


La órtesis de marcha robotizada (Lokomat), disponible para su uso en rehabilitación desde el año 2001, ha sido crucial para el desarrollo tecnológico y científico de terapias destinadas a mejorar la marcha de adultos y niños con trastornos neurológicos de origen central.
El uso del Lokomat está orientado a la rehabilitación del aparato locomotor con el propósito de entrenar o reentrenar la capacidad de marcha mediante la repetición de una tarea específica considerando el concepto de plasticidad neuronal.
En el Instituto de Rehabilitación Infantil Teletón Concepción el Lokomat existe desde 2008. Esto ha permitido recoger experiencias relacionadas con los cambios observados en el desempeño de la marcha de niños con distintos trastornos de la marcha de origen neurológico tratados con esta órtesis robótica. Se presentan resultados preliminares de tres líneas de investigación que se están desarrollando actualmente incluyendo niños con Parálisis Cerebral Hemipléjica, Parálisis Cerebral dipléjica y con Síndromes Atáxicos.
The robotic assisted-treadmill (Lokomat), available for rehabilitation since 2001, has been crucial in the technological and scientific development of therapies designed to improve walking in adults and children with neurological central disorders.
The use of the Lokomat is aimed at the rehabilitation of the locomotor system with the purpose of training or retraining walking ability by repeating a specific task considering the concept of neuronal plasticity.
The Teletón Children’s Rehabilitation Institute of Concepción has the Lokomat since 2008, allowing collecting experiences related to the observed changes in walking performance of children with different gait disorders of neurological origin treated with this robotics orthesis.
The aim of this article is to present preliminary results from three lines of research that are currently being developed including children with Hemiplegic Cerebral Palsy, Diplegic Cerebral Palsy and Ataxic Syndromes.
La prevalencia de la Parálisis Cerebral (PC) en países occidentales oscila entre 1,5 a 2,5 niños por cada 1000 nacidos vivos. Durante los años noventa hubo una tendencia al descenso (1,2) no obstante, recientemente, se visto un incremento de la incidencia debido a la sobrevivencia de niños muy prematuros que desarrollan PC con compromisos funcionales moderados y severos (2,3).
Avances recientes en la neurociencia básica y clínica han permitido la implementación de terapias funcionales efectivas orientadas a mejorar la actividad funcional de los niños (4,5), condiciones que determinaran la mejoría del nivel de rendimiento de éstos en la vida cotidiana.
Los conceptos clásicos de aprendizaje motor sostienen que la práctica repetitiva de una tarea específica puede mejorar, significativamente, la función motora entrenada (6,7).
Resultados de estudios desarrollados en modelos animales, sugieren la existencia de redes neuronales, dentro de la medula espinal, que serían capaces de generar patrones de marcha que facilitarían esta función (8). Estas redes espinales también existirían en la población humana, hipótesis que se apoya fuertemente en el hecho de que el reflejo de marcha automática se conserva, incluso, en recién nacidos portadores de una anencefalia (9,10).
Así mismo, existe evidencia de que la terapia orientada al aparato locomotor destinada a recuperar la capacidad de la marcha, usando el principio de potenciar la neuroplasticidad mediante el entrenamiento de una tarea específica, es efectiva en los procesos de rehabilitación en pacientes con trastornos de la marcha de origen central (6,8,11).
La terapia con Ortesis de marcha robotizada (Lokomat) es usada en la rehabilitación de adultos y niños para mejorar la función de marcha como un entrenamiento de una tarea específica (7,12).
Hay reportes de casos de niños con PC tratados con Lokomat en los que se ha visto mejoría de su función motora gruesa, de la velocidad de la marcha y de su resistencia (13,16).
El uso del Lokomat, por períodos extendidos de tiempo, permite lograr y mantener patrones de marcha similares a los fisiológicos (17). Incluso se han visto cambios en la activación de patrones supraespinales siguiendo la locomoción robótica en lesionados medulares incompletos (18).
El Lokomat es un tipo de exoesqueleto operado en conjunto con un treadmill (19,20).
