussed in [17]. It also presents a multi-functional agent system called intelligent system for autonomous robots, which deals with modeling, planning and coordination functions of a mobile robot. The system is made up of main control kernel agent, a learning navigation agent for safe trajectory generation, and allowing the robot to move towards a restricted environment goal. For learning and keeping successful motion of the robot, an adaptive neutral algorithm is utilized. The third agent is concerned with positioning of the robot as well as updating the map for the robot. The fourth agent deals with communication, handling and coordination tasks. Fuzzy maneuvering and Parking Agent, deals with the tasks of parking and movement. A fuzzy maneuvering and Parking agent is concerned with the movement and parking tasks. For outdoor mobile robot navigation, a multi-agent system with event-driven control approach was adapted in [18]. For the sake of fusion of information and mapping of environment, [19,20] propose a distributed multiagent system. Figure 1 shows the ABIPNGS organization model.
2.2Fuzzy logic based systems
If there is a process resulting from the human error, then a system which supports the operator; safely and efficiently is presented in [21]. The system works by
- •
Detecting
- •
Motion Planning, and
- •
Supplying information
Fuzzy theory is used for building the support knowledge and heuristics of the high-level expert human. The method discussed in [4] gives a car the capability to independently drive on different types of roads. It also envisions movements like reverse, parallel parking and three point turns. For automatically getting a functioning car control system, this approach uses a self-training system which benefits from human skills.
For the sake of training and testing, a car driving simulator is combined with the GenSoYager Fuzzy Neural Network. For replicating the built in vagueness of the available information, a Fuzzy Control System is chosen. Then the implementation of the Fuzzy rule-based system takes place upon the neural network architecture. It is the main reason for learning, recalling, generalizing and adapting from the training data. The Neuro-fuzzy system has the ability to reason like human beings as well as it has expert knowledge.
For reduction of the calculation time, an FPGA based fuzzy logic controller (FLC) is presented in [22]. FLC can be utilized for designing an automatic car back parallel which has FPGA based controller. [23] gives a fuzzy approach for control of backward movement of truck and trailer in dynamic environment. This method is then broadened to condition in which truck's pathway has obstacles. In the first case, we assume stationary obstacles. The second condition is mobile obstacles which can make the truck directed to the parking facility. Ultrasonic and 3D vision sensors can be used for identifying proper parking space for parallel parking. The parking is completed due to the intelligence of fuzzy logic, after the driver confirms it. Ultrasonic sensor identifies objects and obstacles longitudinally.
A two-stage scenario called longitudinal and lateral movements is used in [24] for finding the proper parking lot.
2.3Wireless sensor based systemsA number of low cost sensor nodes make up a Wireless Sensor Network (WSN). They arrange themselves for making an ad hoc network through the wireless communication module present on nodes. Different types of sensors, computation units and storage devices are present on each node. For collecting, processing and transmitting information, the functional parts let the sensors to be installed quickly and easily. They have a bright future since WSNs are easily installed in the normal environment and they provide the data for positioning and surveillance. There are two disadvantages associated with the video sensors. The first one is that video sensors are expensive. Secondly, sensors generate huge data at times; whose transmission via the Wireless Network is hectic.
[25] discusses a WSN-based intelligent car parking system. The system consists of low-cost wireless sensors which are installed in a car parking facility. Each parking space has a sensor node for detecting and checking the occupation of the parking facility. Sensor node is used for detecting the status of the parking field, which is forwarded regularly to the database through the installed wireless sensor and its gateway. For performing various management functions such as, finding unoccupied parking lot, auto-toll, management of security and statistic report; the data base is accessed by the upper layer management system. The prototype of the system was implemented using crossbow mote. Nodes are loaded with light, sound and acoustic sensors for the WSN-based car park management system. A wide-area architecture used for pervasive sensing networks is proposed in Irisnet1[26]. This will allow the users for getting the information of available parking vacancies on their ways, through distributed accessing methods. For the detection and recognition of the automobiles, this system uses video cameras, microphones and motion detectors. All the data of the sensors is processed in networking environment, which is then posted on web. This information can then be retrieved by the user from internet. As the data generated by the video camera is huge, a great amount of resources such as communication bandwidth, processing cycles and energy is required for transferring and processing the data. But the mentioned resources are limited in a wireless network.
Wireless network based transportation applications are discussed in Traffic Plus Technology [27] and MIT intelligent transportation system [28,29]. Automobile sensors are installed on both sides of the road and onto the road bed for retrieving the required information of the vehicles. These systems are not architected for car parking management, though they are effective for checking traffic and road condition. The used hardware in these systems is also expensive and complex. For accurate and reliable detection of vehicles in parking facility, the use of magnetic and ultrasonic sensors is proposed in [30]. The modified version of min-max algorithm is used to detect the cars through magnetometers while an algorithm for ultrasonic sensors is also utilized.
