









By gaining the place of active and important research area, Content based image retrieval has been proposed in a number of different ways after its inception. In the proposed method, a new angle orientation histogram has been introduced named as Angle Edge Histogram. By applying Pythagorean theory to image, very useful characteristics have been obtained for image matching, search and retrieval. Proposed method has also been compared with existing methods and the results show that it outperforms the existing methods in values of precision and recall and balance of precision and recall. Proposed method receives an average of 94% of precision and 79% of recall rates.
With the wide use of digital cameras, the digital images have come in millions all over the world. These images are monochrome or colored. In the beginning image searching had been performed through text. The entered text is searched in image name or image tags hence called text based image retrieval (TBIR). With the passage of time needs have been changed and trends have been turned to content based image retrieval (CBIR). CBIR system accepts an image instead of text and retrieves the images similar to given image in content. Alternately CBIR is a process of image matching. If strict image matching tends to image recognition that emphasizes on same to same matching, it has vast applications in practice as one is presented in [1] whereas image matching in CBIR refers to somehow matching in shape.Very simple examples for CBIR need are logo search etc. and if an individual has a large number of images residing on hard disk, CBIR is needed for their management and search.
Image content can be its shape, color, texture or spatial layout. Image contents are retrieved from image characteristics known as features including color, shape and texture features. It has been proved that image shape features are most powerful descriptors of image. And usage of detecting images by their texture is not limited to conventional fields of image processing but it is also widely used in industrial domain as discussed in [2]. Edges are very important among image shape features and very helpful in analyzing the visual contents of image. A number of edge tracing algorithms have been proposed among which Canny [3] algorithm is most popular and widely used. Corner matching is also a powerful technique in context of image match estimations [4]. Other methods for image segmentation and according to its contents are also very helpful in categorizing the image in smaller, searchable components as discussed in [5]. However the related work more specific and close to the proposed technique is presented in the following section.
2Related workA lot of research has been done in the field of image content retrieval through edges among which edges with angle orientations is very important. Edge Histogram Descriptor (EHD) [6] is one of the most important and widely used image descriptor based on angular edges histogram but its limitation is that it is not resilient in case of image rotation. SIFT proposed by Lowe [7] is based on key point direction and invariant to image transformations. Computation of key point orientations and gradient combinely make 3D descriptor for image comparison. Angular radial partition descriptor (ARP) performs poor in case of image semantic retrieval based on image classification [8]. Angular orientation partition descriptor (AOP) has been developed to overcome the problems of ARP [9]. It performs better in semantic retrieval for image classification and useful in many computer vision applications. Edge pixel orientation histogram (EPOH) performs better than MPEG-7 EHD and more reliable for image annotations [10].
The organization structure of rest of the paper is as follows: proposed work has been discussed in detail in Section 3 highlighting the designing of descriptor, populating database, image retrieval and search results. Section 4 presents results and discussion and Section 5 concludes the overall method. References are included in Section 6.
3Proposed workThe fundamental steps that any CBIR process involves are given in Figure 1. An efficient and robust CBIR process needs to cope with the challenges at each and every step. Typically features extraction has been considered the most important and powerful part of any CBIR system designed for image matching. Retrieval accuracy has been totally dependent on the strength of algorithm designed for matching the image to declare being similar or dissimilar. In this study a new edge histogram descriptor named Angle Edge Histogram (AEH) has been proposed to retrieve the content of image. After retrieving the images similar to query image, color histogram has been computed and best matching images both in content and color have been presented to the user.
3.1Angle edge histogram (AEH)
Let Q be the query image having dimensions m×n and D be the database image having dimensionsG×H. For everyQ andD there is a centered point denoted by C. C is computed by the following equations:


From this point C horizontal perpendicular and C vertical perpendicular are drawn respectively. This divides the image into four equal parts. Horizontal perpendicular passes from 0° and 180° whereas vertical perpendicular passes from 90° and270°. Now taking these four parts individually, find out their centered points and draw horizontal perpendicular, vertical perpendicular, right diagonal and left diagonal passing from this centered point. Right diagonal passes from 135° and 315° and left diagonal passes from 45° and 225° proceeding in clockwise fashion. Finally thirty two equal right angled triangles are obtained as shown in Figure 2. Each right angled triangle is treated as a separate image as a result of which thirty two images are obtained in the decomposition process. Orientation of these parts consists of:

Each part is a right angled triangle. The side lying on boundary of image has been characterized as base of each right angled triangle. Figure 3 shows an example of decomposed part. Let B be the base, P be the perpendicular and H be the hypotenuse of the right angled triangle BHP. By applying canny edge detector the gradient of BHP is computed as shown in Figure 4.


Applying Pythagorean Theorem on this result in the following equations:



Rest of the edges have been defined as inner edges wheree represents the edge of image. On the basis of this theory four types of edges have been defined; sin, cos, tan and inner respectively. Sin edge has been defined as the edge touching perpendicular and hypotenuse, cos edge touches base and hypotenuse and tan edge touches base and perpendicular else the edge has been characterized to be inner edge. AEH bins consist of three types of bins; global, local and overall. Global bins are thirty two as shown in equation 3, local bins are four consisting of sin edge, cos edge, tan edge and inner edge respectively and overall bins are 128. These bins are shown in Figure 5.

For all search images AEH is computed and values obtained for sine, cose, tane and inner are stored against each image in database. Feature vector consists of 32x4 entries per image in the database. When a query image is given to the system, AEH is computed and compared with the stored corresponding values. Thus for matching two images 128 searches are performed. Selected threshold value is 32. For the image on the whole to be similar, at least 11 global bins must be matched. Euclidean Distance has been used for bins comparison given in the following equations:
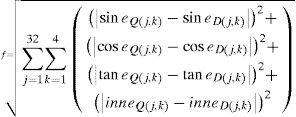
Where J is used for index of query image global bins and k is used for index of search image global bins.

