





Introducción
Hace casi 20 años, la colecistectomía laparoscópica modificó de manera radical la forma en que los cirujanos generales consideraban la cirugía. En aquel momento, se introdujeron en cirugía 3 ideas radicalmente nuevas: que el tamaño de la incisión influye realmente en la evolución del paciente; que la cirugía debe ser una actividad multidisciplinaria y que la tecnología desempeña un papel importante en la potenciación de la capacidad del cirujano. El abordaje NOTES constituye una expresión lógica de estos conceptos debido a que es una técnica poco invasora, se lleva a cabo necesariamente en equipo y utiliza la tecnología de manera intensiva1,2. Mediante la combinación de los 2 abordajes convencionales de la cirugía guiada mediante imagen (la endoscopia con instrumento flexible y la laparoscopia), la NOTES tiene el potencial de incrementar el espectro de actuación de estos abordajes, lo que posiblemente va a redundar en un efecto beneficioso para los pacientes. Actualmente, la tecnología NOTES está generando un gran interés y una investigación exhaustiva por parte de los cirujanos y la industria de los dispositivos médicos. Muchos grupos de investigación están en una fase de desarrollo rápido respecto a la introducción de tecnologías avanzadas que permitan que la cirugía «sin incisión» se convierta en una realidad3.
Métodos
El desarrollo de la tecnología avanzada que permita una práctica segura y sistemática de la cirugía transluminal va a requerir la implementación de iniciativas conjuntas entre los investigadores quirúrgicos y los ingenieros. En la actualidad hay varios "equipos" de este tipo que están trabajando en la tecnología NOTES, tanto en el desarrollo de los instrumentos como en el diseño de los procedimientos y en la evaluación de los efectos que este nuevo abordaje tiene en los pacientes. Los equipos citados están trabajando con un proceso de evaluación de necesidades (como la desconstrucción del procedimiento objetivo), el inventario de la tecnología actual y la evaluación y el desarrollo de nuevos dispositivos. A pesar de que los ingenieros son quienes realizan la mayor parte de este trabajo, los cirujanos también desempeñan un papel clave en el proceso. El cirujano debe determinar cuáles son los procedimientos con más posibilidades de practicarlos mediante cirugía transluminal, cuáles son los obstáculos clínicos que superar y cuáles son las herramientas específicas para realizar la intervención quirúrgica con seguridad. Los ingenieros ofrecen una aportación clave en esta fase, pues son los que crean los conceptos y desarrollan prototipos utilizables; quizá su aportación más importante sea la realización "sobre la marcha" de correcciones en los dispositivos para resolver los problemas clínicos que se plantean durante las fases de evaluación y aplicación de los prototipos en condiciones de laboratorio. En este artículo se expone algunos ejemplos de nuestra propia experiencia en el desarrollo de la plataforma NOTES, con objeto de ilustrar la metodología utilizada.
Resultados
El desarrollo de la tecnología NOTES en nuestro laboratorio se inició en 2003. Las primeras iniciativas estaban dirigidas a las intervenciones de resección de grosor completo y ulterior cierre endoluminal. Al principio se utilizaban herramientas endoscópicas convencionales para la apertura y el cierre, así como para el control de complicaciones como las hemorragias (tabla 1). Al poco tiempo se hizo evidente que las herramientas endoscópicas flexibles convencionales eran insuficientes para la realización de intervenciones "quirúrgicas" más agresivas y que era necesario desarrollar nuevas plataformas e instrumentos para usarlos una vez que el endoscopio se introducía en el abdomen.
Tal como ya se ha mencionado, nuestra primera tarea fue definir un procedimiento NOTES objetivo para el desarrollo de nuestra tecnología. En la bibliografía se han mencionado varios posibles procedimientos (ligadura de trompas, reparación de hernia, biopsia hepática, peritoneoscopia de estadificación, esplenectomía, gastroyeyunostomía), pero en el contexto clínico sólo se ha llevado a la práctica la apendicectomía. Nuestro grupo seleccionó la colecistectomía por NOTES como procedimiento objetivo conceptual, pues conlleva la extirpación de un órgano, tiene la complejidad suficiente para poner a prueba la tecnología y es un procedimiento con "perfil" de volumen alto que puede hacer que la sociedad demande la tecnología NOTES como alternativa a las técnicas actuales. En la tabla 2 se definen los componentes clave del procedimiento, así como la función que se requiere de los instrumentos.
Hay varios componentes clave de los procedimientos NOTES que se han identificado como prioridades de desarrollo: endoscopios avanzados, instrumentos que permitan una actuación más agresiva y dispositivos de aproximación tisular tanto para el cierre de la enterotomía como para la práctica de otras técnicas quirúrgicas avanzadas4. Muchos grupos de investigación están trabajando activamente para conseguir soluciones a estos problemas. Junto con ingenieros de la industria (USGI, San Capistrano, California, Estados Unidos), en nuestro laboratorio hemos desarrollado las posibles soluciones a estos problemas, que se exponen a continuación.
Endoscopios flexibles avanzados
Los endoscopios flexibles actuales son insuficientes para la realización de procedimientos quirúrgicos reales, puesto que requieren que el endoscopista se concentre en su objetivo y utilice una o ambas manos para mantener la posición. Ofrecen horizontes visuales fijos que fuerzan al cirujano a ajustarse a proyecciones de visualización inclinadas o invertidas. Característicamente, poseen sólo un canal de acceso, lo que quiere decir que sólo se puede utilizar instrumentos de tamaño muy pequeño, como las pinzas de biopsia. La insuflación con el dispositivo de hinchamiento endoscópico no está regulada e inadvertidamente pueden generarse presiones intraabdominales muy elevadas. Las posibilidades de succión son escasas debido al pequeño tamaño del canal de trabajo. Además, no es posible la triangulación de los instrumentos de operación. Estos problemas pueden resolverse en cierta medida por la experiencia con el instrumento y la modificación del abordaje quirúrgico. No obstante, consideramos que una solución mejor a largo plazo sería el cambio del diseño del dispositivo de acceso endoscópico en sí.