There are other solutions as well that focuses on the use of sensor technologies (magnetometers and video cameras, etc) for parking lot applications. However, magnetometers are sensitive to environmental issues; which results in an inaccurate detections at times. We also have to place the magnetometers close to the cars since it measures the change in magnitude and direction of Earth's magnetic field resulting from the presence of the car. Though it's possible in the proximity of the parking lot's entrance; but it's not possible in upper floors as there is no entrance marking and the vehicles also move at a higher speed. The solutions based on video cameras are very expensive and the huge amount of data generated is difficult to be transmitted over multiple hops in a wireless network. These discrepancies and the movement of other objects in a parking space including human beings, reduce the applicability of either magnetometers or video cameras alone for parking lot management. The traffic surveillance system of [31] utilizes magnetometers for detecting the presence of vehicles along with the estimation of the speed of vehicles in the proximity of street intersections and parking facilities. These magnetic signatures help the system classify and re-identify vehicles.
The design and implementation problems of a reliable WSN system using magnetic sensors are proposed in [32]. The magnetic sensors in the parking lots transfers the parking information to the APs on the road sides. The system can find out the unoccupied parking places in real time and then forwards that information to the user. A detection scheme relying on magnetometer signature measurements is proposed in [32] and implemented on Mica2 motes. The use of tiered architecture for the implementation of the car-park management system using the DSYS25z [33] magnetic sensor boards developed by Tyndall [30] is proposed in [34] as part of D-Systems Project [35]. The problems associated with wireless communications in parking lot environment are highlighted, and recommendations of dynamic and robust routing, delayed retransmissions are proposed on the basis of experimental results for overcoming the problems. For multi storied parking lots where ultrasonic sensors are connected through a bus style network for distribution of power and transmission of sensing reports, Sipark PMA [36] is one of the prominent parking guidance systems. The driver, after entering the parking facility, is directed to parking vacancy through the shortest route by the guidance system.
The serious problem of hard installation and power wastage in existing roadside parking system of ITS is solved by a smart roadside parking management system based on sensor network presented in [9]. The sensors present at the nodes are small and they consume low power. They sense the disturbances in Earth's magnetic field for identifying the vehicle. The nodes sleep at regular intervals and are woken up by the internal microcontroller for gathering parking related information and communicating with other sensors. This periodic sleeping also helps in saving power. A general case of implementation is shown in Figure 2.
2.4GPS based systems
The information about the location and availability of a parking space near the destination is provided to the drivers by the current GPS-based vehicle navigation system. The information of the current state of the parking facility is provided. That's why they can't guarantee a parking lot when the driver reaches the facility. A scientific solution based on utilization of the past and current status of the parking lot is proposed in [37]. Poisson process is used for modeling the availability of a parking lot. An intelligent algorithm which helps the driver in choosing the slot with maximum probability of being vacant is presented in [37] as well. Cerreo [38] had a yearlong study on street parking, which focused on different issues concerned with on-street parking namely policy, planning, management and operations. Various methods and different cities were used for demonstrating these issues. It also highlighted different challenges of on-street parking such as peer-to-peer exchange and storage of parking information.
Arnott and Rowse [39] modeled parking into spatial structure, trip generation technology, technology of parking and travel, and stationary-state conditions. The problem with this modeling is that it doesn't take traffic congestion into consideration.
Chon et al. [40] presented a location based system called NAPA (Nearest Available Parking lot Application) (Figure 3). This system helps in locating the parking lots on campus or areas like airports, but it doesn't provide any information about the availability of vacancy.
2.5Vehicular communication systems
[41] proposes a new smart parking technique based on vehicular communication for large parking lots. This scheme provides the real-time parking navigation service, intelligent antitheft protection, and friendly parking information dissemination to the driver. The scheme is called SPARK and is defined by using parking lot RSUs for closely observing and managing the whole parking facility using VANET communication technology. A general implementation can be seen in Figure 4. SPARK scheme makes the following contributions.
- •
It provides real time parking navigation to the drivers for finding the vacant parking space, saving fuel and time.
- •
It provides VANET-based intelligent anti-theft protection. Due to this, all the parked cars at the parking facility are guarded by the parking facility's RSUs. Any car which tries to leave the parking facility illegally will be detected by the RSU.
- •
It arranges friendly parking information distribution service to all the mobile cars.

The parking control and revenue system in big cities are relying on devices such as coins or token based parking meters, which requires exact change and man power for monitoring the parking lots, making it unfavorable. So a more efficient design for automated parking meter and driver assistance is presented in [13]. It is linked to a centralized traffic control authority, which collects all the charges, and also maintains the implementation of parking rules. This system has a number of subsystems namely an Ad-hoc subsystem, a parking gateway subsystem, a vehicle detection subsystem and a video image processor sensor subsystem. There are two classes of cars which are considered by this architecture.