For both images to be similar it is necessary that the value obtained from summing up f must be equal to or greater than 11 as shown in the following equations:
4Results & Discussion
The angle edge histogram (AEH) described in the previous sections has been tested for evaluation of its performance. The system on which experiments have been performed has the following specification: Intel core i3 2.8 GHz processor, 2 GB RAM, Windows 7 OS and Matlab 7.0. Dataset contains a total of 1000 images and 25 categories with 40 images per category. Categories involve animals, plants, oceans, outdoor scenes; waterfall, buildings, flowers etc. and images have been downloaded from various flick groups. Sizes of images vary between 128x128 and 1024x1024 pixels.
Edges have always been very strong features for analyzing the visual content of an image. The proposed approach is very effective against the geometric attacks like scaling, rotation and translation. By using centered point in the process of image decomposition, the method is suitable for different sized images because it always divides the image into equal parts and produces same number of features that is comparable even in case of different sized images. Used angle orientations come up with facing the challenge of rotation that if image is rotated at any angle, the way in which division has been done has the capability to capture the change. The minimum division angle is 450. If rotation occurs, the defined sin, cos and tan edges remain same and no change occurs. Same is in the case of translation; the concerned features of image remain same; therefore, the method is also robust to translation.
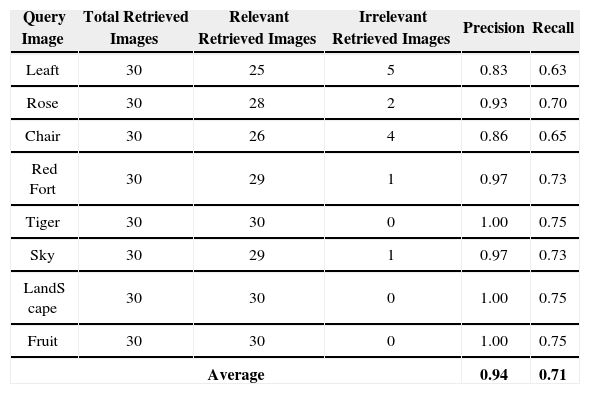
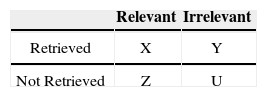
Figure 6 presents retrieved images against the query image given on left. Query image is decomposed; defined features are extracted from the query image like features of search images resident in database in terms of no. of sin, cos, tan and inner edges bins. The most similar images are extracted as retrieved images. To evaluate the proposed method well known and widely accepted Precision and Recall [11] have been used as shown in Table 1. Precision is defined as the measurement of ability of system to retrieve only relevant items whereas recall measures the ability of system to retrieve all relevant items. The concept can be easily understood from the following equations:


.")
Precision and recall rates.
| Query Image | Total Retrieved Images | Relevant Retrieved Images | Irrelevant Retrieved Images | Precision | Recall |
|---|---|---|---|---|---|
| Leaft | 30 | 25 | 5 | 0.83 | 0.63 |
| Rose | 30 | 28 | 2 | 0.93 | 0.70 |
| Chair | 30 | 26 | 4 | 0.86 | 0.65 |
| Red Fort | 30 | 29 | 1 | 0.97 | 0.73 |
| Tiger | 30 | 30 | 0 | 1.00 | 0.75 |
| Sky | 30 | 29 | 1 | 0.97 | 0.73 |
| LandS cape | 30 | 30 | 0 | 1.00 | 0.75 |
| Fruit | 30 | 30 | 0 | 1.00 | 0.75 |
| Average | 0.94 | 0.71 | |||
X ∪ Y is 30 here and X ∪ Z is 40 as each category has 40 images. The system has been set to retrieve 30 images per search; more recall rate can be obtained by increasing the number of images retrieved per search. Comparing the results to other related works demands the image database, image sizes, query images, working criteria and evaluation criteria to be the same that is difficult to achieve in practice. However, despite these problems proposed technique has been compared to some edges histogram based methods as the proposed solution is based on building histogram idea. Average precision and recall rates have been selected for comparison because of the presence of difference in testing environment as mentioned before. Average can give a view of AEH performance over other existing methods. Figure 7 shows the comparison results. The comparison has been performed on query image of building hence retrieving 5, 10, 15, 20, 25 and 30 images per search, recording the precision and recall and computing their average for comparison.

Figure 7 clearly shows that the proposed AEH outperforms ARP, MPEG-7 EHD, SIFT. It performs slightly better than the AOP and EPOH in precision. AOP and SIFT receive high precision rates in case of 5, 10 and 15 number of images to be retrieved; as the number of images increases precision rate falls down. AOP and MPEG-7 EHD have acceptable balance. Proposed method outperforms as it receives 95% precision and 79% recall rate in terms of balance. It can be concluded from this discussion that higher number of relevant retrieved images proves the efficiency and robustness of CBIR system.
5ConclusionsA new method of angle orientation has been presented in this study using histogram. Edges with angle orientation are very effective representation of a visual image. Pythagorean theory has been well utilized in image description. Results prove that the method is very useful and efficient in retrieving true representation and accurate retrieval of image. To maintain the balance between precision and recall, the system has been set to retrieve 30 images per search. The proposed method is resilient to geometric attacks as the experiments have been performed on different sizes, rotated and translated images. Features are easy to calculate and to accommodate in database, therefore, the method is flexible to use in any software and hardware environment.