Estudios realizados con casos controlados han mostrado su eficacia pacientes con Accidente Vascular Encefálico (21).
La factibilidad y eficacia de la terapia con órtesis de marcha robotizada en niños con desórdenes neurológicos en la marcha, de origen central, fue mostrada recientemente revelando mejorías en la velocidad (test de marcha de 10 min.), resistencia (test de marcha de 6 min.) y desempeño en tareas funcionales (dimensiones D y E de la GMFM) (22,23).
Terapia con lokomatLa terapia con órtesis de marcha robotizada es una forma de terapia física que usa un dispositivo robótico para ayudar al paciente a mejorar su habilidad para caminar.
El paciente es suspendido en un arnés, sobre el treadmill y un exoesqueleto robótico lo sostiene a través de correas exteriores en las extremidades inferiores que las movilizan simulando un patrón de marcha normal (figura 1).

Un computador controla el ritmo de la marcha y mide la respuesta a la carga durante el movimiento.
Con el Lokomat, el dispositivo robótico hace la mayor parte del trabajo pesado, que se necesita para realizar la marcha.
El patrón de marcha es consistente en toda la sesión y el ejercicio puede ser mantenido por largos periodos de tiempo haciéndolo más efectivo.
En pacientes con dificultades de atención o motivación, la existencia de un monitor interactivo frente a ellos, favorece la adhesión y la sistematización del tratamiento indicado.
Los pacientes que serán tratados con el Lokomat deben ser evaluados clínicamente antes de iniciar el entrenamiento.
Existen requisitos establecidos que determinan la idoneidad de la indicación de esta terapia física.
- •
Deben tener sobre 4 años de edad (se requiere largo mínimo del fémur de 21cm.).
- •
Su trastorno de la marcha debe originarse en un daño neurológico central (Parálisis cerebral, accidentes vasculares encefálicos, Traumatismos encefalocraneanos). Se usa, igualmente, en lesionados medulares incompletos.
- •
También se han visto beneficios en pacientes secuelados de Síndrome de Guillain Barré y en niños amputados de origen congénito o adquirido.
- •
Todos ellos deben tener alguna capacidad de marcha con carga parcial y poseer habilidades cognitivas que aseguren el poder seguir instrucciones y señalar la presencia de molestias o dolor.
- •
La terapia con Lokomat no está recomendada en pacientes con espasticidad severa (debe ser tratada previamente). La presencia de inestabilidad cardiovascular o enfermedad tromboembólica contraindica su uso.
- •
Enfermedades óseas: como fracturas, inestabilidades articulares, escoliosis mayores a 20º y osteoporosis no permiten la realización de esta terapia.
- •
La piel debe encontrarse indemne. Lesiones del aparato musculoesquelético con restricción de carga de peso no están consideradas.
- •
La órtesis robótica no se puede instalar si existen retracciones severas de las articulaciones en extremidades inferiores.
- •
Debe tener capacidad ventilatoria adecuada.
- •
Se requieren capacidades conductuales pertinentes que permitan la instalación de la órtesis robótica, la suspensión del cuerpo y la mantención del entrenamiento por un periodo específico de tiempo (entre 30 y 60 minutos por cada sesión).
El Lokomat lleva funcionando en el Instituto de Rehabilitación Infantil Teletón 5 años.
En este período de tiempo pacientes, de diferentes condiciones patológicas, han sido tratados con este dispositivo robótico.
En el desarrollo de este proceso, hemos ido recolectando y sistematizando información de los cambios observados en los pacientes que han utilizado el Lokomat como terapia.
En concordancia con lo anteriormente planteado, tenemos datos preliminares en relación a 3 grupos de pacientes en los cuales los cambios observados han provocado el interés para sistematizar estos hallazgos.
Estos son niños con Parálisis Cerebral del tipo Hemipléjica, del tipo Dipléjica y un grupo con Síndromes Atáxicos.
Como instrumentos de medición se han considerado la observación clínica, la posturografía y el análisis tridimensional de la marcha.