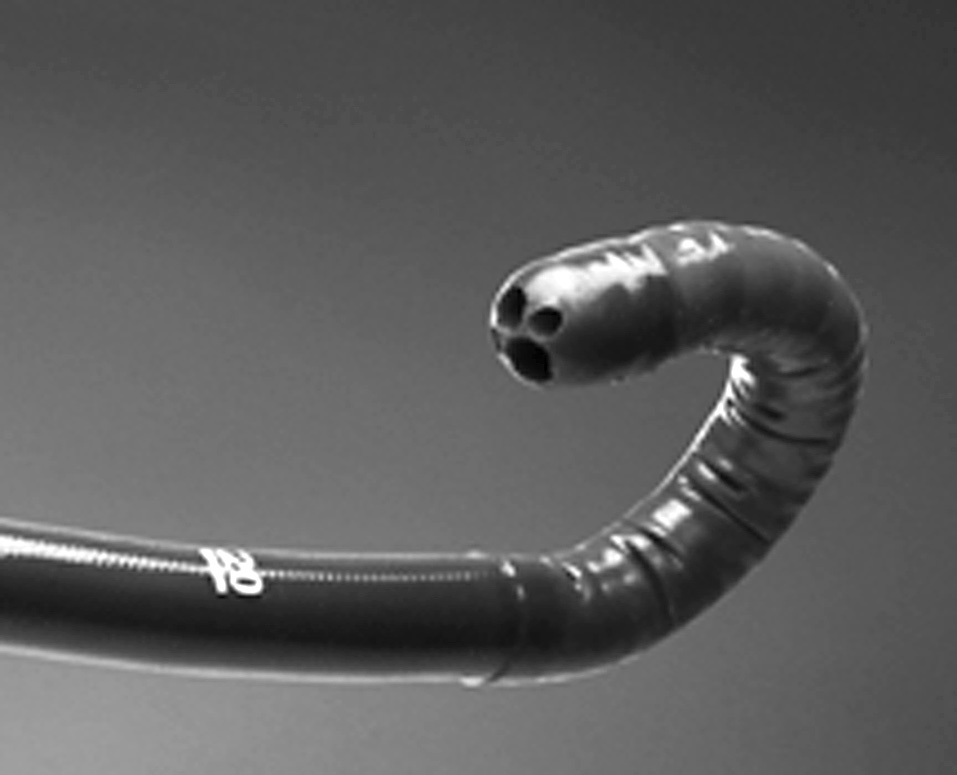
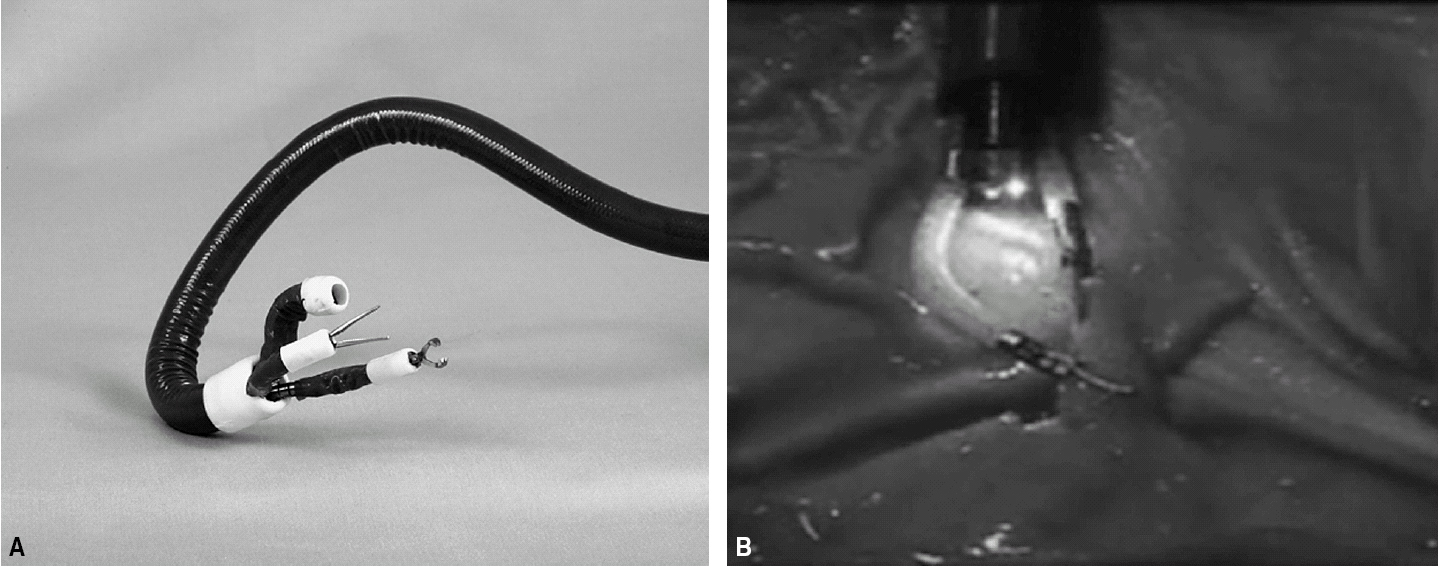
Algunos de los problemas citados quedan resueltos por diversos prototipos de endoscopios, como los dispositivos Transport y Cobra (USGI Medical, San Capistrano, California, Estados Unidos), el endoscopio "R" (Olympus) y el dispositivo robótico Endovia (Hansen Medical). Los sistemas Transport y Cobra implementan un diseño ya existente de un sobretubo de fijación (Shapelock, USGI) que incrementa el direccionamiento independiente de la punta del instrumento, además de que poseen 4 canales y una conexión para el dispositivo de insuflación. El sistema Transport tiene 4 canales de gran calibre (uno de 7, otro de 6 y 2 de 4 mm; fig. 1). Uno de los canales está diseñado para fijar en su posición un endoscopio flexible convencional de 6 mm. Tras ello, este segundo endoscopio se puede girar para corregir el horizonte de visualización, con independencia de la posición del endoscopio más grande. Una vez que se introduce en la cavidad peritoneal, este "endoscopio" flexible de 18 mm se puede girar hacia atrás para colocarlo en la proximidad del órgano de interés y también se puede mantener fijo en esta posición mediante una palanca. La punta del instrumento todavía se puede mover independientemente en 4 direcciones para facilitar la realización de maniobras quirúrgicas finas. La posición fija permite la elevación de los órganos y la realización de manipulaciones tisulares de carácter agresivo. La conexión de insuflación permite el uso de un dispositivo laparoscópico de insuflación convencional con regulador de presión. Los canales de 6 y 4 mm facilitan la introducción de una nueva generación de herramientas quirúrgicas flexibles. El diseño de los dispositivos Cobra y Endovia persigue fundamentalmente el objetivo de la triangulación, una característica que muchos investigadores consideran esencial (fig. 2). El endoscopio "R" es un instrumento endoscópico del tamaño tradicional, con un punto de flexión extra que permite colocar mejor la punta, además de 2 canales de acceso (3,8 mm) con elevadores horizontal y vertical que ofrecen una simulación razonable de la triangulación (fig. 3).
