




Un repaso a la situación actual de nuestros quirófanos demuestra la continua inclusión de nuevos aparatos. La cirugía laparoscópica ha saturado el espacio de la sala de operaciones, creando un sinfín de incomodidades a todo el personal.
La introducción de las nuevas tecnologías en nuestros hospitales facilita la labor diagnóstica y terapéutica al médico, al verse ampliado el abanico de posibilidades, y comporta beneficios para el paciente ya que permite un proceso más rápido y preciso y un acto terapéutico menos agresivo, menos traumático, con una recuperación más rápida y cómoda.
Quizá valga la pena señalar las desventajas que también conlleva su uso, como son el encarecimiento del tratamiento por el coste del material y del personal que debe manejarlo, o la necesaria reorganización del modelo asistencial que conlleva una reubicación de los recursos, incluidos los profesionales. A éstos se les exige el esfuerzo continuado para estar al día, superar las incomodidades derivadas del manejo de instrumentos y aparatos insuficientemente desarrollados y aprovechar estas nuevas posibilidades en la atención a sus pacientes.
La aplicación de la informática y de nuevas vías de comunicación hará que el escenario de nuestras actuaciones varíe, tanto en el aspecto externo como en la composición de los equipos quirúrgicos, en los que personal que actualmente cumple una función asistencial será sustituido por otro especializado en informática, ingeniería, psicología, etc. El futuro permitirá que las máquinas colaboren activamente en el desarrollo de los procedimientos terapéuticos, e incluso lleven a cabo los mismos actos que hoy día realiza el hombre, pero de forma mucho más rápida y precisa, sin el cansancio o el relajamiento y falta de atención, implícitos en la condición humana.
A look at the present situation of our operating rooms reveals the continuous acquisition of new elements. Laparoscopic surgery has filled the available space, creating endless problems of maneuverability for the entire staff.
The introduction of new technologies in our hospitals facilitates the diagnostic and therapeutic work of the physician, broadening the range of possibilities, with the subsequent benefits for the patient, whose treatment is more rapid and suitable and less aggressive. This reduces trauma to a minimum and hastens recovery with the least possible discomfort.
Perhaps it worthwhile to point out the drawbacks associated with its use, such as the increment in expenses, given the cost of the material and staff required, and the needed reorganization of the health care structure, with changes in the adjudication of resources, including funding for personnel. These professionals are obliged to update their skills as new developments are introduced, to overcome the difficulties of learning the management of instruments and apparatuses that are made available in preliminary stages of design, in the attempt to use these novel tools in benefit of their patients.
The implementation of the computer and new modes of communication will lead to changes in both the operating room setting and the composition of the surgical equipment, resulting in the renewal of the present surgical staff with personnel specialized in computer sciences, engineering, psychology, etc. In the future, machines will collaborate actively in the development of therapeutic procedures and will even perform the activities presently carried out by humans more rapidly and precisely, without tiring or relaxing their attention, aspects that are implicit in the human condition.
Introducción
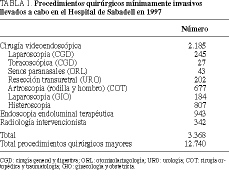
Desde hace 20 años, digestólogos endoscopistas y radiólogos intervencionistas han aprovechado los avances tecnológicos a su alcance para realizar técnicas mínimamente invasivas (MIT), que en la última década han asumido los propios cirujanos con las técnicas laparoscópicas. Muestra de ello se puede comprobar en la tabla 1: se trata de los procedimientos terapéuticos con MIT llevados a cabo en el Hospital de Sabadell durante el año 1997 por cirujanos, con la introducción de la cirugía vídeoendoscópica, por endoscopistas o por radiólogos, que sustituyeron las técnicas tradicionalmente quirúrgicas mediante operaciones a cielo abierto. Las 3.368 intervenciones de MIT corresponden a un 21% del total de actividad quirúrgica de la institución, exceptuando los procedimientos de cirugía menor, los partos y los legrados uterinos. Es decir, en los últimos 10 años ha habido un índice de sustitución de procedimientos tradicionalmente quirúrgicos por técnicas mínimamente invasivas del 21%, muchas de las cuales ya no son realizadas por los propios cirujanos.