Parálisis cerebral tipo hemiplejia espástica:En una experiencia preliminar y presentada en el congreso de la ESMAC 2012 (Sociedad Europea para el Análisis de Movimiento de Adultos y Niños), se realizó la siguiente investigación.
“Análisis tridimensional de la marcha en pacientes con parálisis cerebral hemipléjica entrenados con órtesis de marcha robotizada”.El objetivo general fue determinar con Análisis tridimensional de la Marcha el efecto del Lokomat en variables de marcha en niños con Parálisis Cerebral hemipléjica.
Para ello, se consideraron 20 niños, pacientes del Instituto de IRI Concepción, (promedio: 6 +-1,2 años, 14 hombres y 6 mujeres) que fueron seleccionados al azar simple, con diagnóstico de Hemiplejia secundaria a PC, compromiso motor GMFCS I y II, sin tratamiento alguno, al menos, 3 meses previos a la intervención terapéutica.
Estos niños completaron 18 sesiones, 30min. c/u, a velocidad de 1,3Km/h con 60 % de carga.
Fueron examinados con análisis tridimensional de la marcha siete días previos al tratamiento y siete días posterior al término de la terapia.
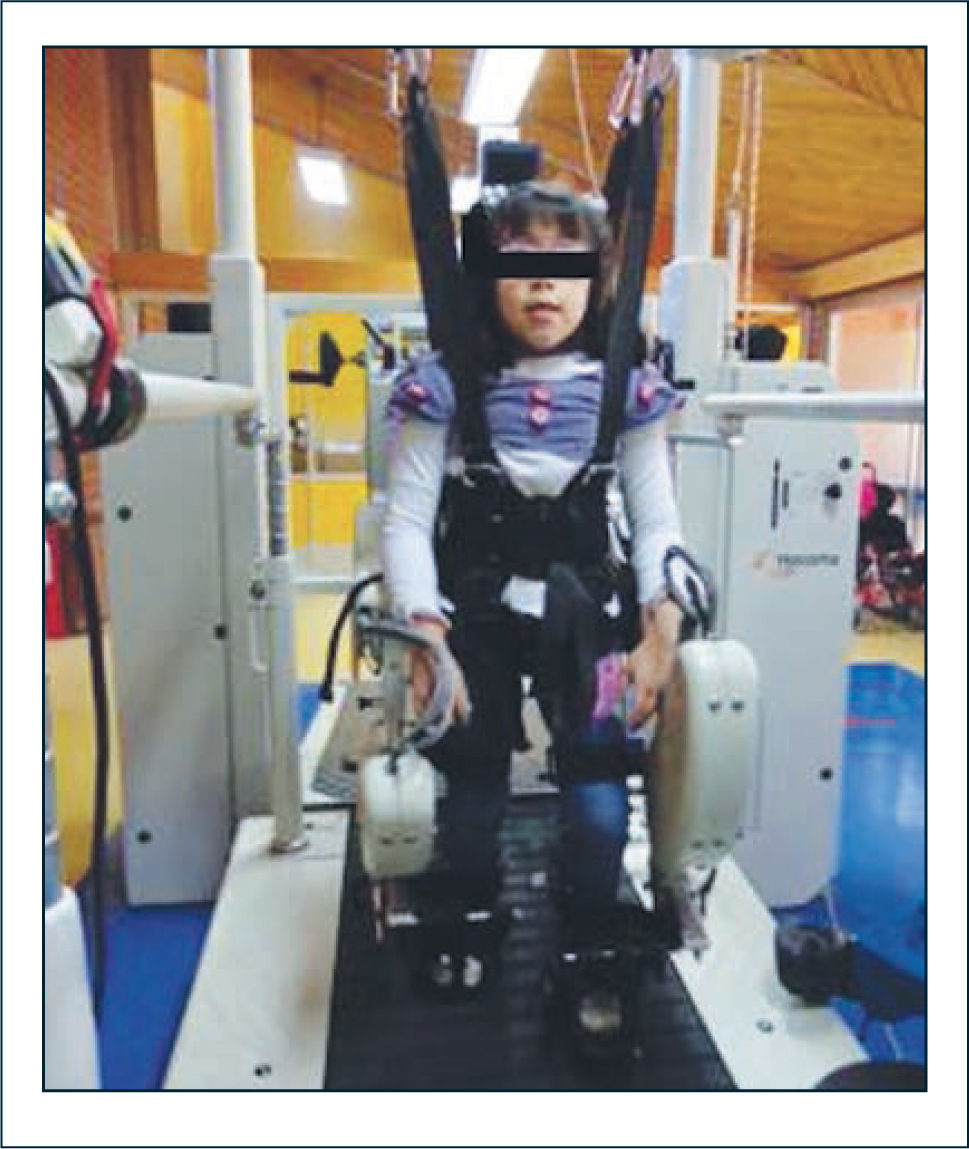
Del registro obtenido fueron analizadas las siguientes variables de estudio, apoyo contralateral, cadencia (N° de pasos por minuto), largo del paso lado comprometido, largo del paso lado sano, ancho del paso, velocidad de la marcha, flexión dorsal máxima del tobillo en balanceo y diferencia entre las rotaciones pélvicas.
