Valorar la eficacia del sistema Armeo®Spring para la rehabilitación del miembro superior en pacientes crónicos que han presentado un ictus.
Material y métodosVeintitrés pacientes (17 varones y 6 mujeres), con una edad media ± desviación estándar de 54,6±9,5 años, que presentaban una hemiparesia crónica (cronicidad de 328±90,8 días) secundaria a ictus isquémico (n=12) o hemorrágico (n=11), se incluyeron en este estudio. Todos los pacientes completaron 36 sesiones de una hora de duración con el sistema Armeo®Spring y fueron valorados al inicio, al fin y 4 meses después de completar el tratamiento con escalas dirigidas a los dominios de estructura, función y actividad de la Clasificación Internacional del Funcionamiento, de la Discapacidad y de la Salud (CIF) incluyendo: Ashworth Modified Scale, Motricity Index (MI), Fugl-Meyer Assessment Scale (FM), Motor Assessment Scale (MAS), Manual Function Test (MFT) y Wolf Motor Function (WMFT).
ResultadosUn ANOVA de medidas repetidas mostró una mejoría significativa (efecto tiempo) en todas las escalas de función (p<0,01 en FM y MI) y actividad (p<0,01 en MAS, MFT, WMFT-Habilidad y p<0,05 en WMFT-tiempo), sin que se apreciaran cambios significativos en el tono muscular. El estudio post hoc (Bonferroni) mostró un patrón de evolución diferente entre las escalas de función y las de actividad, con un beneficio directamente ligado al entrenamiento, especialmente en las escalas de actividad.
ConclusionesEl Armeo®Spring constituye una herramienta eficaz para la rehabilitación del miembro superior afectado en pacientes con una hemiparesia debida a un ictus, incluso en estadios crónicos.
To evaluate the efficacy of a gravity-supported, computer-enhanced device (Armeo®Spring) for upper limb rehabilitation in chronic stroke patients.
Material and methodsWe included 23 chronic hemiparetic patients (chronicity: 328 ± 90.8 days; distribution: 17 men and 6 women) aged 54.6 ± 9.5 years, who had sustained ischaemic stroke (n=12) or haemorrhagic stroke (n=11). All patients completed 36 one-hour sessions using the Armeo®Spring system. Arm movement was assessed at the beginning and end of the treatment programme and once more 4 months later. Main outcome measurements covered structure, activity, and function, as per the International Classification of Functioning, Disability and Health: Modified Ashworth Scale, Motricity Index (MI), Fugl-Meyer Assessment Scale (FM), Motor Assessment Scale (MAS), Manual Function Test (MFT), and Wolf Motor Function Test (WMFT).
ResultsRepeated measures ANOVA showed significant improvement (time effect) for all function scales (P<.01 for FM and MI) and activity scales (P<.01 for MAS, MFT and WMFT-ability, and P<.05 WMFT-time) without significant changes in muscle tone. The post-hoc analysis (Bonferroni) showed different evolutionary patterns for function and activity measurements, and clear benefits related to Armeo®Spring training, especially on activity scales.
ConclusionsArmeo®Spring is an effective tool for rehabilitating the affected arm in patients with hemiparesis secondary to ictus, even in the chronic stage.
El ictus es la principal causa de discapacidad en el adulto en nuestro país. Diversos estudios señalan que hasta el 86% de los pacientes que sufren un ictus presentarán problemas a nivel sensoriomotor y hasta el 65% tendrá limitaciones para incorporar el brazo hemiparético a las actividades de la vida diaria1,2. De hecho, aunque gran parte de estos pacientes lograrán recuperar la capacidad de deambular, muchos de ellos continuarán teniendo dificultades con el miembro superior3. El tratamiento de estos déficits es especialmente relevante, dado que la severidad de los mismos está significativamente relacionada con el grado de funcionalidad global a medio-largo plazo del paciente4,5.
Varios ensayos clínicos han objetivado beneficios significativos en la recuperación del miembro superior tras distintas aproximaciones sensoriomotoras, incluyendo la movilización repetitiva intensiva6, la terapia por restricción del lado sano7, la estimulación eléctrica funcional8, el uso de entornos virtuales9 o los sistemas robóticos10. Estos últimos se emplean en neurorrehabilitación desde hace más de 15 años con el propósito de recrear las condiciones que propician el aprendizaje motor, facilitando la repetición activa e intensiva de maniobras integradas en tareas significativas. Habitualmente, los robots se asocian a entornos de interacción para aportar significación funcional a las tareas entrenadas, empleando en muchas ocasiones escenarios virtuales con avatares que representan los movimientos del miembro o los objetos con los que el sujeto debe interaccionar.