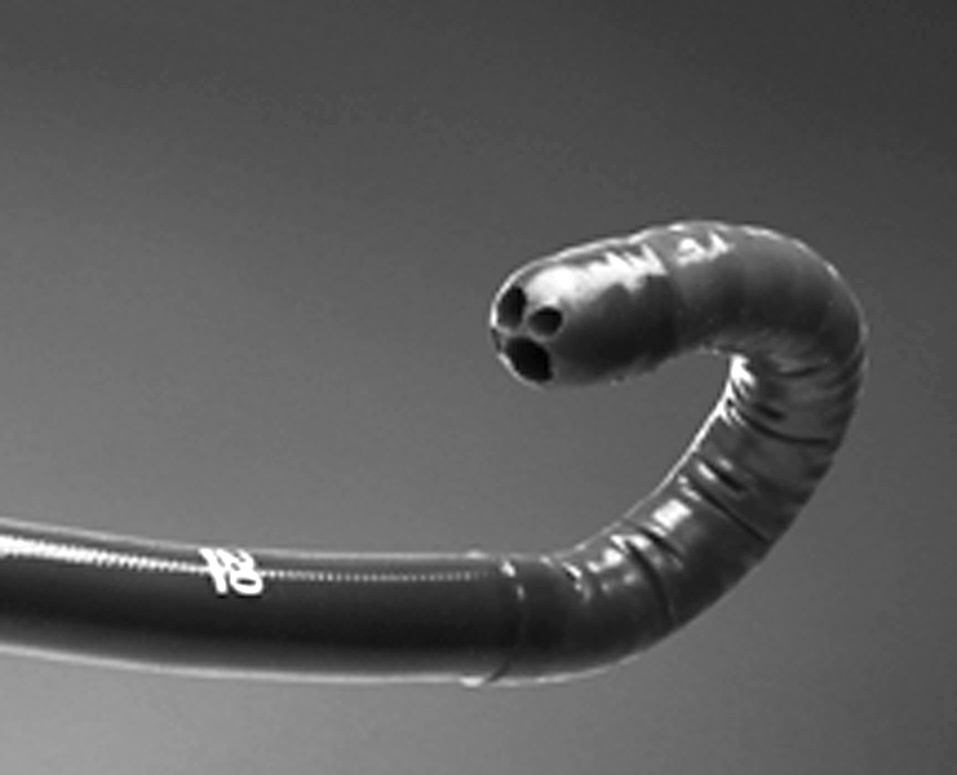
Fig. 1. Dispositivo de acceso multicanal Transport para la tecnología NOTES.
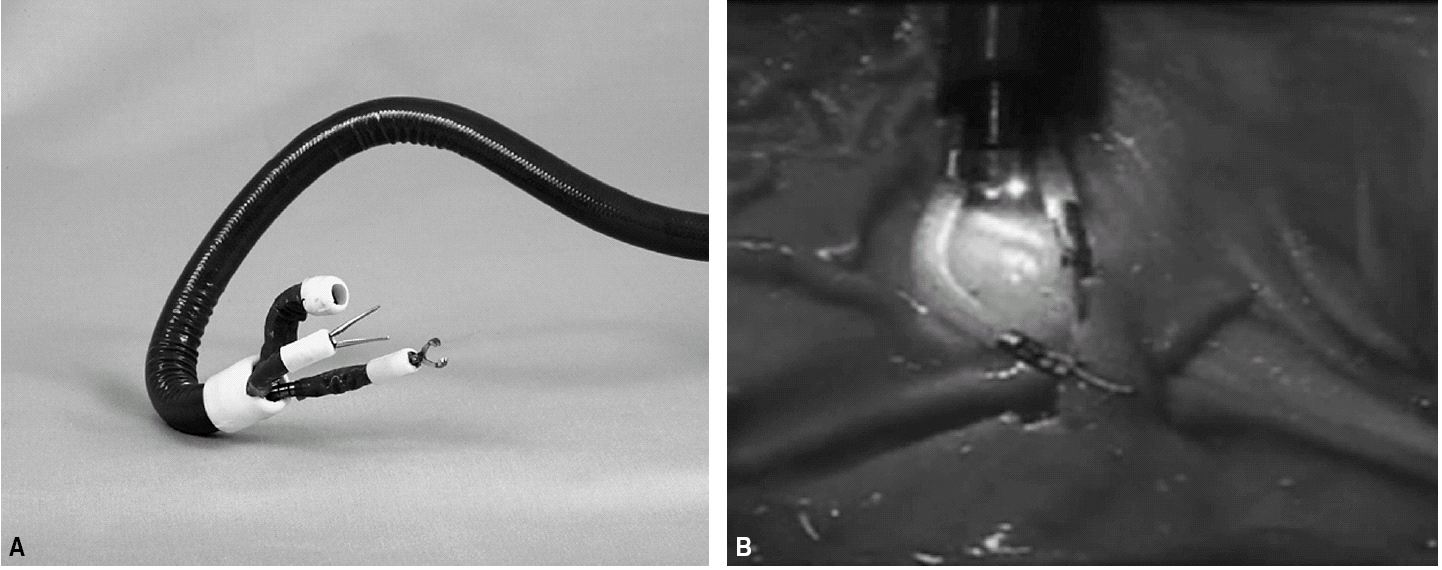
Fig. 2. La triangulación se consigue con endoscopios que presentan brazos controlados por mecanismos independientes. a) Cobra; USGI Medical, y b) Endovia, Hansen Medical.