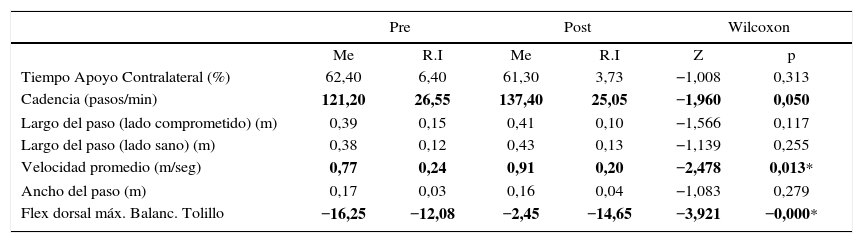
Se obtuvo mediana para el análisis de los datos encontrados (tabla 1). Entre los resultados destaca que el apoyo monopodal contralateral mejoró 2,2 %, la diferencia entre las rotaciones pélvicas de cada lado (simetría) disminuyó 3,4º.
medidas de resumen y significancia estadística en parámetros de marcha de 20 niños con pc hemiplejica entrenados con lokomat
| Pre | Post | Wilcoxon | ||||
|---|---|---|---|---|---|---|
| Me | R.I | Me | R.I | Z | p | |
| Tiempo Apoyo Contralateral (%) | 62,40 | 6,40 | 61,30 | 3,73 | −1,008 | 0,313 |
| Cadencia (pasos/min) | 121,20 | 26,55 | 137,40 | 25,05 | −1,960 | 0,050 |
| Largo del paso (lado comprometido) (m) | 0,39 | 0,15 | 0,41 | 0,10 | −1,566 | 0,117 |
| Largo del paso (lado sano) (m) | 0,38 | 0,12 | 0,43 | 0,13 | −1,139 | 0,255 |
| Velocidad promedio (m/seg) | 0,77 | 0,24 | 0,91 | 0,20 | −2,478 | 0,013* |
| Ancho del paso (m) | 0,17 | 0,03 | 0,16 | 0,04 | −1,083 | 0,279 |
| Flex dorsal máx. Balanc. Tolillo | −16,25 | −12,08 | −2,45 | −14,65 | −3,921 | −0,000* |
Me: Mediana.: R.I.: Rango intercuartiílico
El largo del paso bilateral y el ancho del paso no cambiaron.
La flexión dorsal máxima del tobillo en balanceo mejoró 7,7 grados (figura 2), la cadencia aumentó 27,1 pasos/min y la velocidad subió 0,2m/s. (P≤0,05).