La funcionalidad del miembro superior, y en concreto de la mano, es versátil y compleja, por lo que el diseño de sistemas robóticos para su rehabilitación requiere múltiples consideraciones11–14. Estas peculiaridades han propiciado la aparición de varios tipos de robots que pueden variar en función de consideraciones técnicas, del segmento del brazo que se entrene o incluso sobre la base de los diferentes modelos de rehabilitación en que se apoye el sistema, entre otros. Así pues, se han publicado distintos estudios clínicos con robots para el trabajo proximal del miembro superior15, para el trabajo distal16, para el abordaje global17,18 o destinados al entrenamiento bilateral19, entre otros. A nivel técnico, según el movimiento que se entrene y la forma de dirigir la trayectoria, podemos distinguir entre sistemas «exoesqueléticos», que engloban y dirigen de forma completa el miembro superior, y dispositivos tipo «efector final», que controlan distalmente el movimiento, dejando libre la organización global del miembro. Finalmente, según el tipo de asistencia al movimiento que proporcionan, se han diseñado robots de movilización pasiva y los sistemas para movilización activa. Hasta la fecha, no existen resultados consistentes respecto a qué tipo de sistema robótico es más eficaz15,20,21, ya que esto va a depender de la situación clínica del paciente. No obstante, siempre que las condiciones motoras lo permitan, es preferible emplear sistemas que propicien la participación activa del sujeto en la ejecución del movimiento. De hecho, la recuperación funcional se obtiene a través de la reorganización cortical dependiente del uso y la participación activa es la que induce una reorganización más fisiológica y aporta mayores beneficios clínicos15,16,22–26.
La eficacia de los sistemas robóticos para la rehabilitación del miembro superior se ha demostrado en pacientes tras diferentes lesiones neurológicas. Sin embargo, existe una ausencia llamativa de estudios centrados en pacientes crónicos, evaluados de acuerdo con el modelo de la Clasificación Internacional del Funcionamiento, de la Discapacidad y de la Salud (CIF)27–30. El objetivo de este trabajo es evaluar la eficacia de un programa de rehabilitación apoyado en el sistema Armeo®Spring en un grupo de pacientes con una hemiparesia crónica tras un ictus evaluados de acuerdo con el modelo CIF.
MétodosPacientesEntre enero del 2009 y enero del 2011, un total de 142 pacientes que presentaban una hemiparesia secundaria a un ictus isquémico o hemorrágico (objetivado por pruebas de neuroimagen) y que fueron atendidos de forma consecutiva en un servicio de neurorrehabilitación especializado, fueron candidatos a participar en este estudio. De esta muestra se excluyó a todos los pacientes con deterioro cognitivo (Mini-Mental State Examination31<23 puntos) o dificultades de comprensión (punto de corte del subtest de comprensión del Mississipi Aphasia Screening Test32<40). Debido a los requerimientos del sistema robótico, se excluyó además a todos los pacientes con movimientos anormales, síndrome doloroso de hombro mal controlado o una rigidez articular en algún segmento del miembro superior y una espasticidad ≥ 2 según la Modified Ashworth Scale33. De la muestra resultante se incluyó en el estudio a los sujetos tan pronto como alcanzaron el mínimo movimiento activo requerido para el uso del sistema, que fue definido por una actividad global del miembro superior≥2 en la Medical Research Council Scale34. La muestra final estaba compuesta por 23 sujetos (17 varones y 6 mujeres), con una hemiparesia crónica secuelar a un ictus isquémico (n=12) o hemorrágico (n=11), una edad media ± desviación estándar de 54,6±9,5 y una cronicidad de 328±90,8 días.