La situación actual del quirófano
Los primeros aparatos accesorios que se introdujeron de manera estable en los quirófanos fueron el bisturí eléctrico y las mesas modulares de anestesiología, con el ventilador mecánico y los monitores para el control de las constantes del paciente. Especialidades como la cirugía oftalmológica e incluso la ortopédica ya precisaron quirófano propio hace varios años. Pero para los quirófanos de uso general, al fluoroscopio móvil se ha añadido más tarde el ecógrafo y, en el campo terapéutico, los distintos aparatos para corte y hemostasia, como el cavitrón, el bisturí de argón o el de ultrasonidos. Pero quizás la videoendoscopia ha sido el detonante de la percepción de falta de espacio consecutiva a la aplicación de nuevas tecnologías, así como del cambio en la forma de trabajar: antes, sólo el cirujano y el ayudante veían el campo quirúrgico, mientras que ahora la visión en pantalla ha hecho público el acto quirúrgico. Dejando al margen esta última observación, resulta evidente que habrá que mejorar el diseño de los bloques quirúrgicos para disponer correctamente el armamentario que se ha incorporado y los aparatos que puedan aparecer en un futuro no tan lejano.
Sobre la videolaparoscopia
La cirugía videolaparoscópica fue posible gracias al descubrimiento de la luz fría y de la cámara de vídeo. Las imágenes de los órganos internos se transmiten a un monitor y el cirujano opera siguiendo la imagen en pantalla en vez de hacerlo de la forma tradicional "abierta", mirando a través de una incisión más o menos grande hecha en el cuerpo del paciente.
Podríamos decir que, por ahora, la laparoscopia se ha demostrado útil para el paciente, y suficientemente cómoda para el cirujano, cuando:
1. Se logra abordar un campo quirúrgico relativamente pequeño, al igual que la televisión resulta más idónea para retransmitir una obra de teatro que un partido de fútbol o una película filmada en cinemascope.
2. La mínima vía de abordaje sea diferenciable, en tamaño y en tiempo de exposición, de la laparotomía empleada a cielo abierto.
Las perspectivas más inmediatas en el desarrollo de nuevos dispositivos para la práctica de la cirugía endoscópica abordan tres principales campos de investigación aplicada: mejora de la imagen, de la exposición del campo operatorio y de la maniobrabilidad operatoria.
Sobre la imagen
Una buena calidad de la imagen del campo quirúrgico en el monitor es imprescindible para llevar a cabo una intervención quirúrgica con seguridad. Depende de la iluminación del campo, de la óptica, de la cámara y del monitor1.
Respecto a la iluminación del campo quirúrgico, podemos observar varios aspectos tributarios de mejora: la incorporación de bombillas halógenas de xenón, con una temperatura de luz casi análoga a la solar, generadores con doble salida de haz para el caso de tener que usar simultáneamente dos sistemas luminosos, aparatos que admiten el acoplamiento de accesorios de varias marcas para evitar la incomodidad que representa para los hospitales el uso de dispositivos cerrados que fuerzan al cliente a ser fiel a una casa comercial: aquellos cuyos acoplamientos no permiten el uso de accesorios de otras marcas.
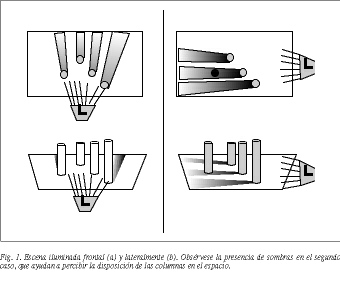
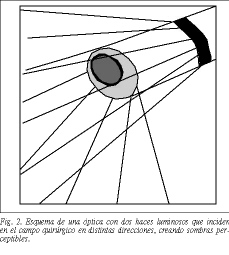
Aun así, la iluminación del campo quirúrgico deja bastante que desear si consideramos que la imagen que percibimos a través del ocular está iluminada en el mismo sentido, pero en dirección opuesta. No hay ser viviente que, viviendo en lugar oscuro, emita una luz frontal y reciba la imagen en el mismo sentido; de aquí la imagen irreal que ofrece una fotografía tomada con la luz de un flash electrónico acoplado al cuerpo de una cámara, para comprender las deficiencias de la imagen endoscópica: no hay sombras que nos permitan componer involuntariamente una imagen tridimensional, que nos faciliten la disposición de los objetos, unos delante y otros detrás (fig. 1). Esto hace que haya detalles que no se aprecien en la pantalla y que solamente pueden ser sospechados por un cirujano avezado, con experiencia previa en anatomía quirúrgica. La introducción de ópticas con doble haz de luz (fig. 2) puede facilitar la solución del problema. Aun así, está claro que la iluminación del campo quirúrgico evolucionará en un futuro próximo para facilitar una imagen más verídica, que facilite el acto operatorio y garantice la seguridad del paciente.