- •
Class 1 vehicles are those vehicles which do not have any embedded wireless system
- •
Class 2 vehicles are those vehicles which have an embedded wireless device with Ad-hoc networking capability.
Every car has a unique Vehicle Identification Number (VID) associated with it. For overcoming the common discrepancies of the existing vision based target parking position labeled methods in dark indoor parking sites, [42] proposes a light stripe projection based free parking space recognition method. For recognition of the 3D information of parking site, light stripe projection method is used. System is able to recognize discontinue points, pivot and opposite site reference points, once the analysis of 3D information takes place. For automatic steering movement during parking operation; a kind of driver assistant system known as intelligent parking assist system is used, which has the following six parts [43]:
- •
Target position designation
- •
Deciding the path
- •
Finding the path
- •
Active steering
- •
Active braking
- •
Human Machine Interface (HMI)
The 3D information of the final position of the car is recognized by the target position designation. Parallel Parking is achieved through the use of range sensors like ultrasonic sensors [44–46] and SRRs (Short Range Radars) [47,48], for finding the free space. Vision based approach is mostly used for perpendicular parking. The high price of scan type laser makes it less favorable for mass production. The low cost ultrasonic and SRR's aren't efficient for finding the slanted free space. Backward monitoring camera has become an essential component of parking assist system for the drivers to monitor on-going parking operation visually [49]. Different methods are used for finding the free space. For finding the 3D information of nearby vehicles, Nico Kaempchen has used binocular stereo [50]. Vision algorithm for designating the vacant lot through parking slot markings' recognition has been developed by Jin Xu [51] and Yu Tanaka [52], and [53–55]. For finding the 3D information of the nearby vehicle, C. Vestri [56] used motion stereo. [57] and [58] have combined HMI based manual designation methods with vision based system by using such automatic recognition algorithms. Unsupervised vision based system for detecting the availability of a lot is proposed in [59]. This approach uses only few frames per second. It is also not very complex to compute. This method has 3 main processing stages.
- •
The pre-processing of raw images captured by camera takes place.
- •
The shadows present in the image are properly attenuated or completely removed while the distortion is also taken care of.
- •
The establishment of correspondence between the stationary cameras and visible parking places takes place. This process takes occlusions into consideration as well.
Then the evaluation of parking place status takes place. An intelligent car searching technique for large parking facilities is proposed in [60]. Cameras are installed on the roads. The recognition of vision related information of car like color, license plate takes place and are then stored in database. Since the license number plate recognition system is not reliable, so for sorting the retrieved results; an intelligent car searching algorithm which relies on the probability of classification of color and recognition of license plate is used. This method was also applied to a large outdoor car parking facility.
In [61] a new system based on image processing is proposed for provision of parking information and guidance. This system has the ability to count the number of parked cars and identify the free lots available. The system uses images for detection of the vehicles. A camera for capturing the reference image is present at the entrance. After the reference image is captured, a sequence of images is captured as well which is then compared with reference image for image matching with the help of edge detection performed through Prewitt Edge Detection operator. On the basis of the percentage of matching, guidance and information is provided to the driver.
2.7Other miscellaneous techniquesA parking reservation service for reserving a vacant parking spot via the internet is proposed in [62]. This system utilizes the internet for a quick and easy search for the vacant lot. By using it together with a smart card, the system also provides recognition and payments services to the driver. In [63], a multilevel driver assistance system for assisting in the parking process is proposed. A parking assistance system along with parking administration system, and employed sensor systems are mentioned as well. A general architecture of a driver assistance system which relies on path planning and Human-Machine interface (HMI) modules is presented as well. [63] also describes both the design of the system's HMI and the parking possibility region-based path planning method proposed for implementation of the presented architecture. A four-wheeled vehicle or welfare vehicle is proposed in [64]. It is a self-propelled, four wheeled electric chair which steers through the steering wheel control. [65] considers a parking method for an independent car in an underground parking facility. This implemented method is decomposed into:
- •
Motion control of the vehicle from the resident to the parking facility on the basis of configuration given by the vehicle owner.
- •
After the car joins the underground parking facility, the searching and examining of a free space in the car park which is followed by operations used for parking movement takes place.
- •
The positioning mechanism which allows the car for keeping the perfect position in the global frame during the whole displacement.
In [66], assistance of a vehicle with mobile guidance system, by measuring the position and heading of a guided vehicle to instruct the steering and velocity of its target, is presented. An intelligent organizer of objects using Genetic Algorithms (GA) and Hill Climbing (HC) for solving the space allocation problem in warehouse, parking facility and the cultivation land is presented in [67]. [67] also implements an organizing technique; which randomly organizes the space, for comparing the results with the intelligent techniques.