Como conclusión se sugiere que la terapia con Lokomat podría ser un tratamiento efectivo para mejorar la marcha en los parámetros de tiempo y distancia (tiempo de apoyo monopodal, cadencia, velocidad) y kinemáticos (rotación pélvica y flexion dorsal de tobillo en el balanceo) en pacientes con Hemiplejia secundaria a Parálisis Cerebral, GMFCS I y II.
Estas mejoras se traducirían en una marcha más rápida, más simétrica, con menor sobrecarga de la extremidad sana y más fluida al lograr un paso libre del pie en el balanceo.
No se encontraron complicaciones en los pacientes tratados.
Todos los niños ingresados a tratamiento completaron el proceso. Creemos que estas mejorías en su desempeño en el marcha, se deben probablemente, al fortalecimiento de la musculatura dorsiflexora, reeducación el engrama motor y estimulación de la propiocepción logradas con este entrenamiento.
Como observación adicional destacamos la motivación de los niños para asistir a las sesiones en el Lokomat, la que, con alguna frecuencia, no se observa para concurrir a las terapias convencionales.
Parálisis cerebral tipo diplejía espásticaSiguiendo la línea anterior hemos comenzado el diseño de un protocolo para pacientes portadores de Diplejía Espástica secundaria a Parálisis Cerebral.
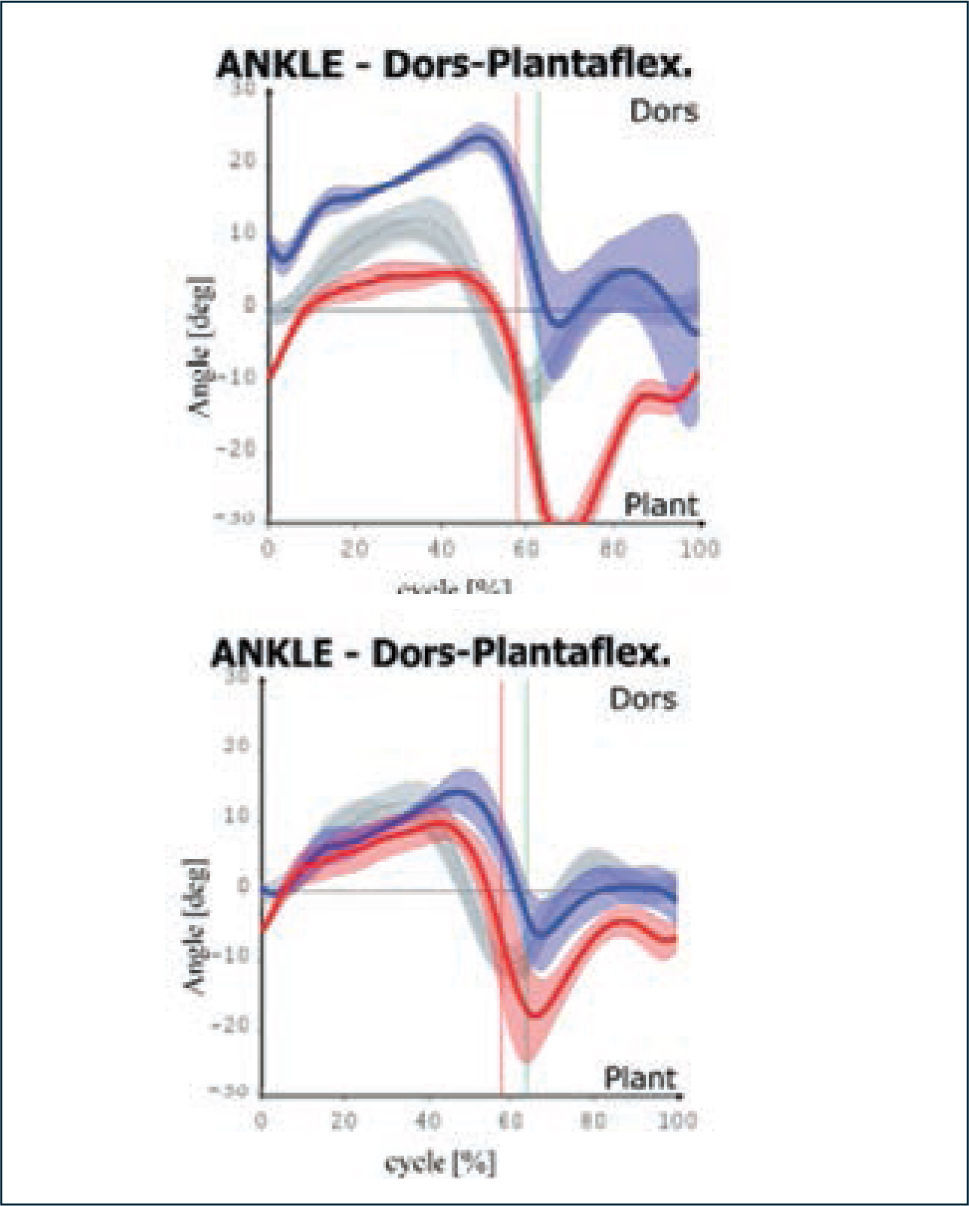
En estudios rutinarios de análisis tridimensional de la marcha realizados a pacientes dipléjicos leves y moderados (GMFCS I, II y III) tratados con Lokomat (18 sesiones de 30 minutos), hemos observado, con frecuencia, un aumento de la velocidad de la marcha relacionado con el aumento de la cadencia, disminución del ancho del paso y mejoría de la cinética de la cadera.
El aumento de la velocidad, la disminución de la base de sustentación y la normalización del torque de la cadera son signos de un desempeño más eficiente en la marcha logrado con el entrenamiento con esta órtesis robótica (figura 3).

Estamos en fase de anteproyecto para sistematizar este hallazgo en relación a pacientes con diagnóstico de Diplejía Espástica secundaria a Parálisis Cerebral.
Síndromes AtáxicosSe realizó un estudio con pacientes portadores Síndromes Atáxicos tratados con el Lokomat, pertenecientes al Instituto de Rehabilitación Teletón de Concepción.
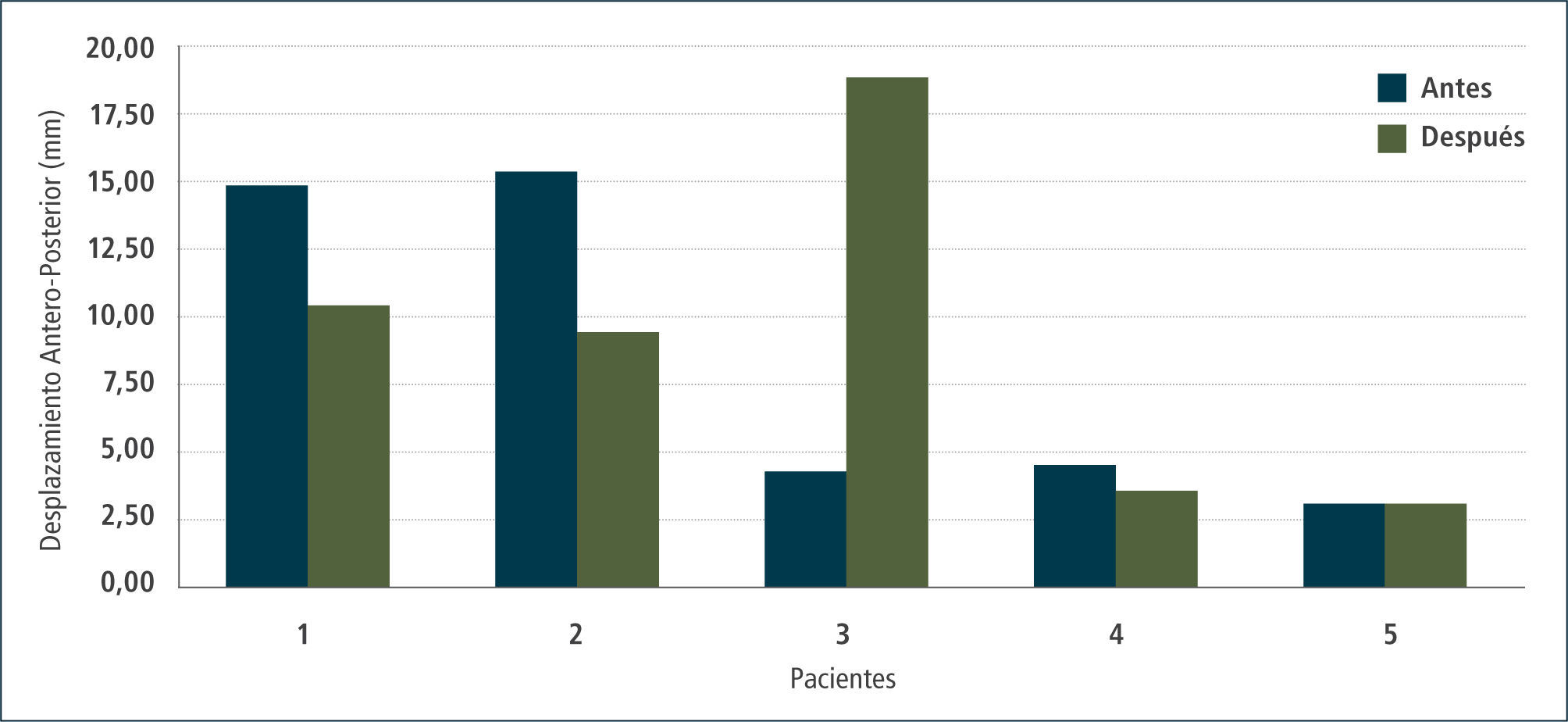