Sistema Armeo®SpringEl Armeo®Spring consta de un sistema de suspensión regulable del miembro superior, integrado en entornos virtuales de diferente complejidad. El sistema de suspensión es un exoesqueleto que abraza el miembro superior de proximal a distal, magnificando cualquier movimiento activo residual del miembro hemiparético en un espacio tridimensional. A nivel distal dispone de un sistema que detecta la presión de empuñadura, pudiéndose ajustar su sensibilidad en función de la situación del paciente. Los entornos virtuales están diseñados para ofrecer distintos niveles de dificultad en diversos parámetros (dirección de los movimientos, velocidad, área de desplazamiento etc.) y ofrecer un carácter funcional a la tarea ejercida. El sistema permite calibrar el espacio de trabajo en función de la movilidad activa que tenga el paciente y es capaz de medir y ofrecer información sobre algunos parámetros del movimiento (resistencia, fuerza, rango y coordinación). Esto permite ajustarse de forma óptima al nivel de dificultad de cada paciente en cada momento de su proceso de recuperación.
IntervenciónTodos los pacientes se encontraban en tratamiento en nuestro servicio antes de iniciar el programa con. El protocolo de tratamiento con Armeo®Spring consistió en 36 sesiones de terapia intensiva. En la primera sesión se ajustaba el sistema a las dimensiones del brazo del paciente y el grado de suspensión necesario para el mismo, de manera que quede aproximadamente a 45° de flexión de hombro y 25° de flexión de codo. Una vez acoplado el miembro superior al sistema, se configuró el espacio de trabajo y se seleccionaron, del abanico de ejercicios disponible, los que el paciente fuera capaz de realizar. A partir de este momento, todos los pacientes realizaron 3 sesiones semanales de una hora de duración hasta completar las 36 sesiones. Las sesiones de trabajo fueron supervisadas diariamente por un fisioterapeuta que ajustaba el plan de ejercicios a la evolución individual de cada paciente. Cada 9 sesiones se realizaban unos ejercicios específicos de valoración que incorpora el software de realidad virtual y se volvía a calibrar el espacio de trabajo y el grado de suspensión.
Durante el tiempo de tratamiento y en el contexto de un abordaje multidisciplinar, los sujetos recibieron otras terapias rehabilitadoras asignadas en función de los déficits que presentaban, siempre y cuando no estuvieran dirigidas al miembro superior. Una vez finalizado el protocolo de intervención, todos los pacientes continuaron con fisioterapia convencional, incluyendo técnicas específicas para la rehabilitación del miembro superior, pero sin participación de sistemas robóticos.
ValoraciónTodos los pacientes incluidos en el programa de entrenamiento con el Armeo®Spring fueron valorados de forma prospectiva por 2 fisioterapeutas expertos en el momento inicial (T1), al finalizar el tratamiento (T2) y 4 meses después de finalizado el mismo (T3), con diversas escalas adscritas a diferentes dominios de la CIF.
1.1.1Dominio de estructuras corporalesEn el dominio de estructuras corporales se eligió la valoración del tono muscular tanto a nivel proximal como distal, empleando para ello la Modified Ashworth Scale.
Dominio de las funciones corporalesEn este apartado se incluyeron los subtests de valoración del miembro superior del Motricity Index (MI)35 y de la Fugl-Meyer Assessment Scale (FM)36.
El apartado de miembro superior del MI valora la fuerza muscular en 3 grupos musculares, incluyendo la prensión, la flexión de codo y la separación de hombro. Cada movimiento se puntúa de forma discreta (0 si no hay movimiento, 9 si el movimiento es palpable, 14 si el movimiento es visible, 19 si el movimiento es contra gravedad, 25 si el movimiento es contra resistencia y 33 si el movimiento es normal), obteniéndose una puntuación total para el miembro superior que oscila de 0 (severamente afectado) a 100 (normal).
La FM valora la movilidad tipo del brazo hemiparético, valorando desde los reflejos y la aparición de sinergias, hasta cada uno de los movimientos aislados de la extremidad superior, incluyendo las pinzas. Esta escala también incluye 3 ítems para valorar la dismetría, la coordinación y la velocidad. La puntuación para cada apartado de la escala es de uno (si no realiza), 2 (si lo realiza en parte) y 3 (si lo realiza completamente), pudiendo alcanzar una puntuación máxima de 66 puntos.
Dominio de las actividades corporalesPara la evaluación de este dominio se empleó la Motor Assessemet Scale (MAS)37, la Manual Function Test (MFT)38 y el Wolf Motor Function (WMF)39.