Fig. 3. Endoscopio "R" (Olympus) que permite una seudotriangulación mediante el uso de elevadores en los 2 canales del endoscopio.
Instrumentación más agresiva
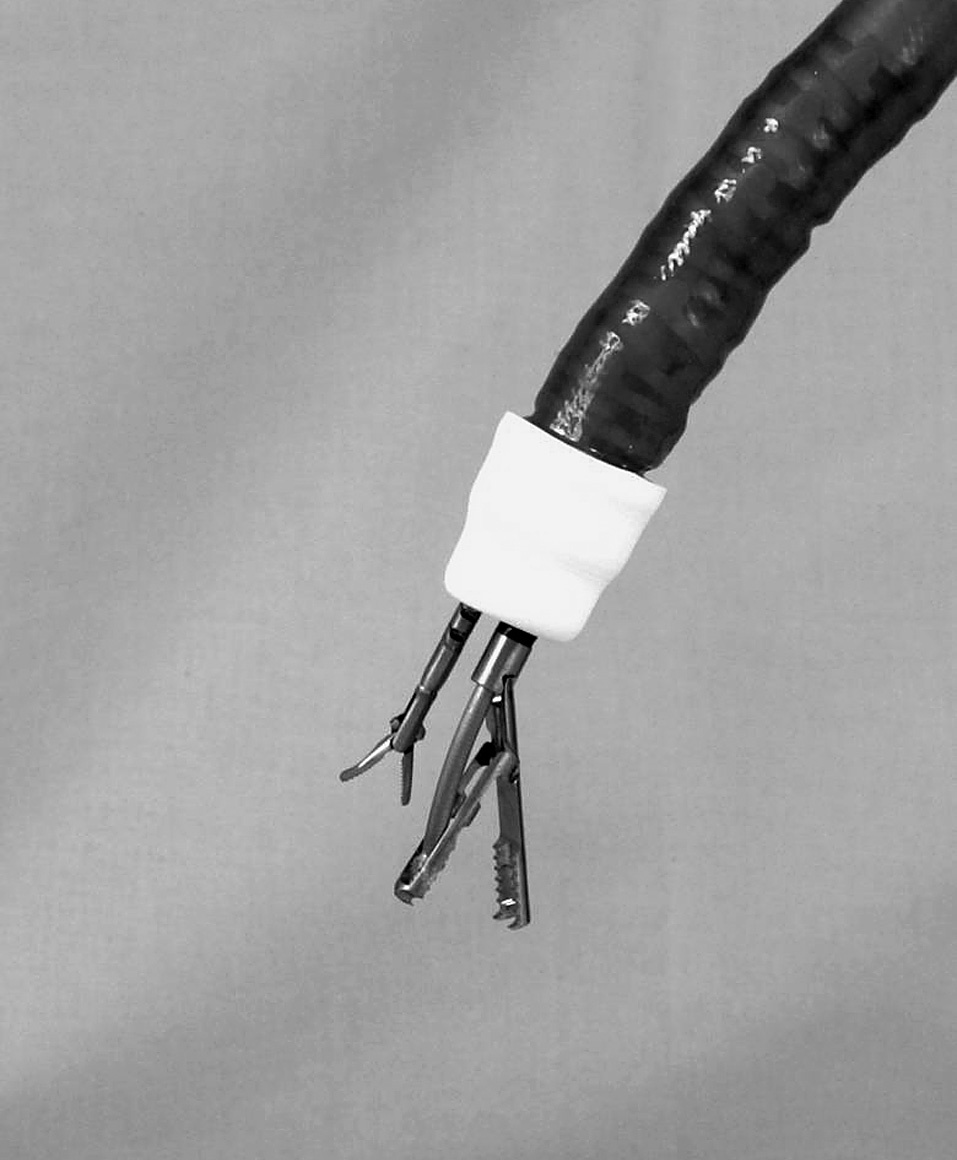
El número de instrumentos endoscópicos flexibles disponibles en la actualidad es escaso y estos dispositivos tienen un diseño bastante pobre. El pequeño calibre de los canales de los endoscopios flexibles actuales limita el tamaño de los efectores terminales. Un problema importante es el de los dispositivos de sujeción tisular. Aparte de unos pocos dispositivos de sujeción en "dientes de rata", mayormente son herramientas para la obtención de muestras de biopsia, ya que en la actualidad ésta es la indicación más habitual. Idealmente, los instrumentos para utilizar en la cirugía endoscópica flexible deberían reproducir los diseños de los instrumentos laparoscópicos para permitir la realización de intervenciones quirúrgicas verdaderas. La plataforma Transport tiene canales de trabajo de 7, 6 y 4 mm que permiten la creación de dispositivos de sujeción tisular de 4,5 mm con mandíbulas de 2,5 cm, similares a las herramientas laparoscópicas (fig. 4). Es necesario desarrollar herramientas quirúrgicas verdaderas en formato flexible, que incluyan fuentes de energía mejoradas para la disección y la hemostasia, de manera que puedan ser alternativas al cauterio Bi-cap, el bisturí de aguja y el esfinterótomo.