Disponemos de ópticas de gran luminosidad, perfecta definición de la imagen algunos modelos incorporan el chip de la cámara detrás de la lente del objetivo de la óptica, sin distorsión de la imagen, con buena iluminación del campo y esterilizables en el autoclave. Las hay que incluso disponen de sis tema de riego para la limpieza del objetivo acoplado, y últimamente se ha desarrollado un sencillo sistema de calentador de la lente del objetivo2 que evita el empañado (fig. 3).

La introducción de cámaras con 3 chips y digitalizadores nos proporciona un mejor contraste y un perfil más definido de la imagen, al igual que las de alta resolución (HDTV) con 1.200 líneas, todo lo cual reduce la tensión de cirujano. La mejora de la imagen en tres dimensiones (3D), tanto en referencia a su calidad como a la ergonomía de los equipos y accesibilidad económica, es uno de los temas en desarrollo. Quizás, los problemas de peso de las cámaras y de espacio sean los que deban solucionarse en los próximos años, al igual que la necesidad de dos o tres monitores para seguir la operación por parte de todo el equipo, así como la necesidad de tener dos campos quirúrgicos simultáneos, como en el caso del abordaje de la vía biliar principal con un fibroscopio durante una operación por laparoscopia.
Queda otra cuestión en este apartado, que no se suele tratar; se trata de la seguridad en la higiene, de la esterilización o protección de estos aparatos. La esterilización por inmersión en soluciones desinfectantes, aparte de no ofrecer garantías si la inmersión no dura el tiempo suficiente, daña el sellado del objetivo y los forros de plástico de las cámaras y de los cables. El uso del autoclave no es posible con los componentes actuales. Otros métodos resultan lentos o costosos, ya que obligarían a disponer de varios equipos. La solución más empleada hoy día es el recubrimiento con fundas, lo cual resulta práctico y barato, pero no garantiza el aislamiento total.
Sobre la exposición del campo operatorio
Se ha publicado extensamente sobre las consecuencias del aumento de la presión abdominal que tiene lugar con la práctica del neumoperitoneo durante la intervención por laparos copia3. Sin embargo, todos somos conscientes de que no suelen plantearse graves problemas en pacientes sanos y en intervenciones cortas, y, quizás por esta razón, son pocos los cirujanos que emplean dispositivos para trabajar sin o a baja presión. En pacientes con problemas respiratorios estamos obligados a descartar a aquellos en los que la anestesia general y la práctica del neumoperitoneo pueda representar un riesgo añadido innecesario, ante la posibilidad de ser operados bajo anestesia local o locorregional. En estos casos, el uso de suspensores de pared permite ampliar las indicaciones, dado que no se dificulta la ventilación pulmonar mecánica.
Por otra parte, aunque las disponibilidades actuales no son pocas se deberá avanzar en el diseño de instrumentos que suspendan o separen eficazmente las vísceras que circundan el campo operatorio. Hoy por hoy, estos instrumentos son manipulados por un ayudante, pero la tendencia es que sean guiados automáticamente o telemanipulados por el mismo cirujano (base de la cirugía en solitario)4.
Sobre la capacidad de maniobra operatoria
Los principales factores condicionantes en el manejo de los instrumentos a la hora de operar son: el hecho de tener limitada la maniobrabilidad quirúrgica, es decir, la comodidad para acceder al foco operatorio, y el diseño del instrumental. A ello hay que sumar la falta de sensibilidad táctil para el cirujano (hasta ahora, la mano ha sido su tercer ojo).