La MAS es una escala que consta de 9 ítems, puntuables cada uno de ellos de 0 (severamente afectado) a 6 (normal). Para el presente estudio solo se incluyeron los 3 ítems referentes al miembro superior entre los que se incluyen: a) función de la extremidad superior; b) movimientos de la mano, y c) actividad manual avanzada, pudiendo obtener una puntuación de 0 a 18.
La MFT está compuesta por 32 ítems, los cuales examinan los movimientos del brazo, las actividades manipulativas y la combinación de ambas. Cada ítem del test es puntuado como un éxito, cuando el paciente sobrepasa el criterio establecido otorgándole un punto, pudiendo obtener una puntuación máxima de 32 puntos.
Finalmente, la WMFT consta de 17 ítems, de los cuales 15 son actividades cronometradas y 2 tareas de fuerza (estas 2 últimas no han sido incluidas, siguiendo las instrucciones de la escala original40). La habilidad que tiene el sujeto para realizar cada una de las tareas, se puntúa en una escala ordinal (rango: 0-5) que abarca desde la imposibilidad para ejecutarlas (puntuación=1) hasta la normalidad (puntuación=5). Característicamente, todas las actividades de esta escala deben ser realizadas tan rápido como sea posible, de manera que si alguna tarea no se puede realizar se penaliza con un tiempo máximo de 120 s. La puntuación total del WMFT incluye una puntuación global de habilidad (WMFT-Habilidad), así como una puntuación final de tiempo resultante de la suma del tiempo necesario para realizar todas las tareas (WMFT-Tiempo).
Análisis estadísticoPara el análisis estadístico se empleó una ANOVA de medidas repetidas para un solo grupo. Se analizó el efecto tiempo incluyendo la valoración inicial (T1), la valoración al finalizar el tratamiento con Armeo®Spring (T2) y la valoración realizada 4 meses después de finalizado el mismo (T3). El análisis post hoc para detectar diferencias entre los 3 momentos temporales incluidos en el estudio se realizó mediante la técnica de Bonferroni. Se estableció un nivel de significación estadística de p<0,05 para todas las comparaciones. Para este estudio se empleó SPSS para Mac, versión 15 (SPSS Inc., Chicago, EE. UU.).
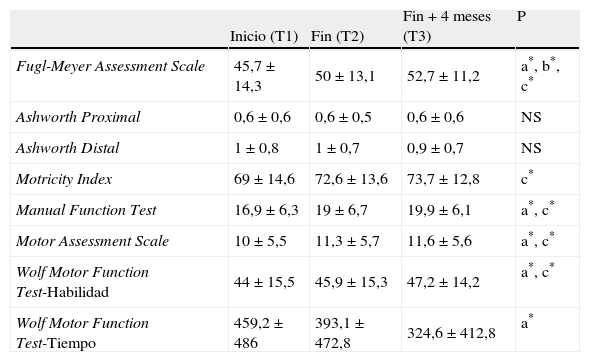
ResultadosTodos los pacientes finalizaron el programa de tratamiento sin que se detectaran problemas de usabilidad ni otras complicaciones clínicas relacionadas con el entrenamiento. El análisis estadístico (ANOVA de medidas repetidas) mostró una mejoría significativa (efecto tiempo) en todas las escalas de función (p<0,01 en FM y MI) y actividad (p<0,01 en MAS, MFT, WMFT-Habilidad y p<0,05 en WMFT-Tiempo), sin que se apreciaran cambios significativos en el tono muscular (Ashworth). El estudio post hoc (Bonferroni) mostró un patrón de evolución diferente entre las escalas de función y las de actividad, con un beneficio directamente ligado al entrenamiento especialmente en las escalas de actividad. En concreto, todos los pacientes mejoraron al final del tratamiento (T1 versus T2) al analizar los resultados de la MFT (p<0,01), MAS (p<0,01) y WMFT-Habilidad (p<0,05). Las mejorías en estas escalas se mantuvieron a los 4 meses de finalizar el tratamiento, sin apreciarse cambios significativos (T2 versus T3). En el caso del las escalas de función, al analizar los resultados de la FM, todos los pacientes mejoraron al finalizar el entrenamiento con Armeo®Spring (T1 versus T2, p<0.01), apreciándose también una leve pero significativa mejoría entre T2 y T3 (p<0,01). En el caso del MI y del WMFT-Tiempo, tan solo se apreciaron mejorías significativas entre el inicio del tratamiento y 4 meses después de finalizado el mismo (T1 versus T3, p<0.05). Los resultados de la valoración clínica a lo largo del periodo de estudio se muestran en la tabla 1.