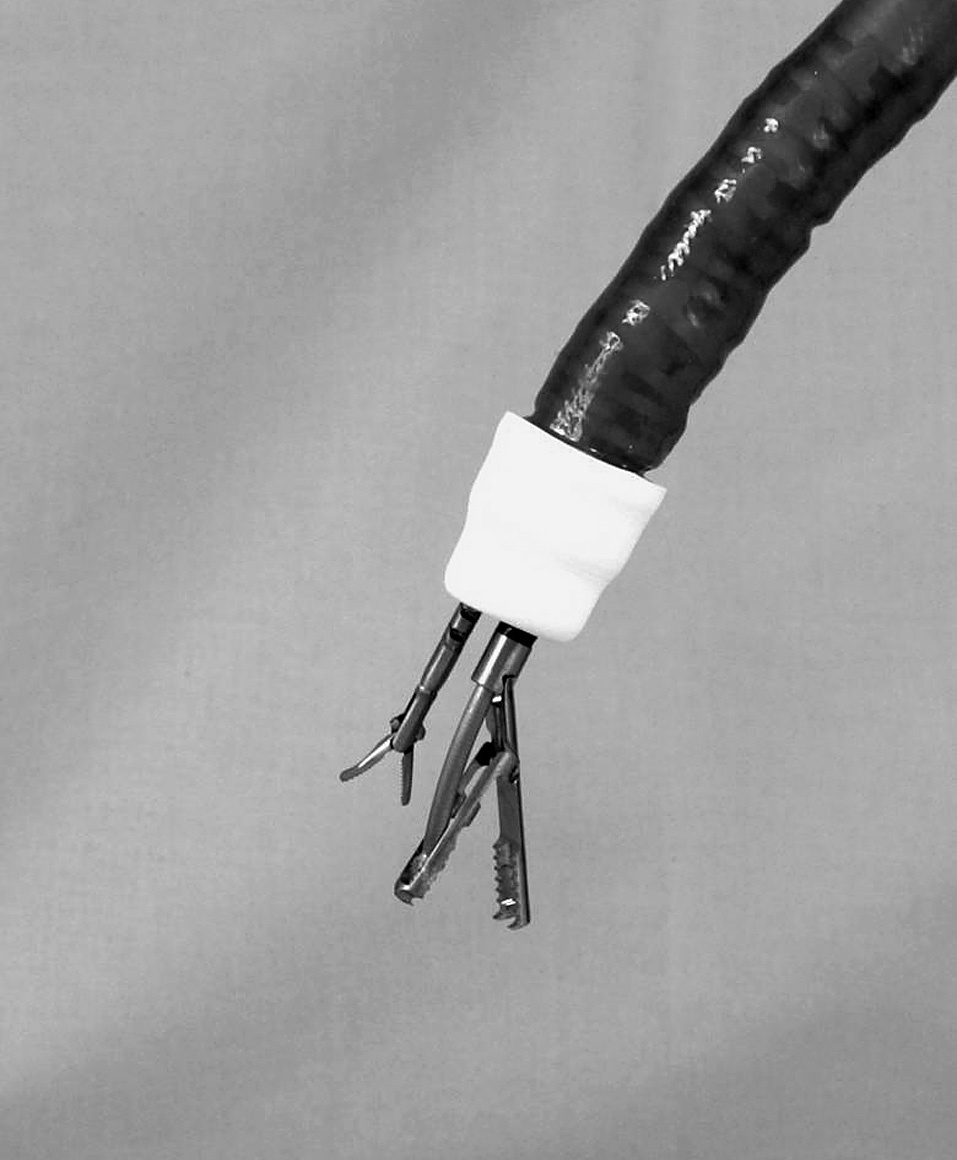
Fig. 4. Ejemplo de un dispositivo de extracción grande, de 4,5 mm, para la tecnología NOTES.