Los instrumentos empleados en laparoscopia se han diseñado a partir de los convencionales. Hoy día, sin embargo, ya existen terminales con forma propia, y la tendencia es el empleo de materiales que minimicen el diámetro de los instrumentos. La ergonomía sigue siendo motivo de atención. Las nuevas tecnologías han de proporcionar la capacidad de movimientos que suplan las articulaciones de nuestro brazo (angulación, rotación, micromotores guiados a distancia), e incluso la sensibilidad táctil. Los prototipos actuales resultan tan engorrosos de manejar que puede parecer impensable su adaptación al medio quirúrgico.
Los aparatos asistentes para suturas han facilitado su ejecución por laparoscopia y, junto con la introducción del bisturí de ultrasonidos5,6, se ha facilitado un paso más allá de la colecistectomía a muchos cirujanos.
Sobre el entorno quirúrgico
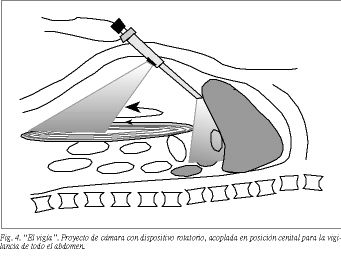
La situación actual de los quirófanos debe cambiar. Al caos seguirá el orden y a las incomodidades constantes, la ergonomía aplicada a todos los elementos de nuestro entorno7. Día a día, el personal del quirófano adquiere experiencia en el manejo de nuevos aparatos. Pero al ritmo que vamos, la presencia de ingenieros y técnicos en el quirófano no será rara, al tiempo que la saturación del espacio y el enredo de cables y tubos por el suelo obligaran a su rediseño global (fig. 4).

Al igual que empleamos el mando a distancia para manejar el televisor doméstico, necesitaremos uno que nos permita manejar la mesa, la lámpara y todos los aparatos que usemos en la nueva era de la cirugía, desde la intensidad del bisturí eléctrico hasta el flujo de un insuflador o el brillo del monitor.
La robótica y la telepresencia
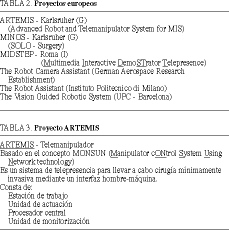
Tres son los principales polos de desarrollo tecnológico en el mundo: EE.UU.-Canadá, sudeste asiático con Japón al frente y Europa. De los programas europeos en marcha destacamos los de la tabla 2 y, de manera especial el proyecto pluridisciplinario dirigido por Buess8,9 para el diseño de un programa quirúrgico de telepresencia (tabla 3). Todos ellos se basan en el uso de brazos mecanizados telecomandados, incluso los hay que responden a las órdenes verbales del cirujano10, o inteligentes, que siguen las órdenes de un programa informático prediseñado. Los resultados obtenidos con nuestro prototipo11 nos hacen pensar que su eficacia para sostener y dirigir el endoscopio u otro instrumento parece clara, si bien su aplicabilidad es todavía cuestionable. De aquí, la posibilidad inmediata de la solo-surgery (cirugía en solitario) que ha demostrado que es posible, segura y eficiente, con el objetivo de suprimir gestos inútiles o sustituir mano de obra no especializada Como ejemplo citemos que un brazo mecanizado teledirigido se alquila actualmente en los EE.UU. por unos 7 dólares por hora.

Los programas de telepresencia, de aplicación discutida por el momento, pretenden que un sistema robotizado reproduzca los movimientos llevados a cabo por un cirujano desde una estación de trabajo, siguiendo los gestos en la pantalla de un monitor.
Para ello se requiere:
1. El diseño de brazos mecánicos que funcionen, parcial o totalmente, guiados por un programa de ordenador.
2. Equipar los instrumentos con sensores de presión.
3. La miniaturización de los instrumentos con la incorporación de micromotores (nanotecnologías).
4. Capacidad de transmitir las señales que definen el movimiento de estos instrumentos, a distancia.
Es muy posible que futuros estudios sobre estas tecnologías aplicadas a la cirugía faciliten la implantación de la telepresencia para operar a larga distancia. Pero la cuestión sigue estando en sus indicaciones. Para algunos países desarrollados, con gran dispersión de la población y difíciles accesos, resulta interesante. Pero, en nuestra opinión, la distancia puede quedar definida por el simple espesor de la pared abdominal. El día en que las nanotecnologías permitan el diseño de un pequeño brazo que pudiera reproducir los movimientos del cirujano dentro del abdomen, se superaría la restricción de maniobra que se presenta hoy día en cirugía laparoscópica.