Resultados en las escalas de valoración en los 3 momentos del estudio
| Inicio (T1) | Fin (T2) | Fin+4 meses (T3) | P | |
| Fugl-Meyer Assessment Scale | 45,7±14,3 | 50±13,1 | 52,7±11,2 | a*, b*, c* |
| Ashworth Proximal | 0,6±0,6 | 0,6±0,5 | 0,6±0,6 | NS |
| Ashworth Distal | 1±0,8 | 1±0,7 | 0,9±0,7 | NS |
| Motricity Index | 69±14,6 | 72,6±13,6 | 73,7±12,8 | c* |
| Manual Function Test | 16,9±6,3 | 19±6,7 | 19,9±6,1 | a*, c* |
| Motor Assessment Scale | 10±5,5 | 11,3±5,7 | 11,6±5,6 | a*, c* |
| Wolf Motor Function Test-Habilidad | 44±15,5 | 45,9±15,3 | 47,2±14,2 | a*, c* |
| Wolf Motor Function Test-Tiempo | 459,2±486 | 393,1±472,8 | 324,6±412,8 | a* |
ANOVA de medidas repetidas con Bonferroni como post hoc.
a: inicio versus fin; b: fin versus fin+4m; c: inicio versus fin+4m; p: significación; NS: no significativo.
*p<0,01.
Nuestros resultados sugieren que el entrenamiento asistido por el sistema Armeo®Spring es eficaz para promocionar la recuperación funcional del miembro superior en sujetos con una hemiparesia leve-moderada en fase crónica tras presentar un ictus, tal y como revela la evolución observada en la puntuación de las escalas empleadas. Nuestros pacientes mostraron una mejoría tanto en las escalas de función como de actividad corporal del miembro superior, sin apreciarse cambios relevantes en el tono muscular. Característicamente, las mejorías observadas lograron mantenerse en el tiempo mientras los pacientes mantuvieron rehabilitación tradicional. Las propiedades psicométricas de las escalas de función aquí empleadas y la especificidad del entrenamiento pueden explicar alguno de nuestros resultados. En el caso de la FM la mejoría de más de 5 puntos de media tras el tratamiento robótico es claramente superior a la experimentada una vez finalizado el mismo. Este cambio, ligado al periodo de tratamiento, se encuentra en el rango del cambio mínimo detectable descrito para ictus crónicos41, frente al experimentado una vez concluido el mismo, lo que refleja la relevancia clínica del tratamiento con Armeo®Spring en este tipo de pacientes. Respecto del MI, el carácter discreto de la medida puede justificar los cambios observados únicamente en el momento de concluir el estudio. En consonancia con diversos estudios27, nuestra población no mostró cambios significativos en el tono según la escala MAS. De los estudios previos revisados, tan solo Posteraro et al.18 recogen una disminución del tono, aunque exclusivamente a nivel proximal. Además, en dicho estudio la muestra incluía ictus y traumatismos, y el periodo de intervención era menor al aquí descrito. Finalmente, la mejoría en funcionalidad observada en las escalas específicas de actividad (WMFT, MAS y MFT) sugieren la implicación del entrenamiento dirigido a la tarea en la mejoría observada42,43. De acuerdo con los resultados del WMFT, mientras que la habilidad parece dependiente del entrenamiento específico de la tarea, el tiempo de ejecución de dicha tarea parece mejorar independientemente del método de entrenamiento empleado. En este sentido, los resultados de estudios comparativos entre protocolos robóticos y no robóticos de igual intensidad y tipo de ejercicios no son concluyentes15,17,19. Algunos autores consideran que los beneficios de la terapia apoyada en robots son, al menos, igual de eficaces que terapias más convencionales. Mientras que otros afirman que existe una tendencia a mejores resultados con determinados sistemas robóticos. Este es el caso de Lum et al.44 que, al comparar un grupo control de terapia convencional con un protocolo asistido por robots, concluyeron que este último resulta ventajoso en términos clínicos y medidas biomecánicas. Finalmente, otros autores anticipan que la combinación de terapia robótica con terapia convencional probablemente sea mejor que cada una por aislado, tanto en parámetros cinemáticos como funcionales12. Probablemente, los estudios que han demostrado la superioridad de los sistemas robóticos frente a la asistencia manual se deban a la uniformidad, velocidad e intensidad de los ejercicios reproducidos con asistencia robótica15.