Aproximación tisular
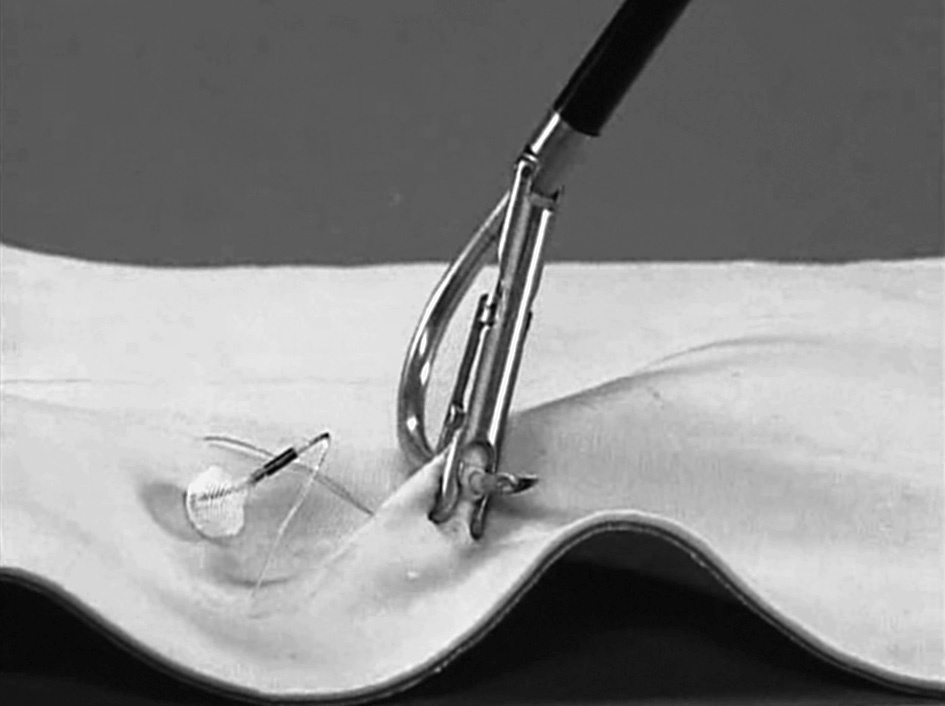
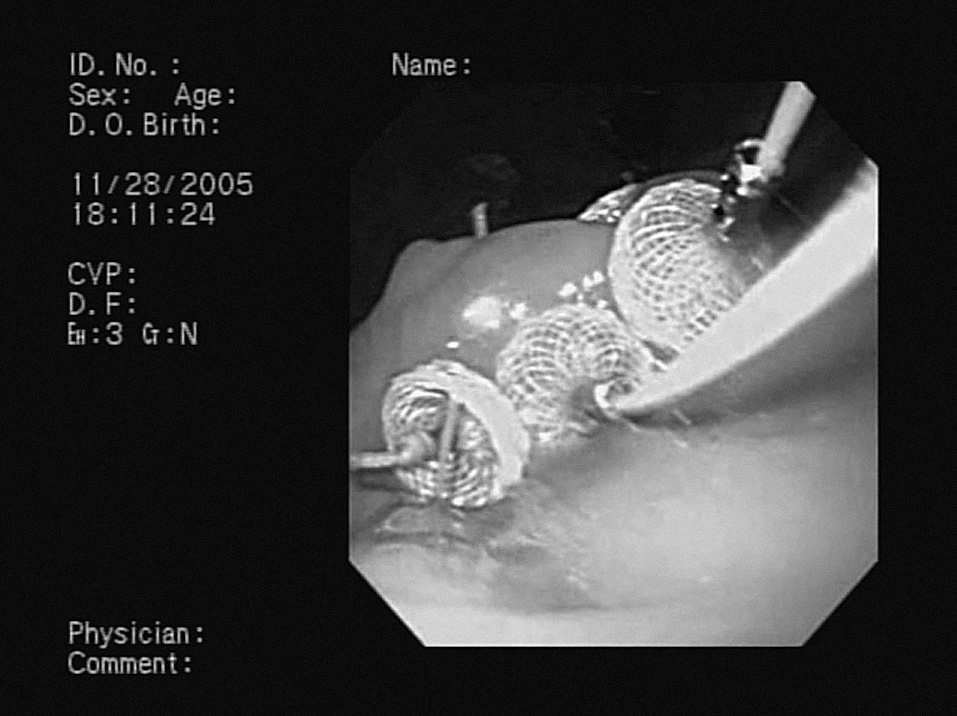
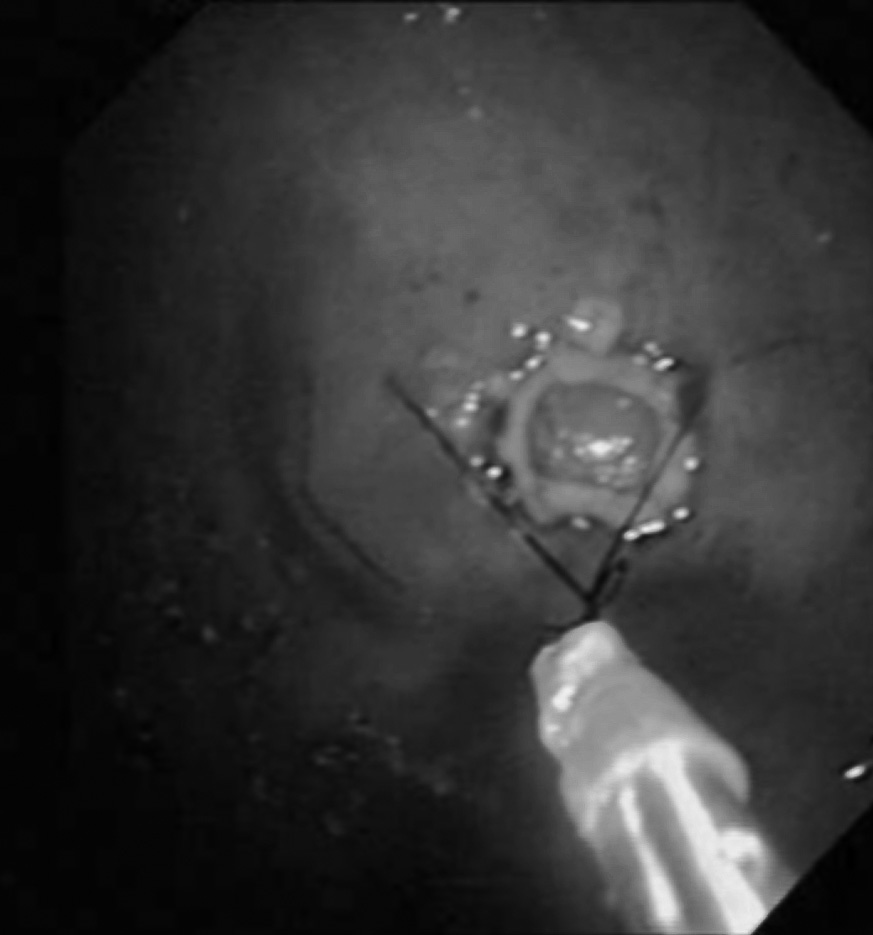
En enero de 2006 tuvo lugar una reunión conjunta de gastroenterólogos y endoscopistas quirúrgicos interesados en la endoscopia quirúrgica avanzada, en la que se trató de diversas cuestiones relativas a la tecnología NOTES4. En esa reunión hubo un acuerdo general en el sentido de que el cierre seguro de la enterotomía, que constituye el aspecto más novedoso y potencialmente más peligroso de la tecnología NOTES, es clave y de la máxima prioridad. Además, también hubo consenso en que la posibilidad de conseguir una aproximación tisular controlada es el aspecto más importante de cualquier nuevo abordaje quirúrgico, con objeto de conseguir el cierre de las perforaciones inadvertidas, las enterotomías deliberadas, la creación de anastomosis y el control de las hemorragias. Los criterios para el cierre de la enterotomía son las mordeduras profundas o de grosor completo, la colocación controlada y la seguridad uniforme del cierre. Hay muchos dispositivos que están en fase de desarrollo y posiblemente permitan alcanzar estos objetivos, lo que además será un avance tanto para los procedimientos NOTES como para otros procedimientos endoluminales, como los de escisión de grosor completo y los de cierre de perforación5,6. Dispositivos como Eagle Claw (Olympus) y el sistema de cierre Swain (Ethicon, Cincinnati, Ohio, Estados Unidos) parecen ser la respuesta a muchas de esas necesidades y están a punto de ser comercializados7. El sistema G-prox de USGI permite al cirujano la sujeción de una gran cantidad de tejido (incluso el grosor completo), con posibilidad de perforarlo perpendicularmente con una aguja de 19 G (fig. 5). El dispositivo de unión tisular es una sutura con 2 cestas de expansión que se carga