The problems of independent parking and obstacle avoidance have been address by the increasing number of carlike mobile robot (CLMR) studies. Convenience can be provided to a novice driver by an autonomous parking controller. However, an inadequately designed controller puts the drive and car in jeopardy. [68] presents a novel multifunctional intelligent autonomous parking controller. It is able to effectively park the CLMR in an appropriate place by using the data of integrated sensor, which has the ability to get the surrounding data of the robot.
An ultrasonic sensor array system which has group-sensor firing intervals is developed as well. A complete contactless sensory coverage of the whole workspace can be provided by using a binaural approach to the CLMR. The posture of the mobile robot in the parking facility can be obtained through proposed heuristic controller.
A wireless based parking service is presented in [6]. It will not only provide intelligent parking services, but it will also eliminate misparking. To provide an intelligent and automatic parking service, the presented system will use sensor technologies along with wireless network. The analysis of the occurrence of misparking in a traditional parking facility is given through the probability model.
3Economic Analysis of Intelligent Car Parking SystemsEconomic analysis is the core study for assessing and exploring the project's feasibility. It plays an important role in deciding whether to start the project or not. Economic Analysis can be used to minimize risks and improve investment efficiency. The role of economic analysis is minimizing the risks and improving the investment efficiency. As intelligent parking service is a part of ITS, it can decrease the impact of uneven distribution of parking in different parking facilities. [7] uses the concepts of traffic impact analysis TIA for utilizing the engineering economy to analyze the advantages of regional parking guidance system. According to [67], the economic analysis aims at:
- •
Reduction of negative impacts of parking services.
- •
Reduction of investment.
- •
Increasing the social, economic and environmental benefits of the parking facility.
One of the widely used economic analysis technique is Cost-Benefit analysis, which relies on discounted value benefits and cost for determination and evaluation of the resource allocation for both public and non-profit sector projects. However, for parking guidance system; we cannot use traditional Cost-Benefit analysis, as it's hard to define and measure the costs and benefits. Also, there are certain assumptions required for cost-benefit analysis which may not exit for PGS. Therefore, for more accurate result; the legitimacy of the estimates must be on the basis of large number of basic data and information.
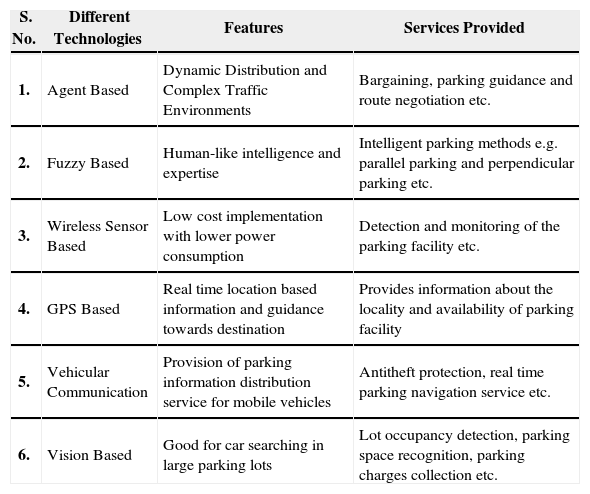
Table 1 gives a summary of the various approaches that have been discussed and highlights their key features.
Summary of relevant techniques for intelligent parking systems.
| S. No. | Different Technologies | Features | Services Provided |
|---|---|---|---|
| 1. | Agent Based | Dynamic Distribution and Complex Traffic Environments | Bargaining, parking guidance and route negotiation etc. |
| 2. | Fuzzy Based | Human-like intelligence and expertise | Intelligent parking methods e.g. parallel parking and perpendicular parking etc. |
| 3. | Wireless Sensor Based | Low cost implementation with lower power consumption | Detection and monitoring of the parking facility etc. |
| 4. | GPS Based | Real time location based information and guidance towards destination | Provides information about the locality and availability of parking facility |
| 5. | Vehicular Communication | Provision of parking information distribution service for mobile vehicles | Antitheft protection, real time parking navigation service etc. |
| 6. | Vision Based | Good for car searching in large parking lots | Lot occupancy detection, parking space recognition, parking charges collection etc. |
In this paper, various systems that provide intelligent parking services are discussed. These systems can counter the parking problems that arise due to the unavailability of a reliable, efficient and modern Parking system. The use of different modern techniques such as Expert Systems, wireless sensor based, fuzzy based, GPS based, Vehicular communication based and Vision based can reduce the parking related issues. Such system can help the economic, social and safety based aspects of the society. It also helps in preserving the environment, fuel and time. The economic analysis can help us find the feasible project so that we can have a better parking system without making the economy suffer. Future work should be done for integrating different technologies together in order to achieve a system which is the most efficient, reliable, secure and inexpensive. The economic analysis should be done both quantitatively and qualitatively. After the economic analysis is done, then the project can be finalized.