El motivo de que la terapia asistida por robots como el Armeo®Spring pueda ser eficaz radica en que muchas de sus características facilitan la ejecución de programas de rehabilitación basados en aspectos clave del aprendizaje motor. Los sistemas robóticos como Armeo®Spring promocionan la repetición activa, sistematizada e intensiva de determinados movimientos, y pueden proporcionar un entorno de integración sensoriomotora, con una demanda atencional y complejidad variable. En el caso del Armeo®Spring, la asociación con distintos entornos virtuales aporta una significación funcional a las tareas y un feedback visual aumentado, y permite ir graduando el nivel de dificultad en función de la situación del paciente, lo cual se considera también relevante en el aprendizaje de estrategias motoras. Por otro lado, resulta interesante que la maniobra entrenada de forma repetitiva con el Armeo®Spring es la de alcance y empuñadura, ya que este es un movimiento implicado en muchas actividades cotidianas, y la coordinación interarticular necesaria para ejecutarlo está frecuentemente alterada en los sujetos hemiparéticos45.
Cabe señalar que la muestra en la que se obtienen los resultados descritos es una población de pacientes crónicos frente a la concepción tradicional de que la recuperación neurológica tras un ictus ocurre prácticamente en su totalidad durante los 6 primeros meses46. Estos resultados están en consonancia con trabajos previos con distintos sistemas robóticos destinados al entrenamiento proximal del miembro superior en pacientes crónicos, como el MIT-MANUS27, el ReoGo©47 o el InMotion2©48. Nuestros resultados deben interpretarse con las limitaciones propias de la muestra y del sistema empleado. El sistema Armeo®Spring carece de un dispositivo mecánico robotizado que movilice de forma pasiva del miembro y dirija la trayectoria. Esto, a diferencia de lo que ocurre con la asistencia manual o con robots de movilización pasiva, excluye la participación de pacientes severos sin capacidad de movilización activa voluntaria proximal y de pacientes con movimientos anormales o hipertonía severa. Además, para utilizar el sistema se requiere de un mínimo de actividad motora voluntaria que va a determinar el inicio del tratamiento, tal y como ha quedado reflejado en los criterios de inclusión-exclusión de nuestra muestra. Dado el ritmo de evolución de los avances de la tecnología, es esperable que en un futuro cercano dispongamos de más soluciones terapéuticas para atender al creciente número de pacientes con discapacidades sensoriomotoras de origen neurológico. A modo de ejemplo, el sistema Armeo®Spring acaba de actualizarse dotándose de un brazo robótico que permitirá la inclusión de pacientes con nula actividad motora.
Respecto de las limitaciones propias del estudio, no se comparó con un grupo control, aunque la cronicidad de nuestra muestra y la inclusión de una valoración clínica 4 meses después de finalizar el programa de tratamiento permiten asociar los beneficios obtenidos a la intervención aplicada. Finalmente, en este estudio no se han incluido medidas de participación de acuerdo al modelo CIF. En este sentido, muchos de los grupos de trabajo no han podido demostrar de forma consistente que los cambios obtenidos en escalas funcionales específicas del miembro superior entrenado se traduzcan en incrementos en las actividades de la vida diaria13. En esta misma línea, la última revisión Cochrane49 confirma la eficacia de los sistemas electromecánicos de rehabilitación sobre la fuerza y función del miembro superior parético, pero no sobre las actividades de la vida diaria. Estos resultados se han relacionado con la capacidad de los robots para incentivar el aprendizaje motor de la destreza y no los mecanismos de compensación10,50, frecuentemente implicados en la ejecución de las actividades de la vida diaria13,20,48.
En conclusión, nuestros resultados apoyan la eficacia de los sistemas robóticos en la recuperación del miembro superior parético con una afectación leve-moderada, aun en estadios crónicos. Aunque la base fisiológica que justifica la eficacia de estos sistemas parece evidente, uno de los retos para el clínico es y será identificar métodos y entornos que propicien el aprendizaje motor de forma eficaz en función de las peculiaridades clínicas individuales y el tiempo transcurrido desde la lesión.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.