en la propia aguja. La primera cesta se localiza en uno de los lados del tejido sujeto, que después se libera permitiendo que el dispositivo de agarre se convierta en una sutura en 8 o que aplique un punto de sutura sencillo. La segunda zona de fijación se perfora de nuevo con la aguja y se moviliza la segunda cesta. El estiramiento de uno de los extremos de la sutura hace que un dispositivo de estiramiento unidireccional aproxime las cestas, con expansión y aproximación de los bordes de la enterotomía (fig. 6). Esta maniobra se puede repetir las veces que sea necesario para conseguir un cierre seguro de la enterotomía. En el laboratorio, este dispositivo ha permitido el cierre de las gastrostomías con el mismo grado de seguridad que la sutura manual8. El dispositivo Eagle Claw se ha desarrollado con la colaboración entre el grupo Apollo y Olympus. Es un sistema de sujeción tisular y movilización de la aguja que se aplica en el extremo de un endoscopio convencional (fig. 7). También permite la sujeción de grandes cantidades de tejido y la realización de grandes mordeduras con la aguja. La aguja aplica una sutura monofilamento pretensada con un punto de fijación deslizante que se puede estirar con otro dispositivo. Muchos de los sistemas de aproximación tisular utilizan alguna variación de un dispositivo de unión en T introducido por una aguja de perforación. El sistema Swain incluye 2 dispositivos de unión en T unidos por un elemento de fijación deslizante en la sutura de conexión (fig. 8). Este sistema es flexible y se puede aplicar fácilmente, pero se ha asociado a lesiones de las estructuras adyacentes debido a que su despliegue se realiza a ciegas.
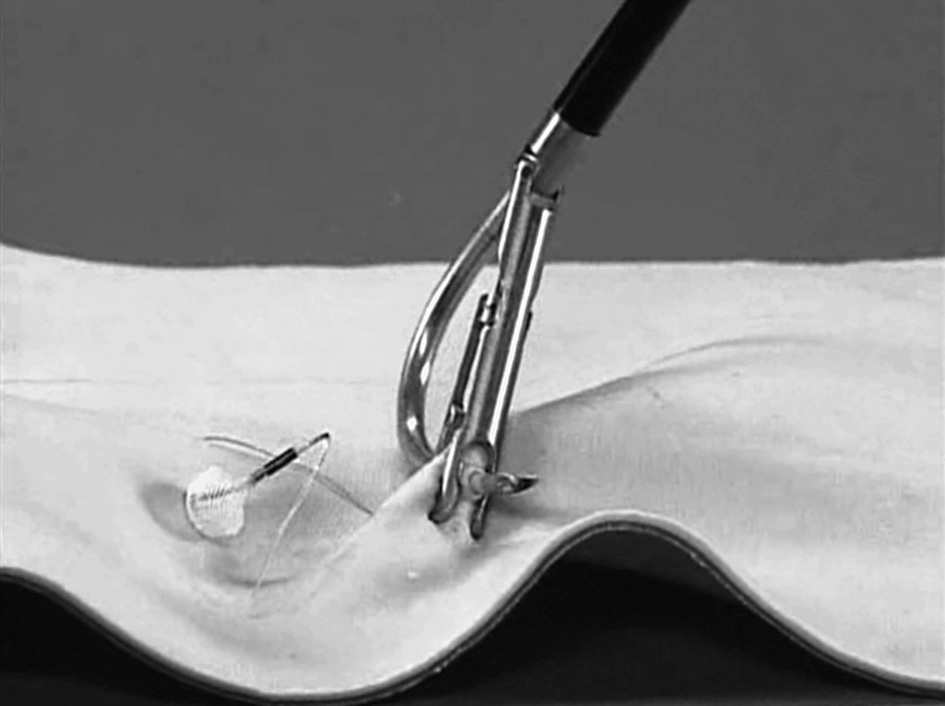
Fig. 5. Activación de la aguja G-Prox (USGI, San Capistrano, California, Estados Unidos) a través de los bordes sujetos de una gastrostomía.
