



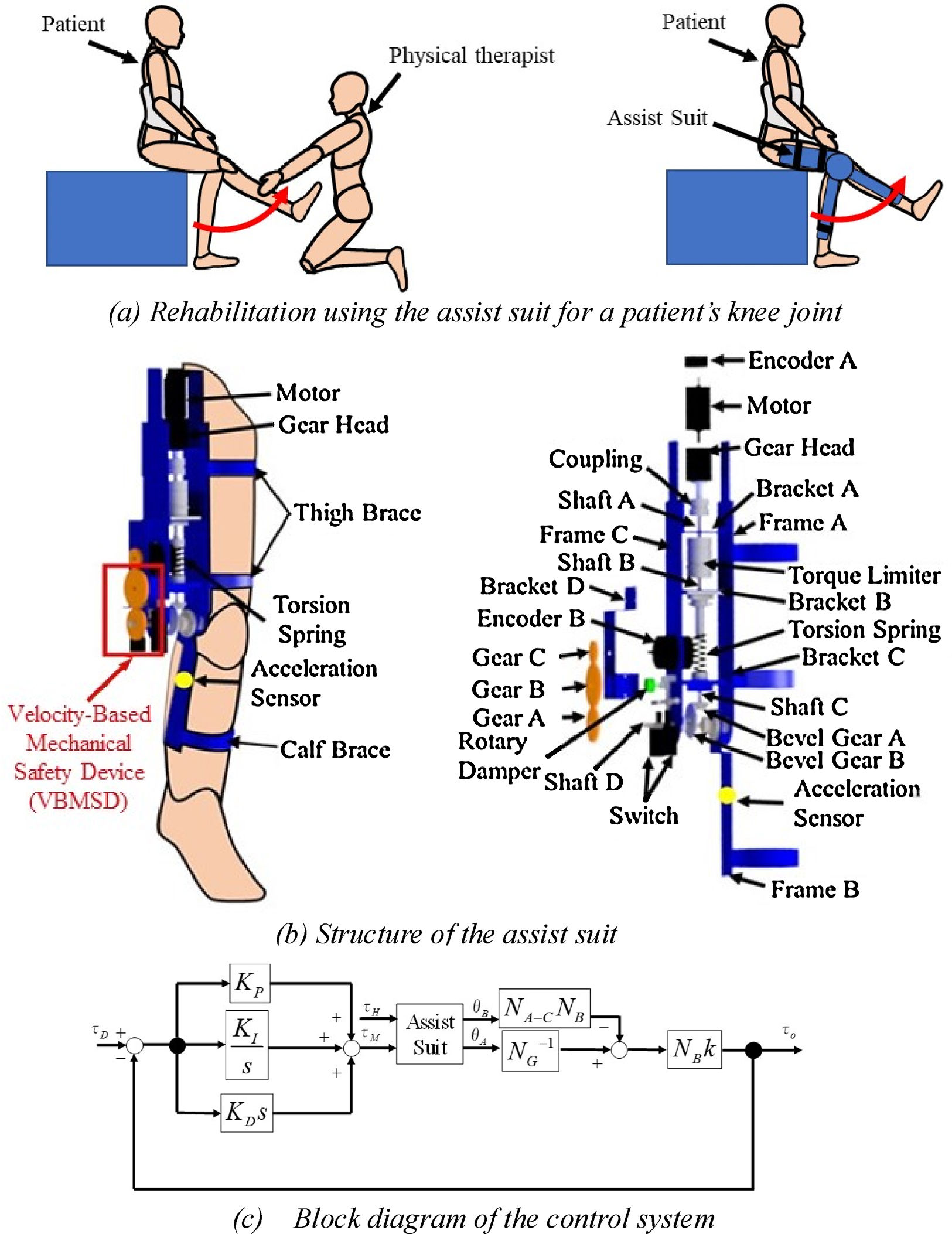
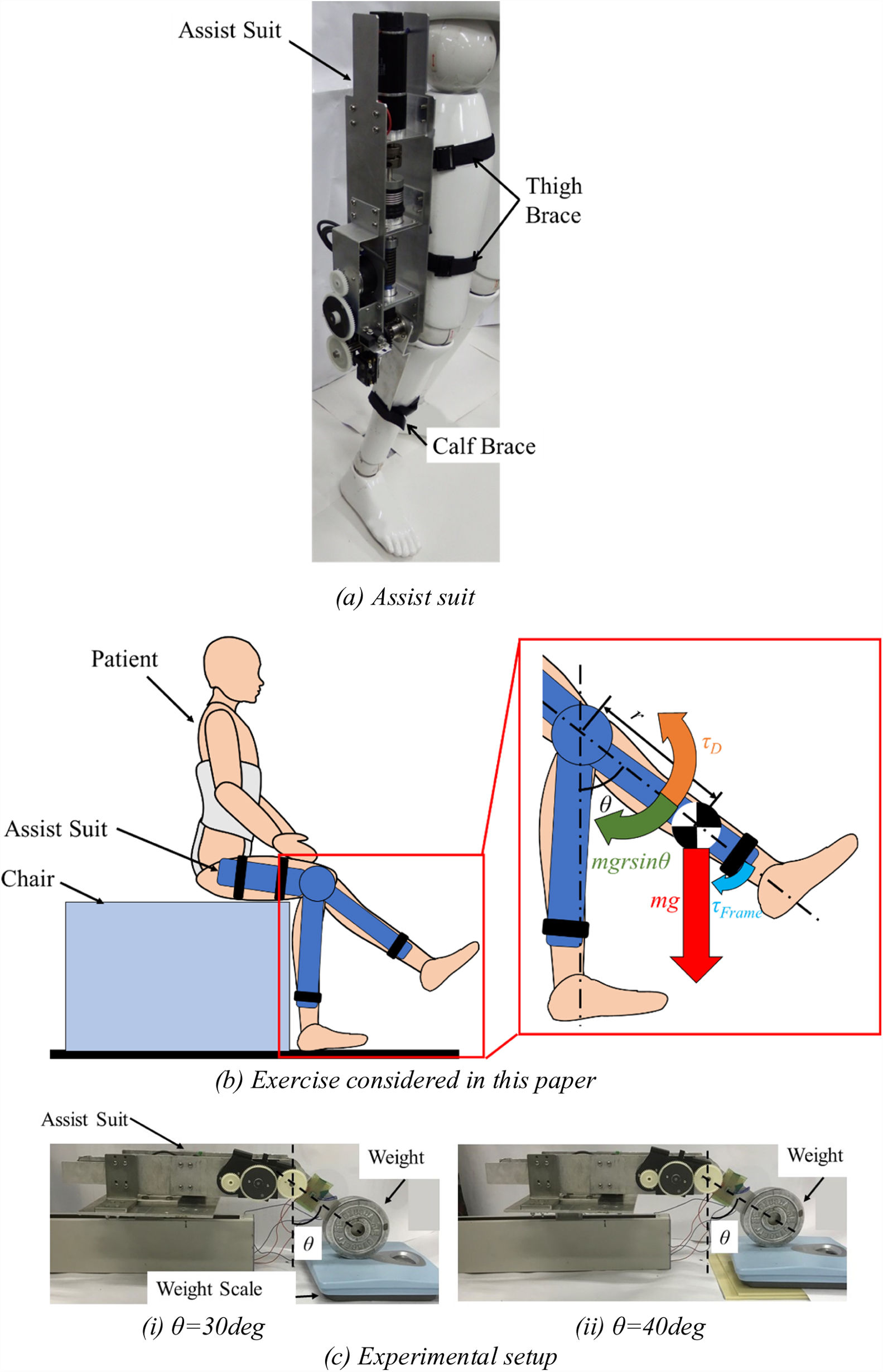
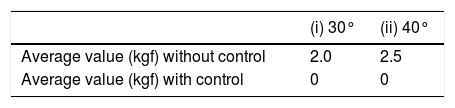
The aim of this study is to examine the proposed control method of the assist suit with a Velocity-Based Mechanical Safety Device (VBMSD) for patients with difficulty moving their lower legs by themselves. The proposed control method for the assist suit assists the patients as if the patients move their knee joint under zero gravity. A physical simulation model is used to examine whether the gravitational torque of the subject's lower leg and foot was canceled by the torque generated by the assist suit. Experimental results indicated that the gravitational torque of the subject's lower leg and foot is canceled by the torque generated by the assist suit. The control of the assist suit was not adversely influenced by the VBMSD. That is, the VBMSD did not prevent the control of the assist suit. The proposed control method makes the assist suit assist the patient in moving his/her knee joint in a zero gravity-like environment. However, a weight of 3kg was used instead of an actual patient in the experiment. Experiments with actual patients should be conducted to verify the effectiveness of the proposed control method in clinical use. Furthermore, it will be necessary to take into consideration the patients’ general conditions and symptoms.
Artículo
Comprando el artículo el PDF del mismo podrá ser descargado
Precio 19,34 €
Comprar ahora