“Variación del balance estático posterior a entrenamiento con ortesis robótica en pacientes atáxicos”El objetivo principal fue determinar el efecto en el balance estático del entrenamiento con órtesis robótica en niños y jóvenes con Síndromes Atáxicos, pertenecientes a Teletón Concepción.
Se incluyeron 5 pacientes, con edades entre 5 y 25 años, 1 mujer y 4 hombres. Sus diagnósticos específicos fueron Ataxia de Friedreich, Ataxia Espino-Cerebelosa Autosómica Dominante, Ataxia secundaria a Enfermedad Metabólica (2 pacientes) y Ataxia secundaria a malformación de Dandy Walker.
Se entrenaron durante 18 sesiones de 30 minutos. No se permitió la realización de otros tratamientos concomitantes.
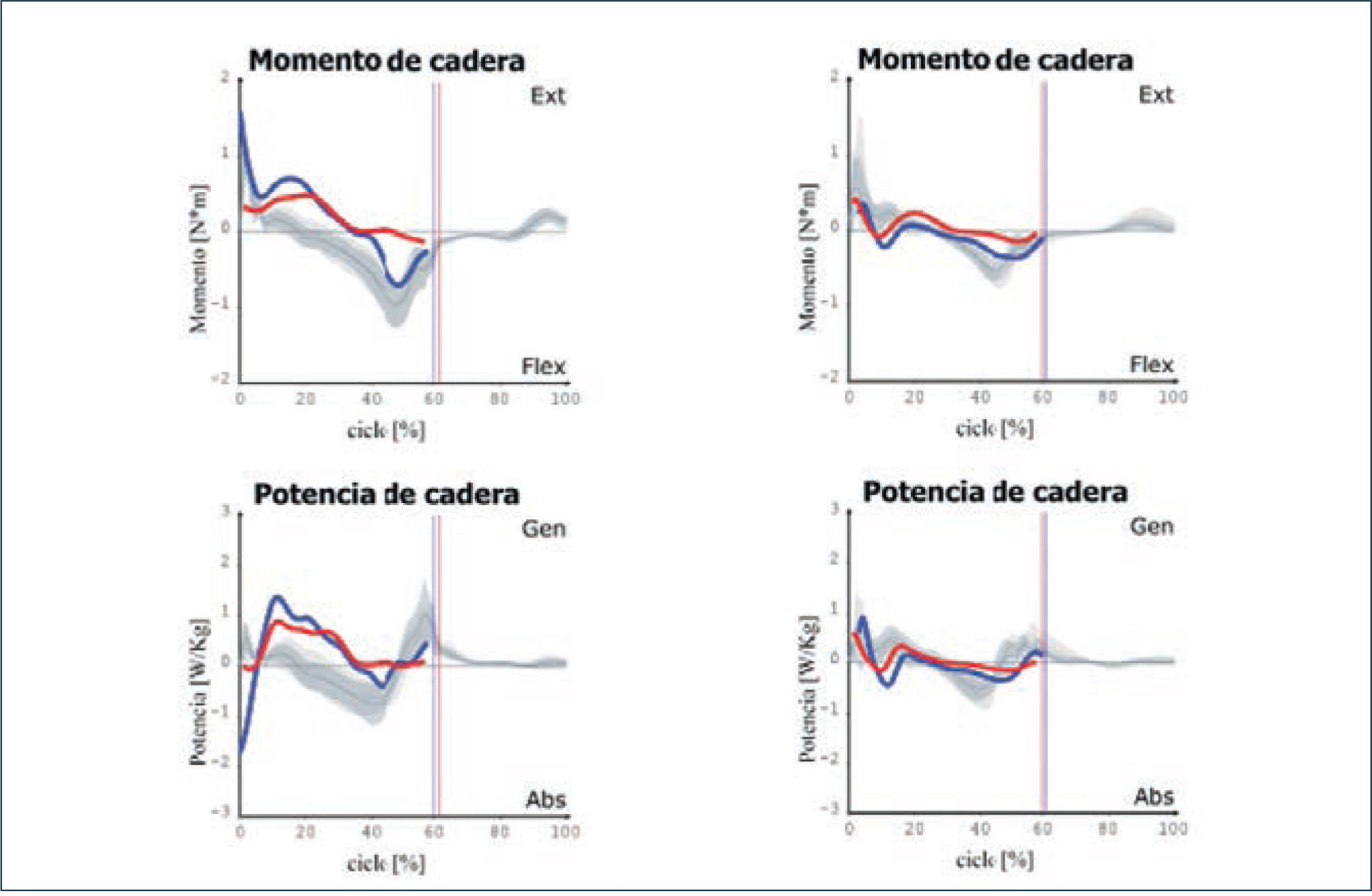
Se evaluó el desplazamiento del vector anteroposterior mediante la utilización de una Plataforma de Fuerza piezoeléctrica portable marca Kistler.
Los resultados mostraron que el desplazamiento del vector anteroposterior mejoró en 4 de los 5 pacientes estudiados (Gráfico 1).
 de cada paciente antes y después del entrenamiento con lokomat")
Los resultados expuestos sugieren que el entrenamiento con la órtesis robótica Lokomat genera beneficios en el balance estático de pacientes portadores de Síndromes Atáxicos.
ConclusiónLa terapia con órtesis robotizada Lokomat, ha mostrado ser beneficiosa en la mejoría del desempeño de la marcha en pacientes con trastornos neurológicos de de origen central.
Esta intervención terapéutica mostraría su mejor rendimiento en pacientes con compromiso funcional leve a moderado.
Estos cambios funcionales no se observan, al menos tan claramente, con la kinesiterapia tradicional en periodos comparables de intervención terapéutica.
Si bien es una tecnología de alto costo, los aparentes beneficios observados, en relación a mejoras objetivas y sostenidas en el tiempo (23), apoyarían la idea que sería, en el mediano plazo, costo efectiva.
La sistematización de la repetición del patrón de marcha como tarea específica y la adhesión de los pacientes a este tipo de terapia se describen como sus mayores ventajas comparativas.
Diferentes líneas de investigación, actualmente en curso, nos darán a futuro más certezas en relación a esta nueva herramienta terapéutica.
La autora declara no tener conflictos de interés, en relación a este artículo.