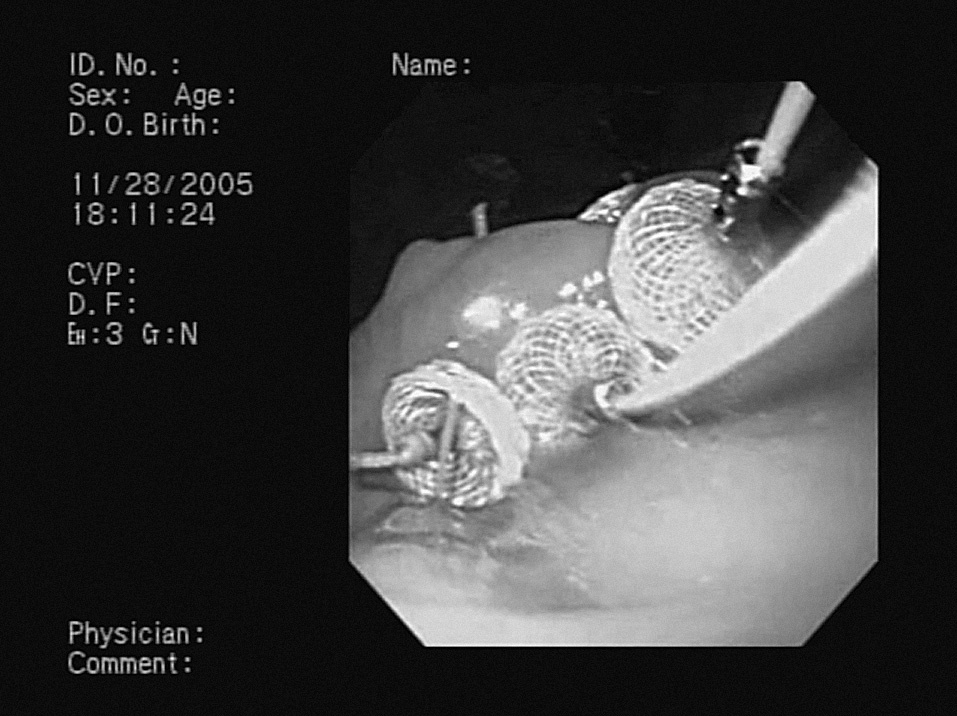
Fig. 6. Las cestas G-Prox estiradas para el cierre seguro de la gastrostomía.

Fig. 7. Dispositivo de sutura Eagle Claw (Olympus).
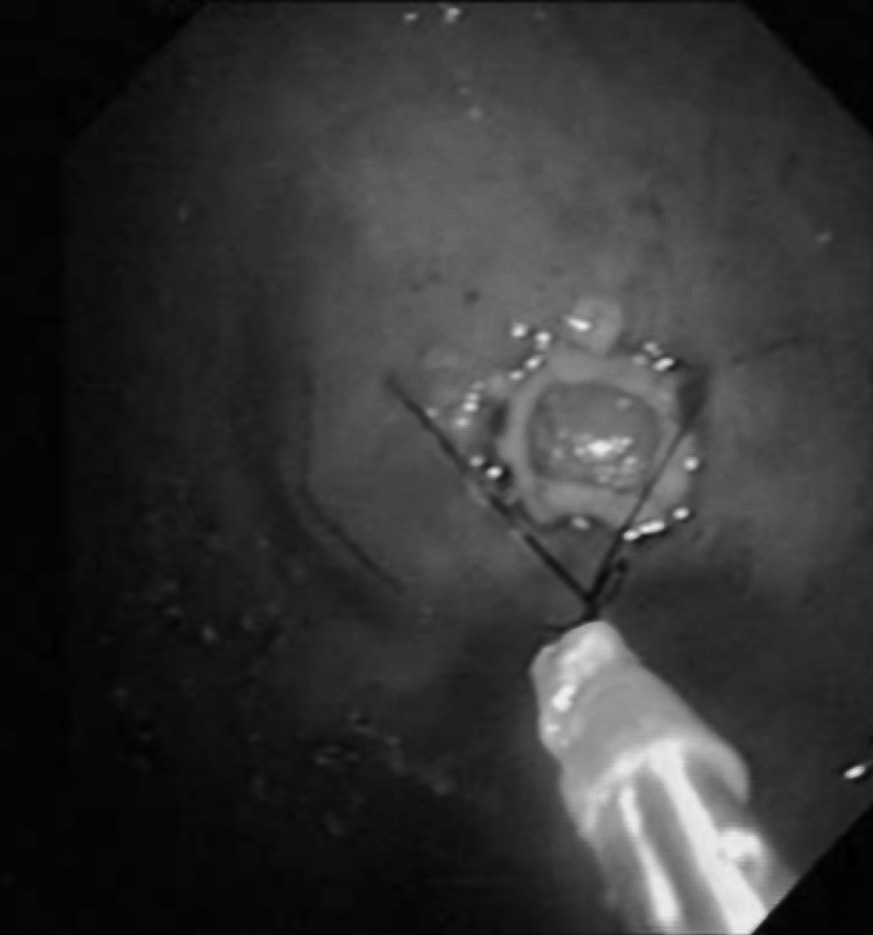
Fig. 8. Sistema Swain de dispositivo de unión en T.
Conclusiones
La cirugía va a evolucionar inevitablemente más allá de los abordajes endoscópico flexible y laparoscópico actuales. La tecnología NOTES puede ser la fase siguiente de la cirugía mínimamente invasora. El desarrollo de instrumentos seguros, eficaces y económicamente rentables es un aspecto esencial que hay que solucionar para introducir esta tecnología en la práctica clínica. En este artículo se presentan diversos dispositivos, actualmente en fase de investigación, que podrían resolver algunos de los obstáculos técnicos que plantea la tecnología NOTES. Se anima a los cirujanos a que participen en la evolución de nuevos endoscopios e instrumentos para conseguir que el resultado final facilite este avance quirúrgico y satisfaga tanto las necesidades de los propios cirujanos como las de los pacientes.
Correspondencia: Dr. L.L. Swanstrom.
1040 NW 2nd Ave. Suite 560. 97210 Portland, OR. Estados Unidos.
Correo electrónico: lswanstrom@aol.com
Manuscrito recibido el 19-6-2006 y aceptado el 23-6-2006.