También la posibilidad de la teleenseñanza a distancia resulta un campo de gran interés en un futuro inmediato12. La fácil comunicación audiovisual e interactiva entre los centros será útil para el aprendizaje de médicos especialistas en formación.
Conclusiones
En cirugía laparoscópica concretamente, quedan problemas importantes por resolver para el cirujano, y de trascendencia para la seguridad del paciente. La limitada visión del abdomen cuando se trabaja con el abdomen cerrado al centrar la visión de la cámara en un campo de actuación reducido, hace que no dispongamos de la percepción visual involuntaria del entorno. Una maniobra intempestiva desapercibida al introducir cualquier instrumento a distancia del campo quirúrgico que ocasione una lesión de una víscera maciza, del mesenterio o del propio tubo digestivo, puede pasar desapercibida. Lograr una imagen en infrarrojos13 simultáneamente en otro monitor que nos muestre constantemente el entorno en el que estamos trabajando nos permitiría tener la seguridad de no dejar pasar por alto una lesión iatrogénica inadvertida (fig. 4). Otro problema principal todavía no resuelto al trabajar por laparoscopia es la prevención y manejo de la hemorragia peroperatoria. Al no poder usar la mano rápidamente con fines hemostásicos es imprescindible considerar todas las medidas preventivas posibles. La implantación de microsensores de flujo en la punta de los instrumentos podría ser otra medida de seguridad a adoptar en cuanto se diseñen.
Así pues, debemos ser conscientes de las limitaciones de la tecnología. Estamos obligados a ser muy sistemáticos y analizar cada movimiento al detalle, con el fin de evitar situaciones difíciles que alarguen la operación o la hagan peligrosa. Hoy por hoy, el cirujano debe:
1. Tener suficiente habilidad en ambos tipos de cirugía, la abierta y la endoscópica.
2. Tener un buen conocimiento de la anatomía del abdomen.
3. Disponer de una imagen con el mejor color y definición en el monitor.
4. Disponer de una buena exposición del campo quirúrgico.
5. Llevar a cabo una meticulosa disección de los elementos.
6. Suficientes accesos para insertar los instrumentos en el momento oportuno.
7. Disponer de los instrumentos necesarios para llevar a cabo la operación.
Las ventajas de las innovaciones tecnológicas van enfocadas principalmente al paciente. La menor agresión terapéutica debe permitir reintegrarse a sus actividades más precozmente y, por otra parte, disminuir el riesgo de contraer infecciones por hospitalizaciones prologadas. Este hecho es especialmente relevante en los pacientes de edad avanzada, que podrán reinsertarse antes a su entorno habitual. Para el profesional ya formado supone un esfuerzo por el hecho de tener que adaptarse a nuevas maneras de hacer las cosas, a cambiar sus hábitos14. Aun así, resulta relativamente fácil comprender la robótica complementaria, es decir, la que colabora con el profesional y que puede emplearse para actuaciones menos cualificadas.
Aunque resulte difícil de imaginar en el ámbito de la cirugía abdominal, los robots tienen una creciente implantación en la cirugía ortopédica. Utilizando sistemas de diagnóstico por la imagen, como escáner o la resonancia magnética, se pueden obtener imágenes digitalizadas en 3D que permiten operar virtualmente al paciente determinado. La operación perfecta es grabada en un soporte y luego reproducida por un sistema mecánico robotizado.
Asimismo, la aplicación de la informática y de nuevas vías de comunicación hará que el escenario de nuestras actuaciones varíe tanto en el aspecto externo como en la composición de los equipos quirúrgicos en los que personal que actualmente cumple una función de asistencial será sustituido por otro con conocimientos en informática, ingeniería, psicología, etc.

